The kinematics are written in Python/TKInter, and code can be found on GitHub.
The geometrical drawings were made using the browser-based GeoGebra app.
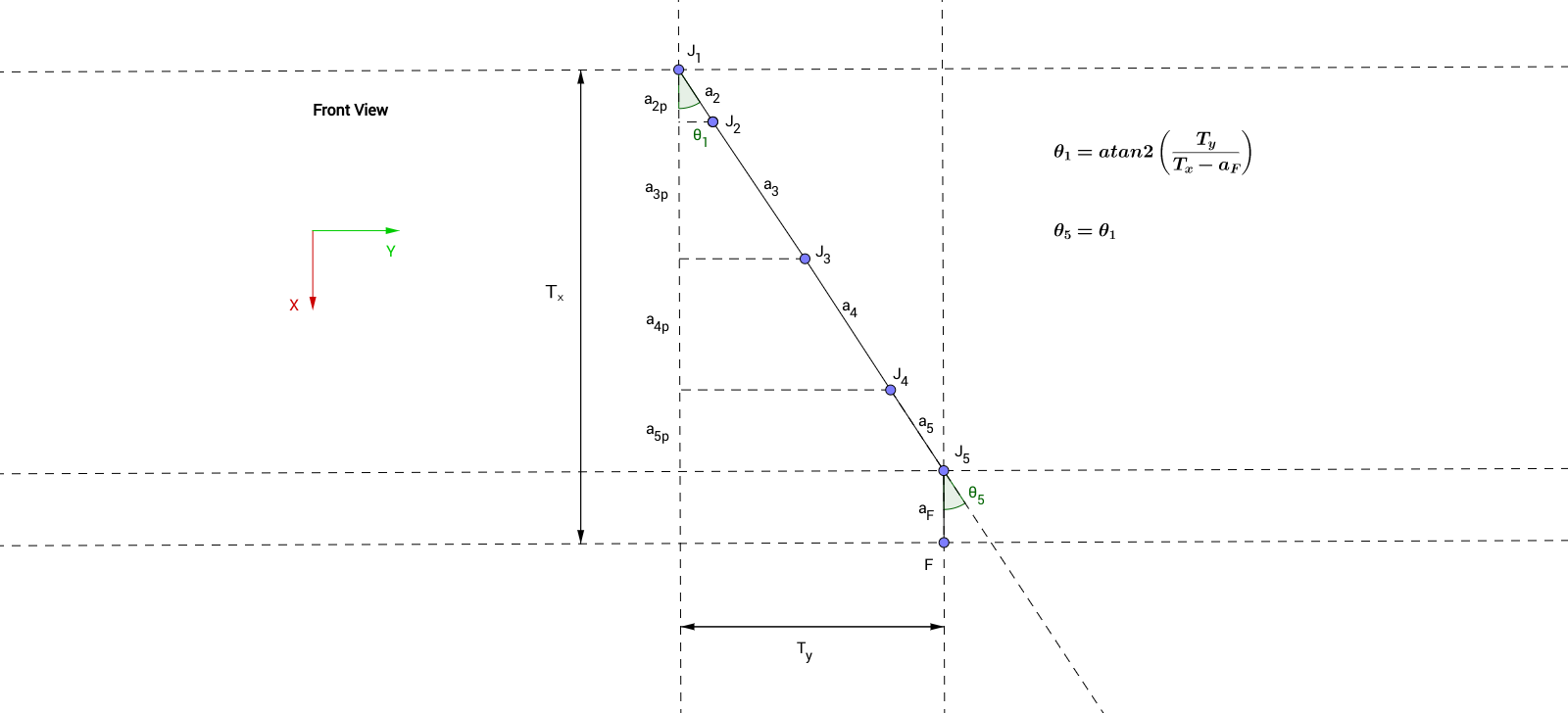
Trigonometry
Trigonometry based on front view
Trigonometry based on side view
Evolution of the Kinematics
Elliptical path test
Quad kinematics gait test
Gait foot pitch test original
Gait foot pitch test adjusted
4
Kinematics Class Diagram
5
Arduino (OpenCM) Serial and Motor Command Code
This Arduino code allows the OpenCM9.04, together with OpenCM 458 Expansion Board, to receive commands via serial from the Python kinematics code, and in turn send the goal positions and speeds to the AX-12 motors.
