Roger
Roger-
Sawppy Steering Coupler Volunteers For Fault Tolerance Test
03/08/2019 at 20:39 • 0 commentsWhenever I’m getting Sawppy ready for a public appearance, I power up my rover and drive it around a bit to make sure all the mechanical bits are functioning. I did the same for preparation for Sawppy’s appearance at SCaLE 17x and I saw the right front wheel – historically the most problematic part of any rover – is wobblier than I expected.
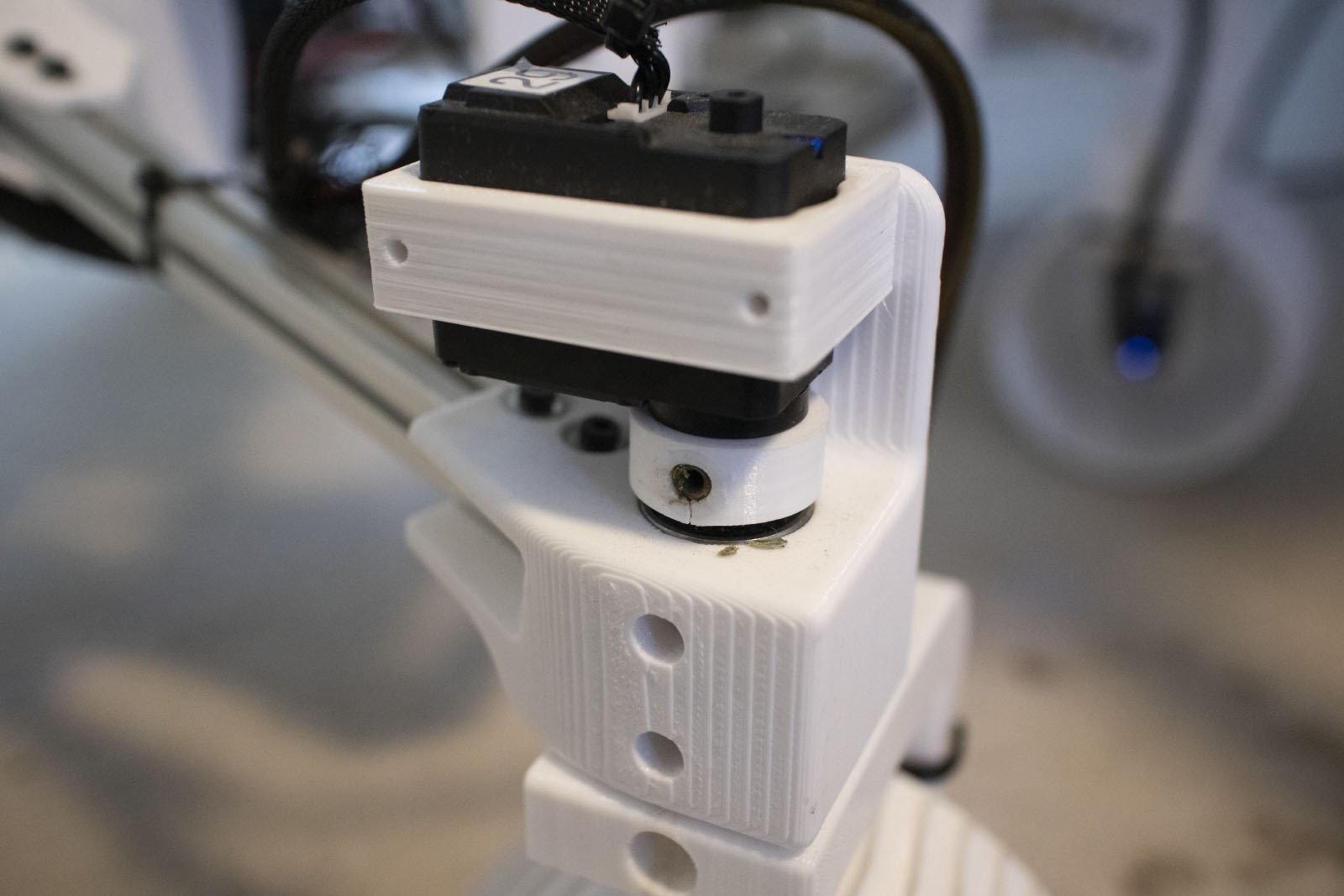
This usually indicates a set screw is backing out, something that was much reduced after I started using Loctite on the set screws. But when I reached towards the coupler with a wrench to turn the set screw, I realized this situation is different. The PETG plastic for the coupler has cracked.
