 Henri Vanini Coelho
Henri Vanini CoelhoThe design of the robotic arm robot programmable anthropomorphic manipulator, low cost and low complexity, with six degrees of freedom, Rufus, was executed in a satisfactory way and within the set of objectives proposed in this work have obtained good results. The work performed contemplated all the steps involved in the design and implementation of a mechatronic system from a modular methodology, where each main part (mechanical and electronic) was executed individually, with subsequent integration between the modules. It is a low-cost robot; respecting the environment. This technology is not feasible in research and teaching environments, such as in colleges and small businesses, due to the high cost and complexity of the equipment, limiting the diffusion of knowledge. Aiming at this market, the main objective of the project was the development of a programmable anthropomorphic robotic arm with six degrees of freedom. Rufus, controlled through the Arduino platform or via external controller, of low cost and of less complexity, to be applied for didactic purposes or assignments of small companies, with facility of alteration of functionality. The Course Conclusion Work of the Higher Course of Technology in Industrial Mechatronics of the SENAI Pernambuco Technology College allowed the students to know in an objective and qualitative way the routine of projects in the field of mechatronics and research. The activities developed provided employment of concepts absorbed during graduation in real projects applied to the industrial market, especially the development process. In addition to putting into practice the acquired technical knowledge, the work routine required the students' commitment to time and project management. Concomitantly, the organization, an essential item for a professional, corroborated daily routine of work.
0%
0%
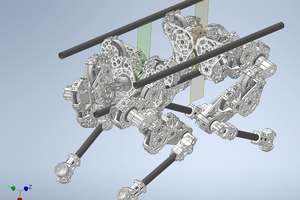
Rufus, ROBOTIC ARM PROGRAMMABLE ANTHROPOMORPHIC
Rufus, ROBOTIC ARM PROGRAMMABLE ANTHROPOMORPHIC MANIPULATOR, LOW COST AND LOW COMPLEXITY.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Shuang Peng
Shuang Peng
 Victor Barahona
Victor Barahona
 Giovanni Leal
Giovanni Leal
 K.O.
K.O.
I like the robot arm. Can you share? Ask how much this arm can lift?