LegTestRig_OpenCM.ino
#include<string.h>#define DXL_BUS_SERIAL3 3 //Dynamixel on Serial3(USART3) <- OpenCM 485 EXPint numOfJoints = 22;
char cmdBuffer[256];
int bufferCount = 0;
Dynamixel Dxl(DXL_BUS_SERIAL3);
voidsetup(){
// Initialize the Dynamixel bus// Dynamixel 2.0 Baudrate -> 0: 9600, 1: 57600, 2: 115200, 3: 1Mbps
Dxl.begin(3);
// Set joint modefor (int i = 0; i < numOfJoints; ++i)
Dxl.jointMode(i);
// Set compliance
Dxl.complianceMargin(254, 1, 1);
Dxl.complianceSlope(254, 50, 50);
// Home motors
Dxl.setPosition(254, 512, 100);
// Setup serial
SerialUSB.begin();
SerialUSB.attachInterrupt(usbInterrupt);
}
voidloop(){
}
voidusbInterrupt(byte* buffer, byte nCount){
// USB max packet data is 64 bytes, so nCount cannot exceed 64 bytesfor(unsignedint i=0; i < nCount; ++i)
{
char c = (char)buffer[i];
cmdBuffer[bufferCount++] = c;
if (c == '\n')
{
useBuffer(cmdBuffer);
buffer[0] = NULL;
bufferCount = 0;
}
}
}
voiduseBuffer(char *p){
char * pEnd = p;
int x;
int count = 0;
int id[numOfJoints];
int pos[numOfJoints];
int speed[numOfJoints];
// String format: ID POS SPEED repeated until \nwhile ( x = strtol(pEnd, &pEnd, 10) )
{
id[count] = x;
if ( x = strtol(pEnd, &pEnd, 10) )
pos[count] = x;
if ( x = strtol(pEnd, &pEnd, 10) )
speed[count] = x;
count++;
}
for (int i = 0; i < count; ++i)
{
//SerialUSB.println(id[i]);if ( (1 <= id[i]) && (id[i] <= numOfJoints) &&
(0 <= pos[i]) && (pos[i] <= 1023) &&
(0 <= speed[i]) && (speed[i] <= 1023) )
{
//SerialUSB.print("I got id: ");//SerialUSB.println(id[i]);//SerialUSB.print("I got pos: ");//SerialUSB.println(pos[i]);//SerialUSB.print("I got speed: ");//SerialUSB.println(speed[i]);
Dxl.setPosition(id[i], pos[i], speed[i]);
//SerialUSB.println("Sent to AX-12!");
}
}
}
/*
void useBuffer(char *p)
{
char * pEnd;
int id;
int pos;
int speed;
// String format: ID POS SPEED\n
id = strtol(p, &pEnd, 10);
pos = strtol(pEnd, &pEnd, 10);
speed = strtol(pEnd, NULL, 10);
//SerialUSB.print("I got id: ");
//SerialUSB.println(id);
//SerialUSB.print("I got pos: ");
//SerialUSB.println(pos);
//SerialUSB.print("I got speed: ");
//SerialUSB.println(speed);
if ( (1 <= id) && (id <= numOfJoints) &&
(0 <= pos) && (pos <= 1023) &&
(0 <= speed) && (speed <= 1023) )
{
Dxl.setPosition(id, pos, speed);
//SerialUSB.println("Sent to AX-12!");
}
}
*/
Note: A (out-of-date) version of the code, targeting the Arbotix-M, can be found here: LegTestRig.ino.