![]()
For context, here’s the non-cropped version of the image to show location of this coupler in Sawppy’s front right wheel assembly.
![]()
This is a new failure! And a bit of a surprise, too. My experience with PETG to date has been that it is very tough and willing to flex instead of break like my experience with PLA. It’s held up well through multiple public appearances, driven by enthusiastic children who were none too gentle with the rover. It appears we have finally reached the breaking point for PETG.
Or… have we?
The rover is still driving and nominally functioning. System performance has degraded but strictly speaking, the system has not yet failed. The crack allowed more movement in wheel steering than designed, but the movement is still constrained instead of turning freely out of control. I would call the latter case, which happened to Sawppy earlier, an actual failure. This isn’t quite it.
And now I’m curious about what potential stages of system degradation will be, so I’m going to leave the cracked coupler in place for now. I will build a replacement and have it on hand for a field repair, but the cracked coupler has just volunteered itself for a test of Sawppy fault tolerance. How much further can Sawppy go on a cracked coupler?
(Cross-posted to NewScrewdriver.com)
-
Sawppy and SGVHAK Rover will be at SCaLE 17x
03/07/2019 at 20:02 • 0 commentsThis year's Southern California Linux Expo (SCaLE 17x) begins today. Four days of talks across multiple tracks focusing on topics relating to the flagship open source operating system in various ways. From small micro controllers to large cloud infrastructure. Last year's SCaLE served as deadline and motivation for completing SGVHAK Rover, but it was only for purposes of show and tell. We couldn't yet do a full presentation as the JPL Open Source Rover project has yet to officially launch until mid year.
But that is no longer a concern, and we even have spinoff projects like my Sawppy rover to add to the mix. Hence Sawppy will be part of our SGVHAK presentation "The Trouble with Rovers": they're never really finished, and their numbers keep growing. Rovers are such cool projects to work on there's always more upgrades and evolution we can perform to make our rovers better. Lan and I practiced this talk at last month's SGVLUG meetup and hopefully our presentation will be better for it! We'll be presenting Saturday afternoon 4:30-5:30pm in Ballroom G.
![]()
Sawppy will also be present at the Tindie+Hackaday Bring-a-Hack meetup, under their "Birds of a Feather" event umbrella for groups to get a space and meet. It is a free event (with at least a SCaLE Expo Pass) and Sawppy will be there as representative of one of the projects with a page on Hackaday.io. This will take place Friday evening 7pm-8pm in Ballroom B.
Beyond those events, Sawppy will be generally hanging out and cruising about the event and the expo floor. There'll probably be some time spent at the SGVLUG/SGVHAK booth, but no official scheduled events beyond the two above.
(Cross-posted to NewScrewdriver.com)
-
Sawppy at Brawerman East STEAM Makers Fair
03/06/2019 at 22:58 • 0 commentsSawppy’s next publicity appearance was at Brawerman East STEAM Makers Fair, a supercharged science fair at a private elementary school. Sawppy earned this invitation by the way of January presentation at Robotics Society of Southern California. The intent is to show students that building things is more than their assignments at their on campus Innovation Lab, there are bigger projects they can strive for beyond the classroom. But the format is, indeed, just like a school science fair, where Sawppy got a display table and a poster board.
![]()
But Sawppy is not very interesting sitting on a table, it didn’t take long before the rover started roving amongst other exhibits. The school’s 3D printer is visible on the left – a Zortrax M200.
![]()
Sawppy was not the only project from grown-ups present. I admire the ambition of this laser cutter project undertaken by one of the parents. Look at the size of that thing. It is currently a work in progress, and its incomplete wiring were completely removed for this event so little fingers are not tempted to unplug things and possibly plugging them in a wrong place.
![]()
The center of this tables had some old retired electronics equipment that kids will be able to take apart. This was a huge hit at the event, but by the end of the night this side of the room was a huge mess of tiny plastic pieces scattered all over.
