 Alfonso Troya
Alfonso TroyaThe IMcoders are working as expected, we still need to work on the stability of our Bluetooth link, but the results look promising.
Now it's time to test some extra functionalities. We will try to analyze the output of the sensors to detect if the chair is drifting or blocked.
This tests will show us if the sensors could be used to expand the functionalities of a traditional encoder or if even having three different sensors inside an IMcoders these measurements are out of the capabilities of the system, let's see!
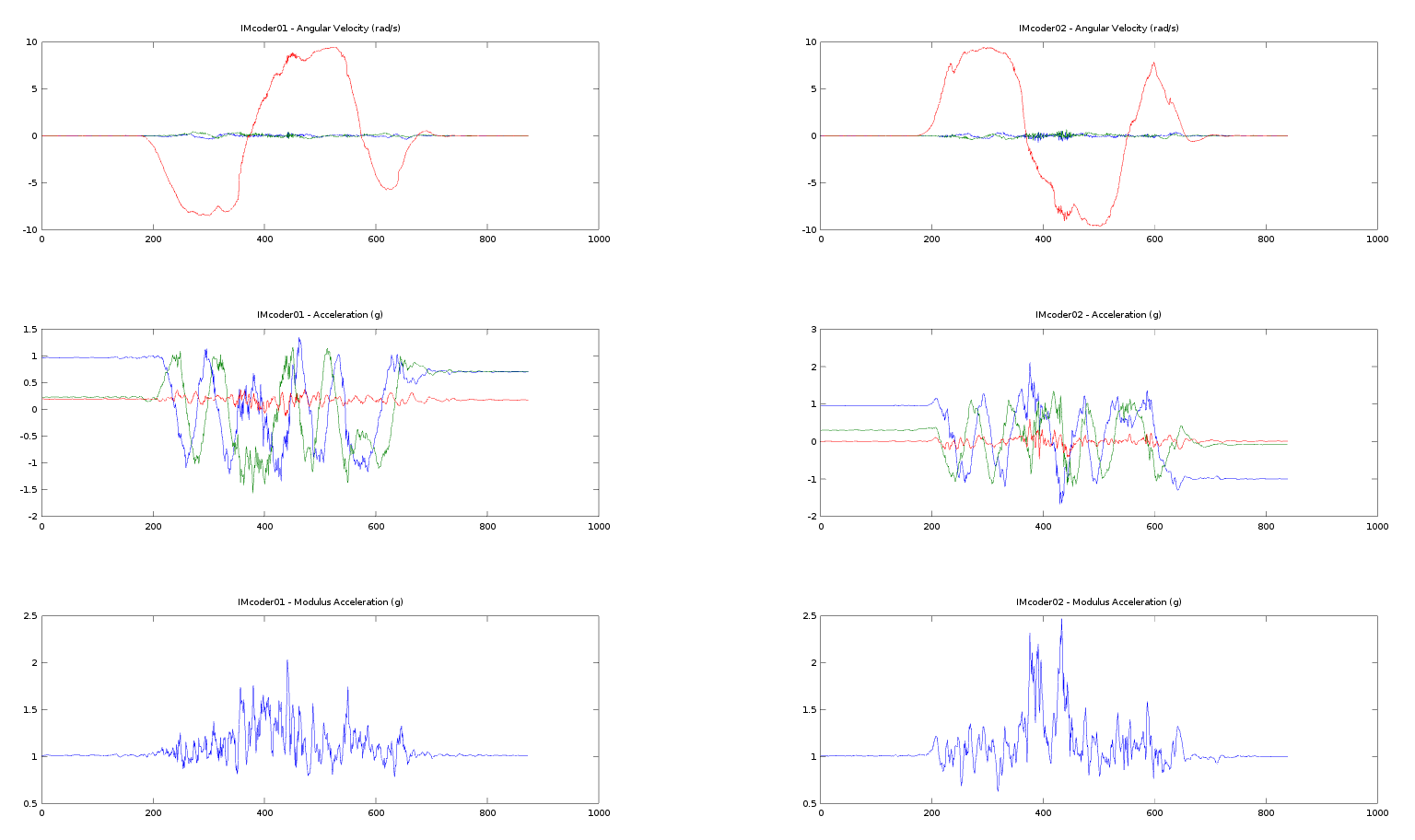
In first place we will force a sudden change of direction while the Wheelchair is going forward to make the wheels to drift.