6
Python Timed Operations Thread
Here is an example I figured out, of how to create a Python class to run a function in a separate thread, with a defined time interval, that is pausable/stoppable. It subclasses the Thread class, and uses the help of an Event object to handle the timing functionality. After creating an object of this class, you call its start() method, which invokes the run() method in a separate thread. The pause(), resume() and stop() methods perform the respective actions. The example is a stripped-down version of an input handler, which applies the equations of motion to user inputs, that I created as part of the kinematics code.
Input Handler Example
import threading
from time import time
import math
classInputHandlerExample(threading.Thread):def__init__(self):
# Threading/timing vars
threading.Thread.__init__(self)
self.event = threading.Event()
self.dt = 0.05# 50 msself.paused = False
self.prevT = time()
self.currT = time()
self.target = 0.0self.speed = 0.0# Input varsself.inputNormalised = 0.0defrun(self):
whilenotself.event.isSet():
ifnotself.paused:self.pollInputs()
self.event.wait(self.dt)
defpause(self):
self.paused = True
defresume(self):
self.paused = False
defstop(self):
self.event.set()
defpollInputs(self):
# Upate current timeself.currT = time()
# Get user input somehow here, normalise value#self.inputNormalised = getInput()# Update target and speedself.target, self.speed = self.updateMotion(
self.inputNormalised, self.target, self.speed)
# Make use of the returned target and speed values#useResults(target, speed)# Update previous timeself.prevT = self.currT
defupdateMotion(self, i, target, speed):
m = 1.0
u0 = speed
# Force minus linear drag
inputForceMax = 1000
dragForceCoef = 5
F = inputForceMax*i - dragForceCoef*u0
a = F/m
t = self.currT - self.prevT
# Zero t if it's too largeif t > 0.5:
t = 0.0
x0 = target
# Equations of motion
u = u0 + a*t
x = x0 + u0*t + 0.5*a*math.pow(t, 2)
return x, u
 Dimitris Xydas
Dimitris Xydas

 Elliptical path test
Elliptical path test Quad kinematics gait test
Quad kinematics gait test Gait foot pitch test original
Gait foot pitch test original Gait foot pitch test adjusted
Gait foot pitch test adjusted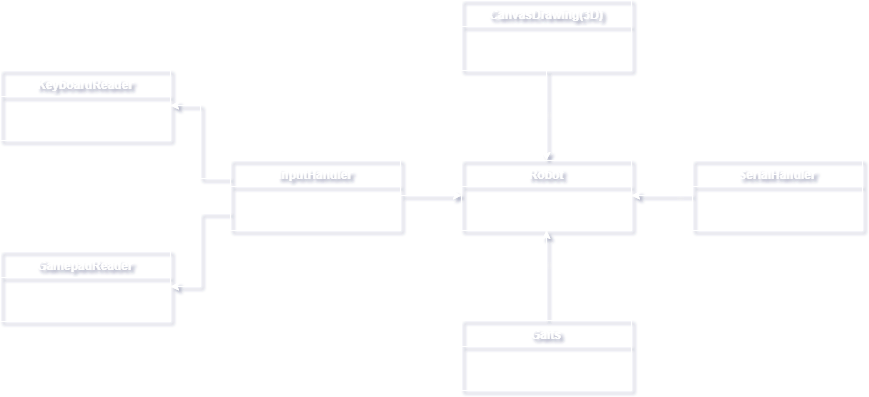



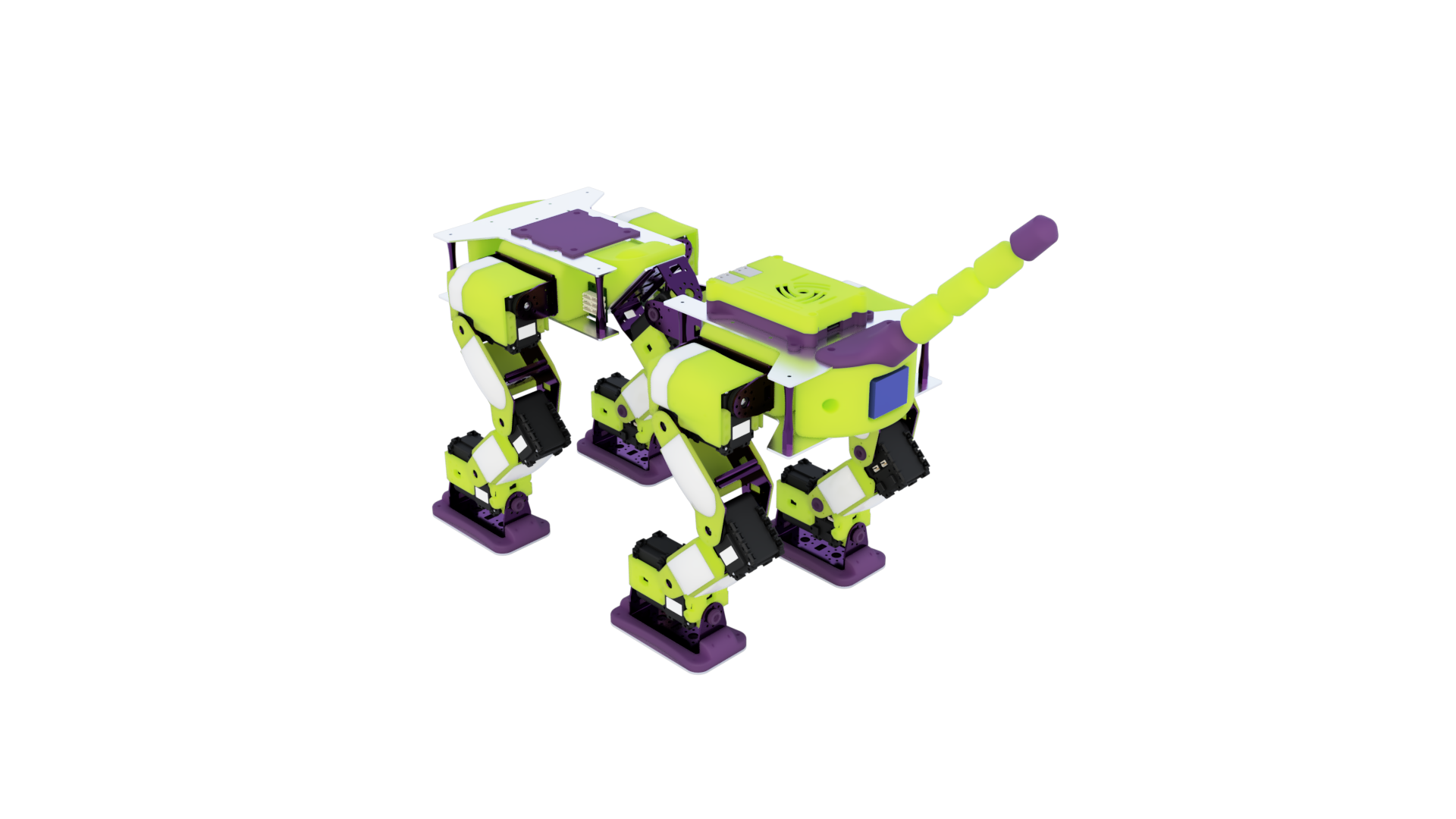
 'Minty' colour scheme
'Minty' colour scheme

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.