![]()
I brought my iPad with the idea I could have Sawppy’s Onshape CAD data visible for browsing, but it turned out the iOS Onshape app required a live internet connection and refused to work from cache. As an alternate activity, I rigged it up to show live video footage from Sawppy’s onboard camera. This was surprisingly popular with the elementary school age crowd, who got a kick out of making faces at the camera and seeing their faces on the iPad. I need to remember to do this for future Sawppy outings.
![]()
After Sawppy was already committed to the event, I learned that a Star Wars themed art car was also going to be present. So I mentioned my #rxbb8 project which earned me a prime parking spot on the first floor next to the far more extensively modified “Z-Wing.” Prepare to jump to hyperspace!
![]()
(Cross-posted to NewScrewdriver.com)
-
Sawppy at Space Carnival Long Beach
02/21/2019 at 22:25 • 0 comments![]()
Space Carnival, held at the Expo Arts Center in Long Beach, California, welcomed Sawppy as one of several exhibits Monday afternoon. It turned out to be part of a week-long LEGO robotics camp for elementary school students. Most of the events are for campers, but the Monday evening Space Carnival was open to the public.
Since the focus is on LEGO, there were plenty of plastic bricks in attendance. The middle of the room had a big pile of bricks on a plastic tarp and kids were crawling all over the pile building their creations. Sawppy mostly spent time outside of the tarp, occasionally venturing on to some of the colorful game boards for LEGO robots to line-follow and other tasks.
![]()
As usual, I handed controls over for kids in attendance to play with. Running over feet is still more popular of an event than I can hope to understand but, if it makes them excited, so be it.
![]()
Sawppy was not the only non-LEGO robot in attendance, there were also a selection of Star Wars licensed merchandise including this R2D2. I forgot if this particular unit was made by Sphero or Hasbro.
![]()
This event was not the first time I crossed paths with Barnabas Robotics, but it was the first time I got to speak with them beyond the standard sales pitch type of discussions. Since their business is STEM education for students K-12, they have a good feel of what type of material is appropriate for various age groups. It’s possible Sawppy can find a role in high school curriculum.
(Cross-posted to NewScrewdriver.com)
-
Sawppy Has A Busy Schedule This Week
02/11/2019 at 21:14 • 0 commentsSince the time I declared Sawppy version 1.0 (mechanical maturity), I’ve been taking my rover out to various events. From casual social gatherings to large official events to presentation in front of others who might appreciate my project. Sawppy has been a great icebreaker for me to start talking with people about their interests, and sometimes this leads to even more events added to Sawppy’s event calendar. This coming week will be especially busy.
![]()
On Monday February 11th from 3pm-6:30pm Sawppy will be at Space Carnival, a FIRST Themed Event on Lincoln’s Birthday. Held at Expo Arts Center, a community space in Long Beach, CA. This event is organized by people behind local FIRST robotics teams. This year’s competition is titled “Destination: Deep Space” and has a very explicit space exploration angle to all the challenges. So even though Sawppy is nothing like a FIRST robotics competitor, an invitation was still extended to join the fun.
This event will be unique in that I had the option to be a roaming exhibit and I chose it for novelty. I think a rover who is roving will be much more engaging than a rover sitting on a table. It also means I will not be tied to a booth, so I could check out other exhibitors as I roam around with Sawppy. This eliminates the problem I had with Sawppy at DTLA Mini Maker Faire – I had to stay in one place for most of the event and couldn’t see what other people had brought.
On Wednesday February 13th Sawppy will join a STEAM Maker’s Fair at Brawerman East, a private elementary school. This is a small event catering to students and parents at the school. I believe the atmosphere will be similar to a school science fair, with exhibits of student projects. To augment these core exhibits, Sawppy and a few others were invited. The intent is to show that concepts covered in their on-campus Innovation Lab projects are just as applicable to bigger projects outside of their class.
And finally, on Thursday Februarh 14th Sawppy will be part of another SGVLUG presentation. A follow-up to the previous rover themed SGVLUG presentation, this will still set up background but will talk more about what has happened since our initial rover construction. This also serves as a practice run for a presentation to be given at Southern California Linux Expo (SCaLE) next month.
