 Paul Gould
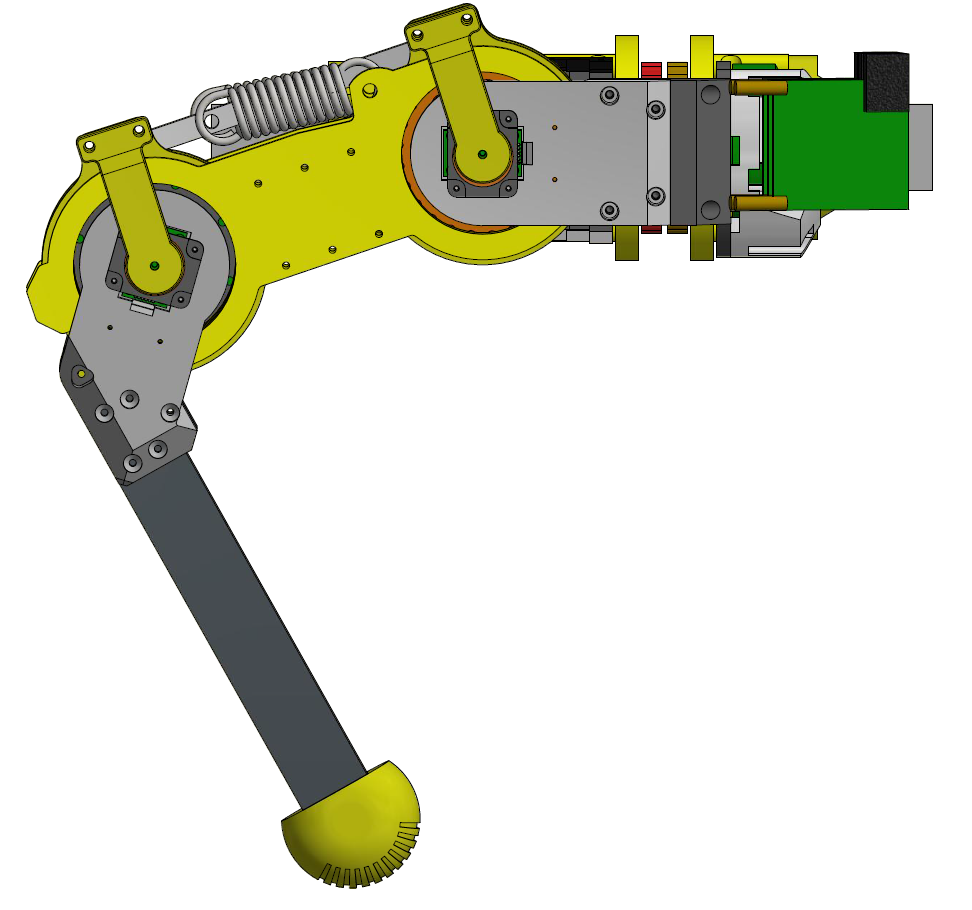
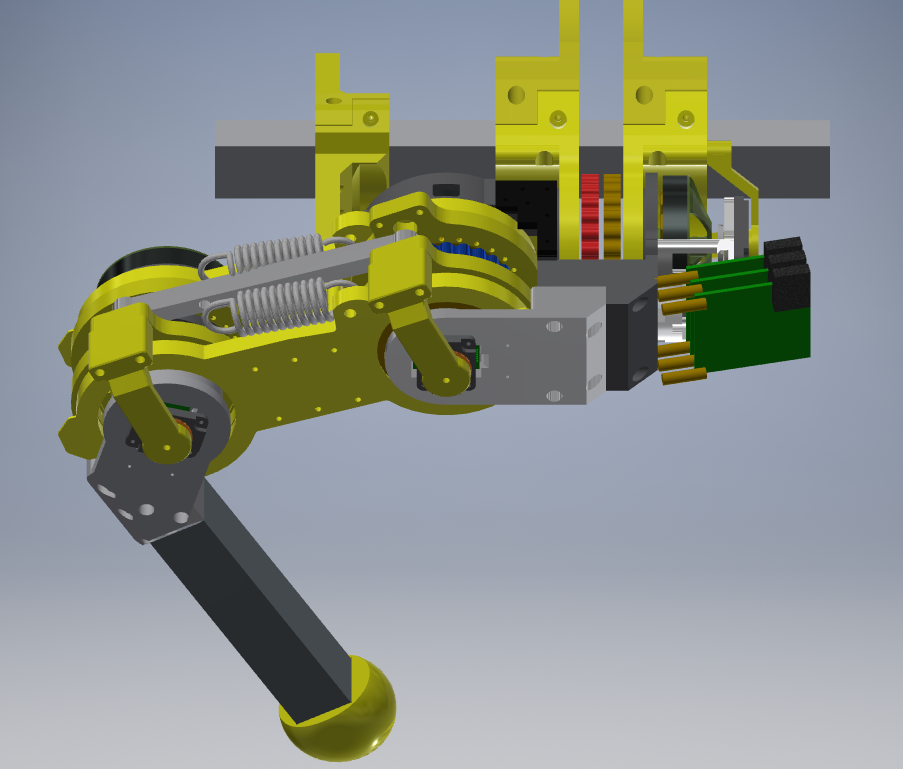
Paul GouldI have modified the base robot actuator to make it into a full robot leg for a quadruped. It has a parallel linkage with springs and 2 robot Actuators. This means that the spring direction changes from rotation to almost vertically linear when the leg is in the standard walking positions. Different strength springs can be swapped for testing, with the aim to store energy at the end of a jump cycle and use it for the next jump. It will also be used for efficient walking/running.