With a little bit of help from Octave we can visualize the output of the sensors while the Wheelchair is drifting. We can observe high output values from the accelerometer just when the wheel change the direction of rotation. This values match in time when the wheel is stopped and vibrating against the floor because of the drifting.
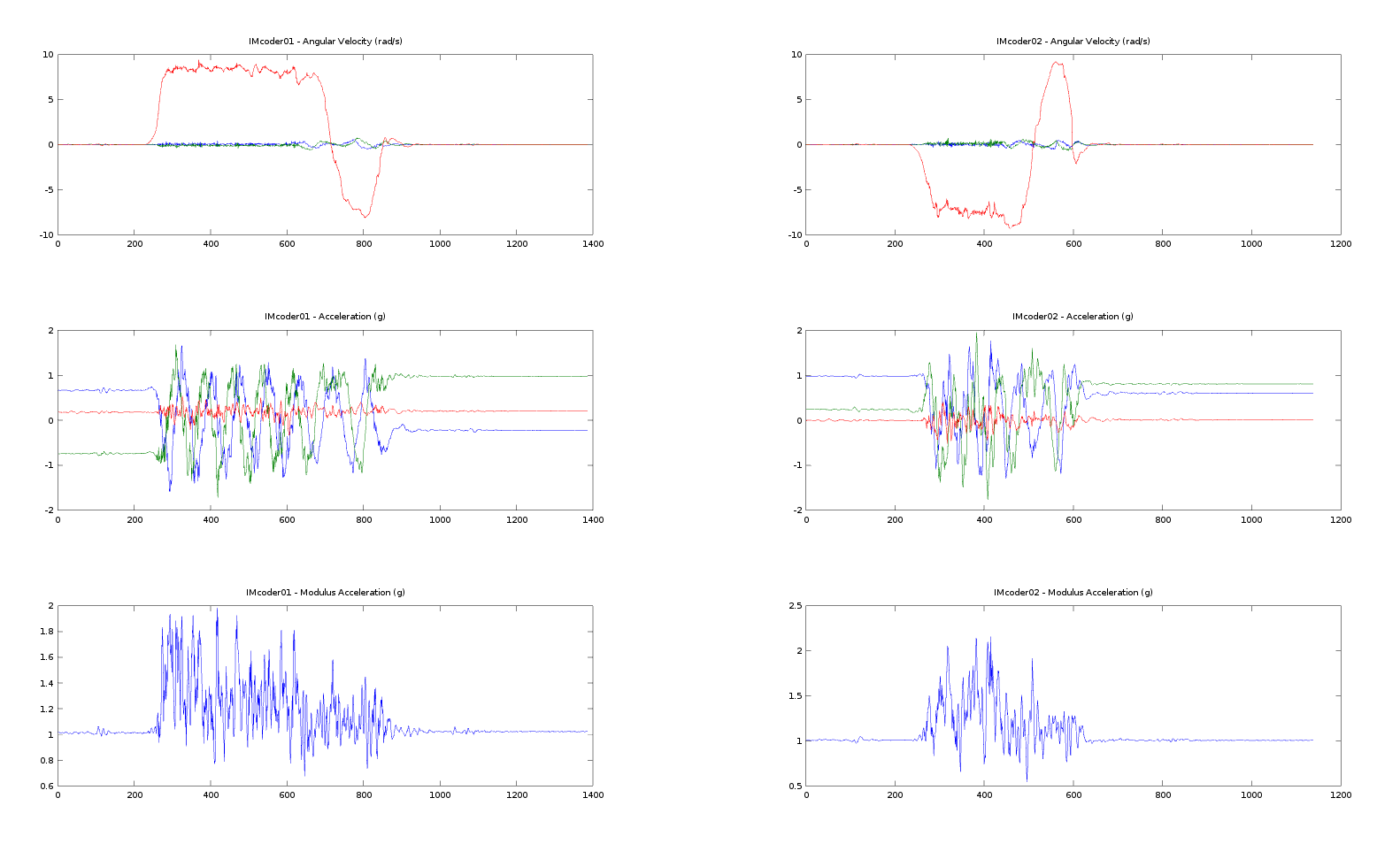
Now we completely block the chair and release it after a few seconds.
The waveform of the sensor output look quite different, we appreciate much higher acceleration values while the wheel is spinning as it is trying to push the obstacle out of its way.
Develop an algorithm able to detect this behavior in all circumstances is a big engineering effort, and unfortunately we have no more time to spend here. We see that there is a clear difference and it seems feasible to detect this two events, but further work is needed to achieve reliable results.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.