(Cross-posted to NewScrewdriver.com)
-
ROS In Three Dimensions: Navigation and Planning Will Be Hard
01/16/2019 at 22:28 • 0 commentsAt this point my research has led me to ROS modules RTAB-Map which will create a three dimensional representation of a robot's environment. It seems very promising... but building such a representation is only half the battle. How would a robot make good use of this data? My research has not yet uncovered applicable solutions.
The easy thing to do is to fall back to two dimensions, which will allow the use of standard ROS navigation stack. The RTAB-Map ROS module appears to make the super easy, with the option to output a two dimension occupancy grid just like what navigation wants. It is a baseline for handling indoor environments, navigating from room to room and such.
But where's the fun in that? I could already do that with a strictly two-dimensional Phoebe. Sawppy is a six wheel rover for handling rougher terrain and it would be far preferable to make Sawppy autonomous with ROS modules that can understand and navigate outdoor environments. But doing so successfully will require solving a lot of related problems that I don't have answers yet.
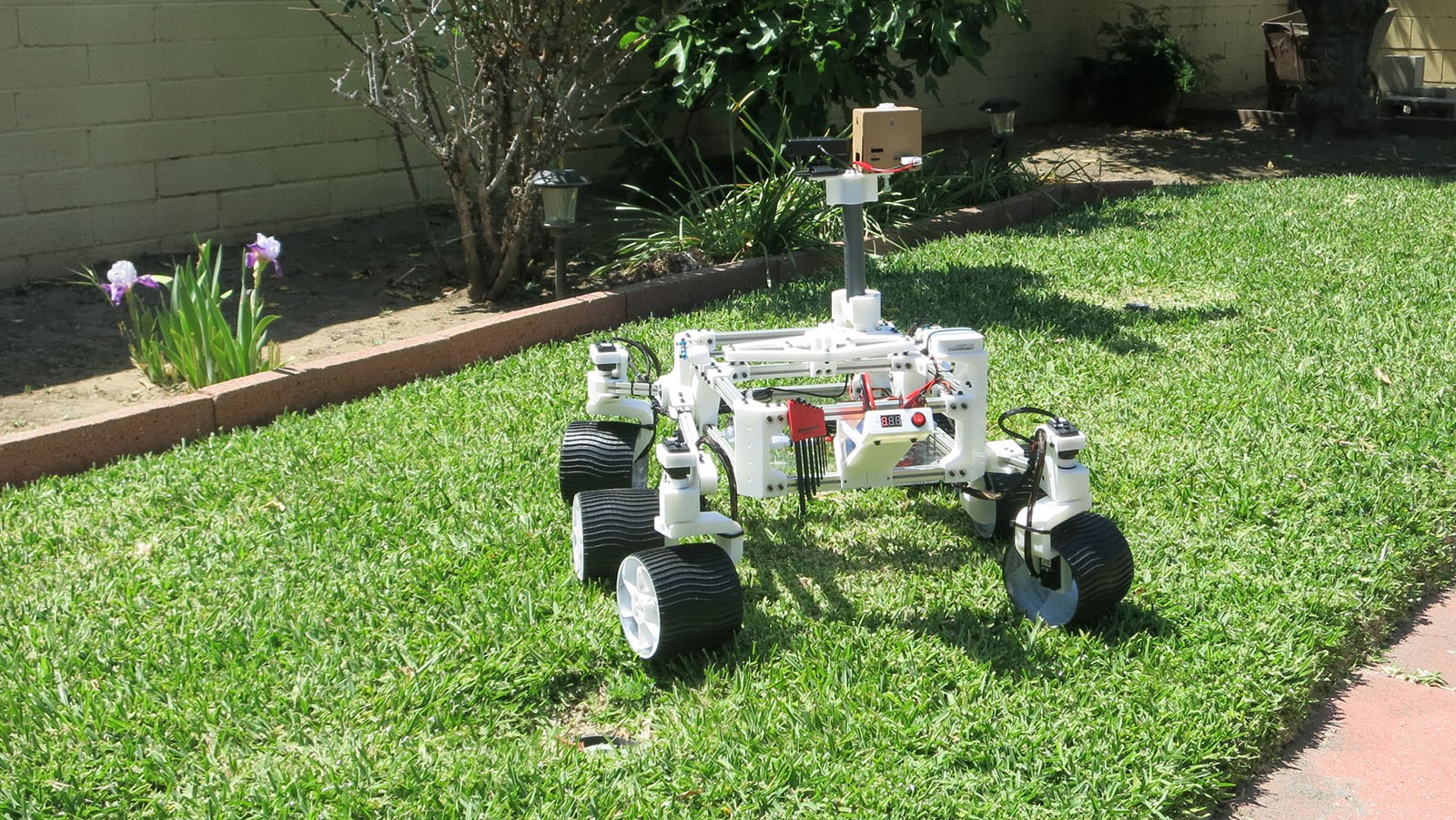
We can see a few challenges in the picture of Sawppy in a back yard environment:
![]()
- Grass is a rough surface that would be very noisy to robot sensors due to individual blades of grass. With its six wheel drivetrain, Sawppy can almost treat grassy terrain as flat ground. But not quite! There are hidden dangers - like sprinkler heads - which could hamper movement and should be considered in path planning.
