 Michael Mayer
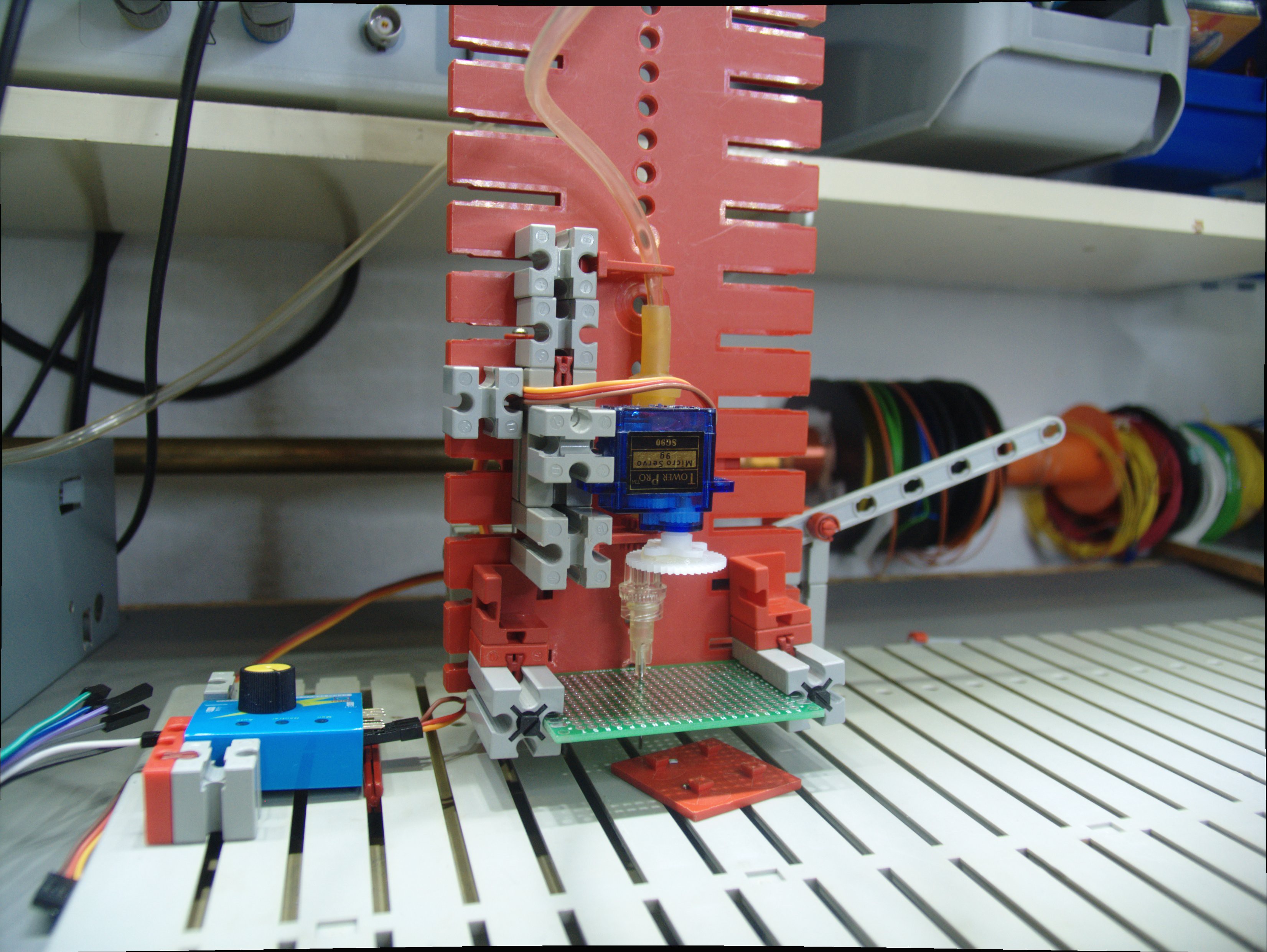
Michael Mayercurrent status: 3D-printed first prototype. Result better than expected, maybe even usable. Working on a simple control logic now.