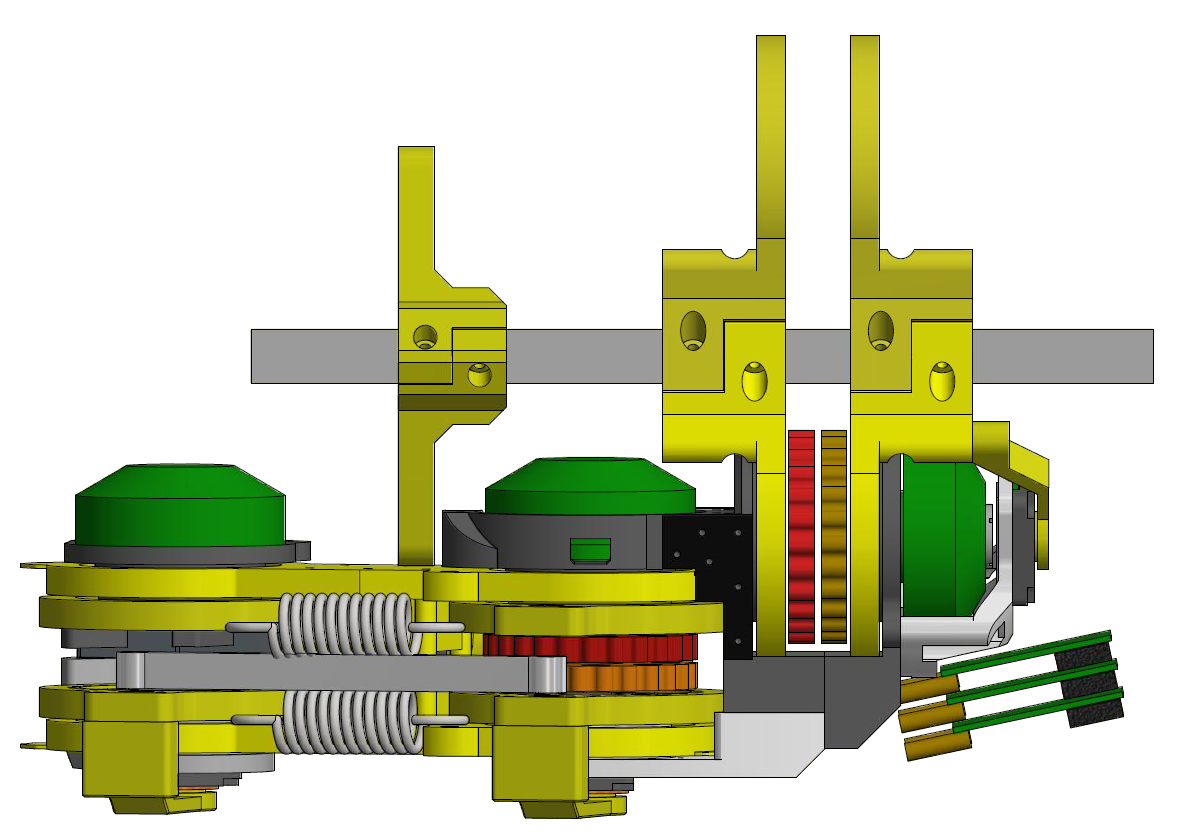
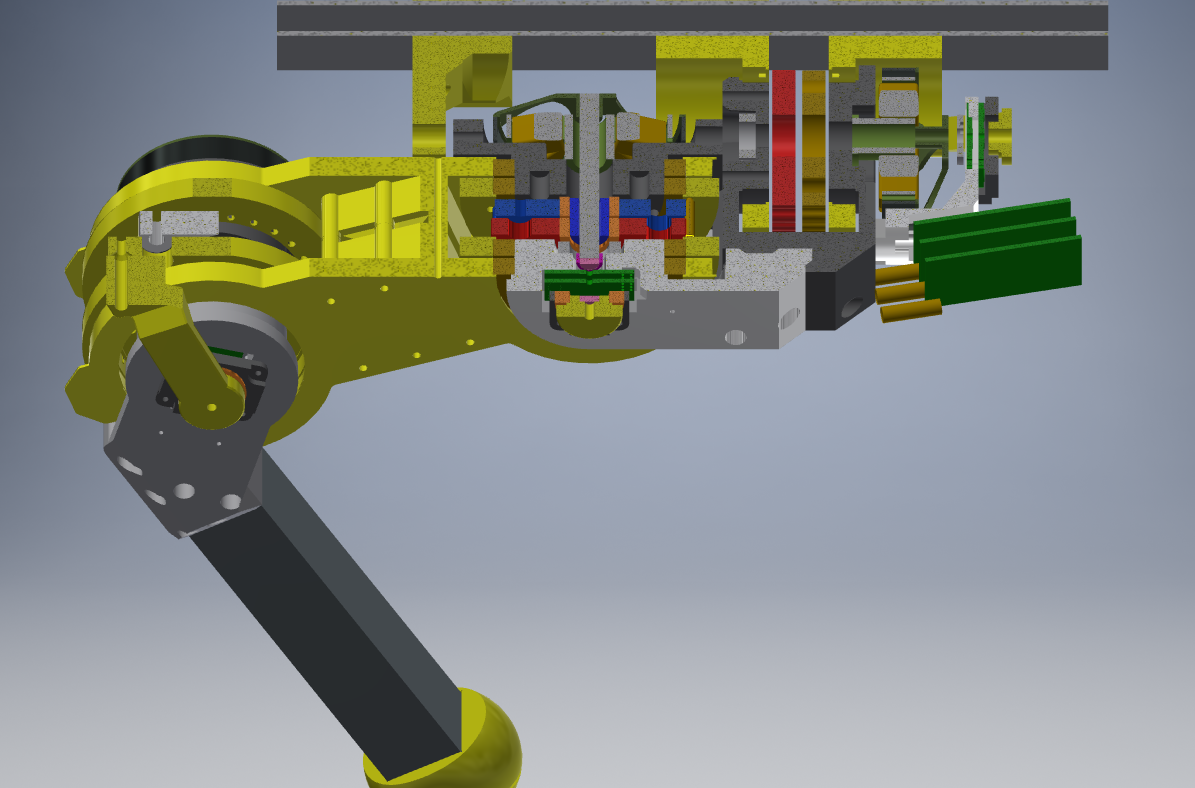
Everything rotates around the same joint, for the centre joint, described from top to bottom of the drawing.
- 6mm shaft running most of the way though
- Motor bell and flux ring
- Stator housing with 2 motor bearings
- Top outer housing
- Top Thigh plate with 6809 bearing
- Top Series elastic output plate (also actuator output shaft) with 6809 bearing
- Eccentric Cam with 2 lobes with 2 bearings each and 2 cycloidal gear
- Bottom Series elastic output plate (also actuator output shaft) with 6809 bearing
- Bottom Thigh plate with 6809 bearing
- Bottom shaft mount with bearing
- Motor angle Magnet holder
- Motor magnet (diametric)
- Bottom outer housing
- Motor position PCB
- Silicon steel flux cancellation plate (0.5mm thick)
- Joint position PCB
- Joint bearing holder (old protects the PCB)
- Joint magnet (diametric)
- Joint angle plate with bearing
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hi rudisoft, for me the SEA has two advantages. 1. It reduces the peak load seen by the 3D printed cycloidal gear when the foot hit the ground. 2. It allows the robot to jump
Are you sure? yes | no
Hi Paul, if the robot dog shall jump, you maybe want to check out https://www.youtube.com/watch?v=6hs-aHOc2Do&t=435s
Are you sure? yes | no
That is very nice. I also found this https://www.youtube.com/watch?v=36ZjYJXDk0w
Are you sure? yes | no
From G.A. Pratt, and M. M. Williamson, “Series elastic actuators,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 399-406, vol.1, 1995:
One of the most popular approaches is series elastic actuator (SEA), which has a constant spring between its actuator output and robotic link. While it remedies the high impedance of the actuators, it has the drawback of low stiffness and limited bandwidth that leads to degraded position control performance.
Are you sure? yes | no