- In the lower right corner we can see transition from grass to flat red brick. This would show as a transition to robot sensors as well, but deciding whether that transition is important will need to be part of path planning. It even introduces a new consideration in the form of direction: Sawppy has no problem dropping from grass to brick, but it takes effort to climb from brick back on to grass. This asymmetry in cost would need to be accounted for.
- In the upper left corner we see a row of short bricks. An autonomous Sawppy would need to evaluate those short bricks and decide if they could be climbed, or if they are obstacles to be avoided. Experimentally I have found that they are obstacles, but how would Sawppy know that? Or more interestingly: how would Sawppy perform its own experiment autonomously?
So many interesting problems, so little time!
(Cross-posted to NewScrewdriver.com)
-
ROS In Three Dimensions: Data Structure and Sensor
01/16/2019 at 10:10 • 3 commentsOne of the ways a TurtleBot makes ROS easier and more approachable for beginners is by simplifying a robot’s world into two dimensions. It’s somewhat like the introductory chapters of a physics textbook, where all surfaces are friction-less and all collisions are perfectly inelastic. The world of a TurtleBot is perfectly flat and all obstacles have an infinite height. This simplification allows the robot’s environment to be represented as a 2D array called an occupancy grid.
Of course, the real world is more complicated. My TurtleBot clone Phoebe encountered several problems just trying to navigate my home. The real world do not have flat floors and obstacles come in all shapes, sizes, and heights. Fortunately, researchers have been working on problems encountered by robots venturing outside the simplified world, it’s a matter of reading research papers and following their citation links to find the tools.
One area of research improves upon the 2D occupancy grid by building data structures that can represent a robot’s environment in 3D. I’ve found several papers that built upon the octree concept, so that seems to be a good place to start.
But for a robot to build a representation of its environment in 3D, it needs 3D sensors. Phoebe’s Neato vacuum LIDAR works in a simplified 2D world but won’t cut it anymore in a 3D world. The most affordable entry point here is the Microsoft Kinect sensor bar from an old Xbox 360, which can function as a RGBD (red + blue + green + depth) input source for ROS.
Phoebe used Gmapping for SLAM, but that takes 2D laser scan data and generates a 2D occupancy grid. Searching for a 3D SLAM algorithm that can digest RGBD camera data, I searched for “RGBD SLAM” that led immediately to this straightforwardly named package. But of course, that’s not the only one around. I’ve also come across RTAB-Map which seems to be better maintained and updated for recent ROS releases. And best of all, RTAB-Map has the ability to generate odometry data purely from the RGBD input stream, which might allow me to bypass the challenges of calculating Sawppy’s chassis odometry from unreliable servo angle readings.
(Cross-posted to NewScrewdriver.com)
-
Sawppy on ROS: Open Problems
01/13/2019 at 22:28 • 0 commentsA great side effect of giving a presentation is that it requires me to gather my thoughts in order to present them to others. Since members of RSSC are familar with ROS, I collected my scattered thoughts on ROS over the past few weeks and condensed the essence into a single slide that I’ve added to my presentation.
