 silver2row
silver2row-
1Hello...
Attach the wiring from the BBB while it is unplugged and there is no power going to the BBB to the L298 motor driver from Open-Electronics.org.
Go to bb-imager-rs online at https://github.com/beagleboard/bb-imager-rs. If your pins are configured for other uses outside of GPIO functionality, use the DTS files to initiate them or find what is available via gpioinfo. Right now, my kernel is 5.10.168-ti-r83 under a Debian/GNU Linux distro from beagleboard.org. It is of Bullseye and not Bookworm. There are other images available, depending on your needs, from the forums. You can search, under forums.beagleboard.org, latest-images and that search should bring you to a couple of images for Bullseye, Bookworm, and Trixie (I think).
So, that connection with this software will get you up and running quickly:
// I will work soon on making some moderate source code for this driver // line 12: "P8_12" "P8_12" input active-high [used] from gpiochip1 // line 13: "P8_11" "P8_11" input active-high [used] from gpiochip1 // line 14: "P8_16" "P8_16" input active-high [used] from gpiochip1 // line 15: "P8_15" "P8_15" input active-high [used] from gpiochip1 // Although gpioinfo states these pins that are available as an input, you can // set the pin(s) as output in source code // So, something like these ideas will help... #include <gpiod.h> #include <stdio.h> #include <unistd.h> #ifndef CONSUMER #define CONSUMER "consumer" #endif int main(int argc, char **argv) { const char *chipname = "gpiochip1"; struct gpiod_chip *chip1; struct gpiod_chip *chip2; struct gpiod_line *Motor1; int i, ret1, ret2; // Open GPIO chip chip1 = gpiod_chip_open_by_name(chipname); if (!chip1) { perror("Open chip1 failed\n"); return 1; } // Open GPIO lines Motor1 = gpiod_chip_get_line(chip1, 20); if (!Motor1) { perror("Get chip1 and Motor1 failed\n"); return 1; } // Open LED lines for output ret = gpiod_line_request_output(Motor1, "P8_12", 0); if (ret < 0) { perror("Request line as output failed\n"); return 1; } // Blink a LED i = 0; while (true) { ret = gpiod_line_set_value(Motor1, (i & 1) != 0); if (ret < 0) { perror("Set line output failed\n"); return 1; } usleep(1000000); i++; } // Release lines and chip gpiod_line_release(lineLED); gpiod_chip_close(chip); return 0; } // Add and Subtract until completion...this is a starter Script for Bullseye // on a Beagle Bone Black SBC with an am335x SoC.If this software only goes forward, stops, and shuts down, let me know. If that is too boring, look below. This software will control initialize, start forward, stop, reverse, and stop, and then shuts down and closes the software as it completes.
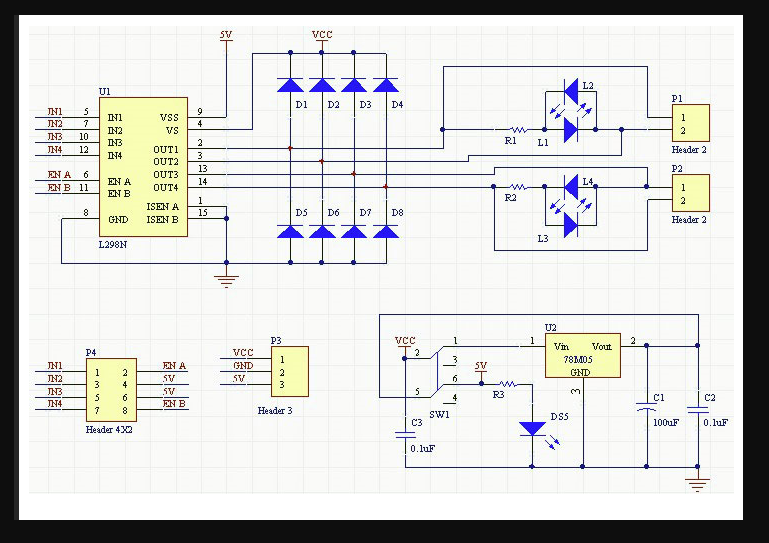
#!/usr/bin/python3 import tkinter as tk import gpiod import sys # Short script to handle tkinter and GPIOD initiatives. This should control a LED # or maybe more like a motor if done correctly... from time import sleep # --- GPIO Setup --- # Define the chip and line number for your Motor Driver CHIP_NAME1 = 'gpiochip1' LED_LINE_OFFSET1 = 13 CHIP_NAME2 = 'gpiochip1' LED_LINE_OFFSET2 = 14 try: chip1 = gpiod.Chip(CHIP_NAME1) left_line1 = chip1.get_line(LED_LINE_OFFSET1) left_line1.request(c, type=gpiod.LINE_REQ_DIR_OUT) chip2 = gpiod.Chip(CHIP_NAME2) right_line2 = chip2.get_line(LED_LINE_OFFSET2) right_line2.request(c, type=gpiod.LINE_REQ_DIR_OUT) except gpiod.FileNotFoundError: print(f"Error: GPIO chip '{CHIP_NAME1}' '{CHIP_NAME2}' not found. Ensure gpiod is installed and you are running on a compatible device.") sys.exit(1) except Exception as e: print(f"Error initializing GPIO: {e}") sys.exit(1) # --- Tkinter GUI Setup --- def toggle_motor(): val1 = left_line1.get_value() val2 = right_line2.get_value() new_val1 = 1 if val1 == 0 else 0 left_line1.set_value(val1) right_line2.set_value(val2) if val1 == 1: left_line1.set_value(0) # Turn Left on right_line2.set_value(1) toggle_button.config(text="Turn Motor Left") else: left_line1.set_value(1) # Turn Right on right_line2.set_value(1) toggle_button.config(text="Turn Motor Right") def cleanup_gpio(): left_line1.release() right_line2.release() chip1.close() chip2.close() root.destroy() root = tk.Tk() root.title("Motor Control") toggle_button = tk.Button(root, text="Turn Motor Left", command=toggle_motor) toggle_button.pack(pady=20) exit_button = tk.Button(root, text="Exit", command=cleanup_gpio) exit_button.pack(pady=10) # Ensure GPIO is cleaned up when the window is closed root.protocol("WM_DELETE_WINDOW", cleanup_gpio) root.mainloop()If you are wondering about the schematic of this particular motor driver, see the photos section or see here now:
![]()
See the L298N, dual H-bridge section for pin connections that need to be made.
Seth
P.S. Use a 12v battery if available. The motors can handle 2A maximum each forward and backwards. The L298 board can handle 5 to 30V DC.
BeagleBone Black and a L298 Motor Driver
This is a L298 motor driver from Open-Electronics.org and a BeagleBone Black with Python software
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.