0%
0%
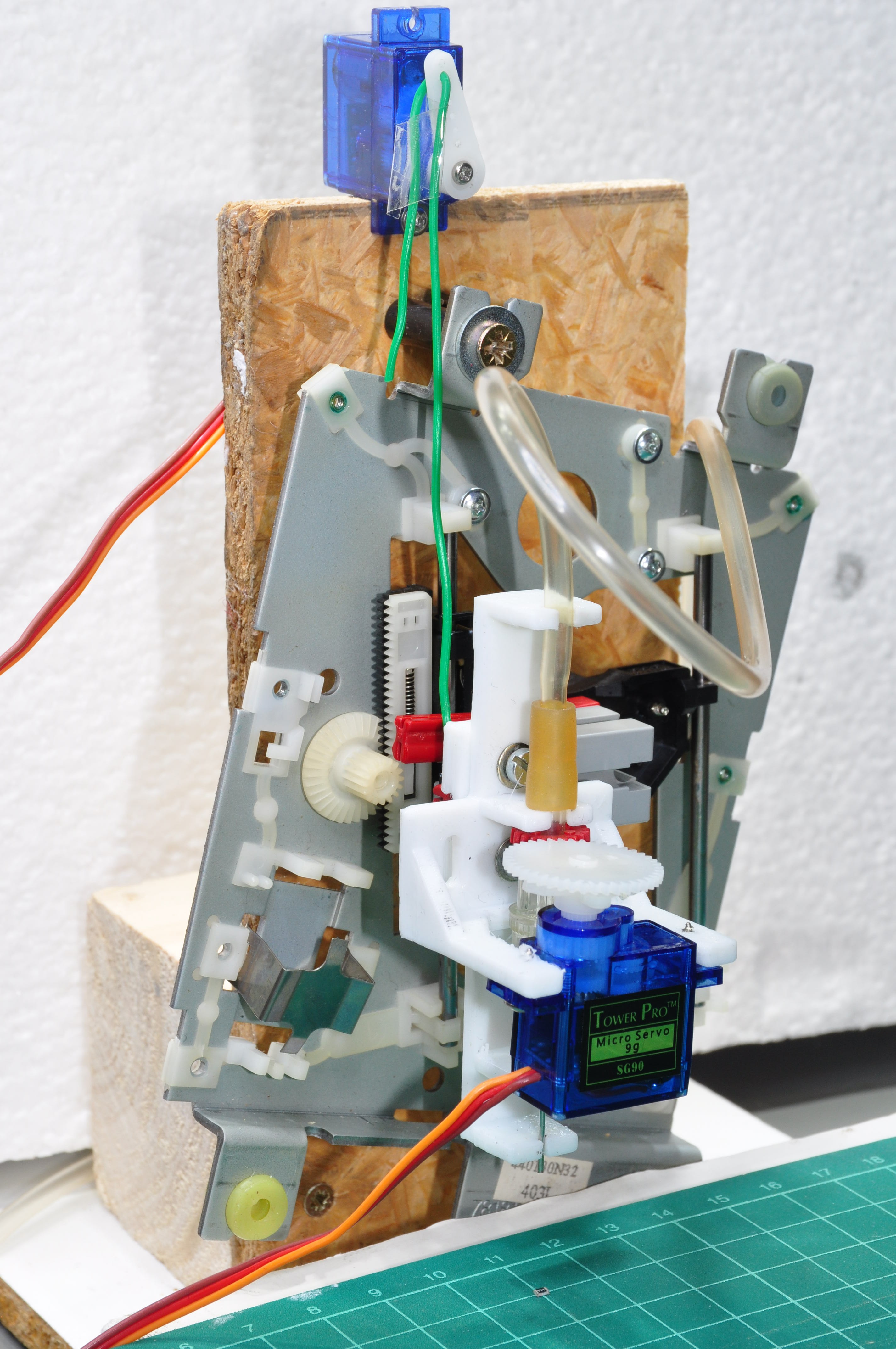
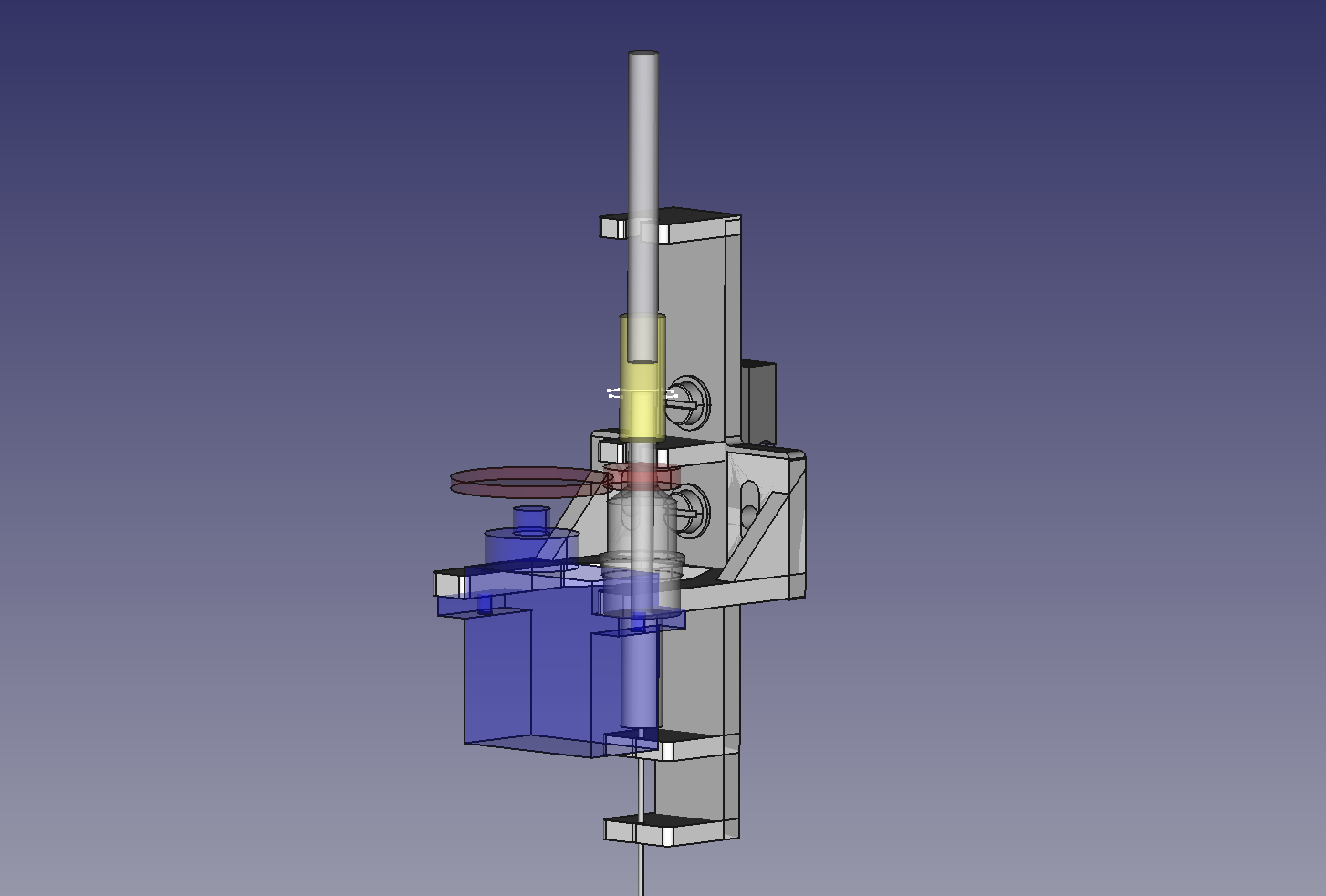
simple pick-and-place head
A study for a simple pick-and-place head using a servo and an injection needle instead of a hollow-shaft stepper motor and a standard nozzle
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
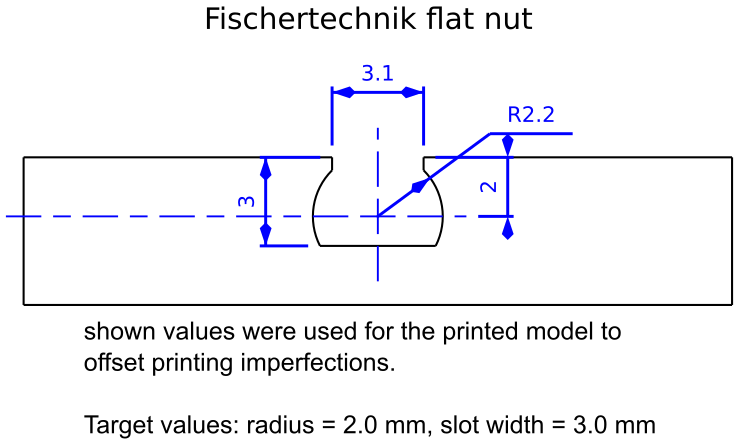
Just fro me to be sure : from yours description : "I expected small misalignments and added 1/2 teeth pitch (~0.8mm at M0.5)" >> misalignment s is distance between center of servo and center of rail ?
I found that backlash at cheap Chinese cheap gears is about 1 - 0.5 degree.
I am just curious : on yours 3D printer , when you make components like this , how precisely they can me made??
I am planing to buy my 3D printer , any recommendation from point of tolerance of product??
thanks
ivo