From building and running my Phoebe robot, I learned about the basics of ROS using a two-wheeled robot on flat terrain. Sticking to 2D simplifies a lot of robotics problems and I thought it would help me expand to a six-wheeled rover to rough terrain. Well, I was right on the former but the latter is still a big step to climb.
The bare basic responsibilities of a ROS TurtleBot chassis (and derivatives like Phoebe) is twofold: subscribe to topic
/cmd_veland execute movement commands published to that topic, and from the resulting movement, calculate and publish odometry data to topic/odom.Executing commands sent to
/cmd_velis relatively straightforward when Sawppy is on level ground. It would not terribly different from existing code. The challenge comes from uneven terrain with unpredictable traction. Some of Sawppy’s wheels might slip and resulting motion might be very different from what was commanded. My experience with Phoebe showed that while it is possible to correct for minor drift, major sudden unexpected shifts in position or orientation (such as when Phoebe runs into an unseen obstacle) throws everything out of whack.Given the potential for wheel slip on uneven terrain, calculating Sawppy odometry is a challenge. And that’s before we consider another problem: the inexpensive serial bus servos I use do not have fine pitched rotation encoders, just a sensor for servo angle that only covers ~240 of 360 degrees. While I would be happy if it just didn’t return any data when out of range, it actually returns random data. I haven’t yet figured out a good way to filter the signal out of the noise, which would be required to calculate odometry.
And these are just challenges within the chassis I built, there’s more out there!
(Cross-posted to NewScrewdriver.com)
-
Robotics Society of Southern California (RSSC) January 2019 Meet
01/13/2019 at 08:09 • 0 commentsToday I introduced my rover project Sawppy to members of Robotics Society of Southern California. Before the presentations started, Sawppy sat on a table so interested people can come by for a closer look. My visual aid PowerPoint slide deck is available here.
![]()
My presentation is an extended version of what I gave at Downtown LA Mini Maker Faire. Some of the addition came at the beginning: this time I'm not following a JPL Open Source Rover presentation, so I had to give people the background story on ROV-E, JPL OSR, and SGVHAK rover to properly explain Sawppy's inspiration. Some of the addition came at the end: there were some technical details that I was able to discuss with a technical audience. (I'll expand on them in future updates.)
I was very happy at the positive reception I received for Sawppy. The first talk of the morning covered autonomous robots, so I was afraid the audience would look down at Sawppy's lack of autonomy. Thankfully that did not turn out to be a big deal. Many were impressed by the mechanical design and construction. Quite a few were also appreciative when I stressed my emphasis on keeping Sawppy affordable and accessible. In the Q&A session we covered a few issues that had easy solutions... if one had a metalworking machine shop. I insisted that Sawppy could be built without a machine shop, and that's why I made some of the design decisions I did.
A few people were not aware of Onshape and my presentation stirred their interest to look into it. There was also a surprising level of interest in my mention of Monoprice Maker Select v2 as an affordable entry level 3D printer, enough hands were raised that I signed up to give a future talk about my experience.
(Cross-posted to NewScrewdriver.com)
-
Sawppy Will Be Presented At RSSC
01/11/2019 at 00:50 • 0 commentsI brought Sawppy to the Downtown Los Angeles Mini Maker Faire this past December, where I had the opportunity to give a short presentation about my project. Also at the event were the Robotics Society of Southern California (RSSC) and a few members asked if I would be interested in presenting Sawppy at an upcoming RSSC meeting.
Since I’m always happy to share Sawppy with anyone interested in my little rover, I said yes and I’m on their calendar for the RSSC meeting on Saturday, January 12th. From 11AM to noon, I plan to talk for about 35-40 minutes and leave the remaining time for Q&A and drive Sawppy over obstacles to demonstrate the rocker-bogie suspension.
This group has collective expertise in Robot Operating System, which I’ve been learning on-and-off at a self guided pace. If conversations go in a direction where it makes sense, I’ll be asking my audience for their input on how to best put Sawppy on ROS. I also plan to bring Phoebe, my ROS TurtleBot clone that I built to learn ROS, just for fun.
And I’m sure I’ll see other cool robotics projects there!
(Cross-posted to NewScrewdriver.com)
Sawppy the Rover
Motorized model of Mars rovers Curiosity and Perseverance For Under $500