 Innovart
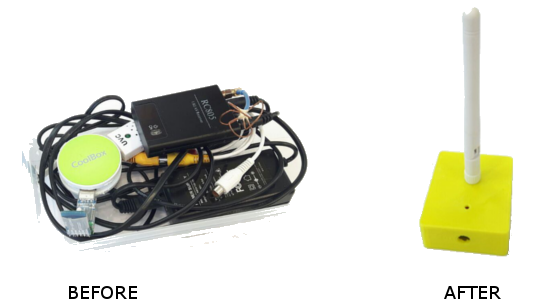
InnovartAnd that is how we created Low-Cost Robot Vision Module, a module which summarizes the system that processes the images taken by the robot and, at the same time, allows the communication with him.
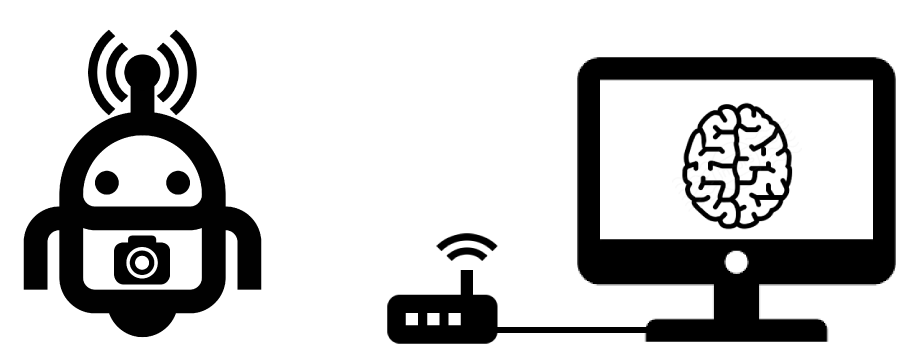
Nowadays, the modules take the images in a digital way thanks to small cameras or webcams, which means that every robot must have a tiny computer in order to process the images; the costs are incremented, or the robot must be connected with a wire to an external computer. In conclusion, every robot needs both a computer and a digital camera.
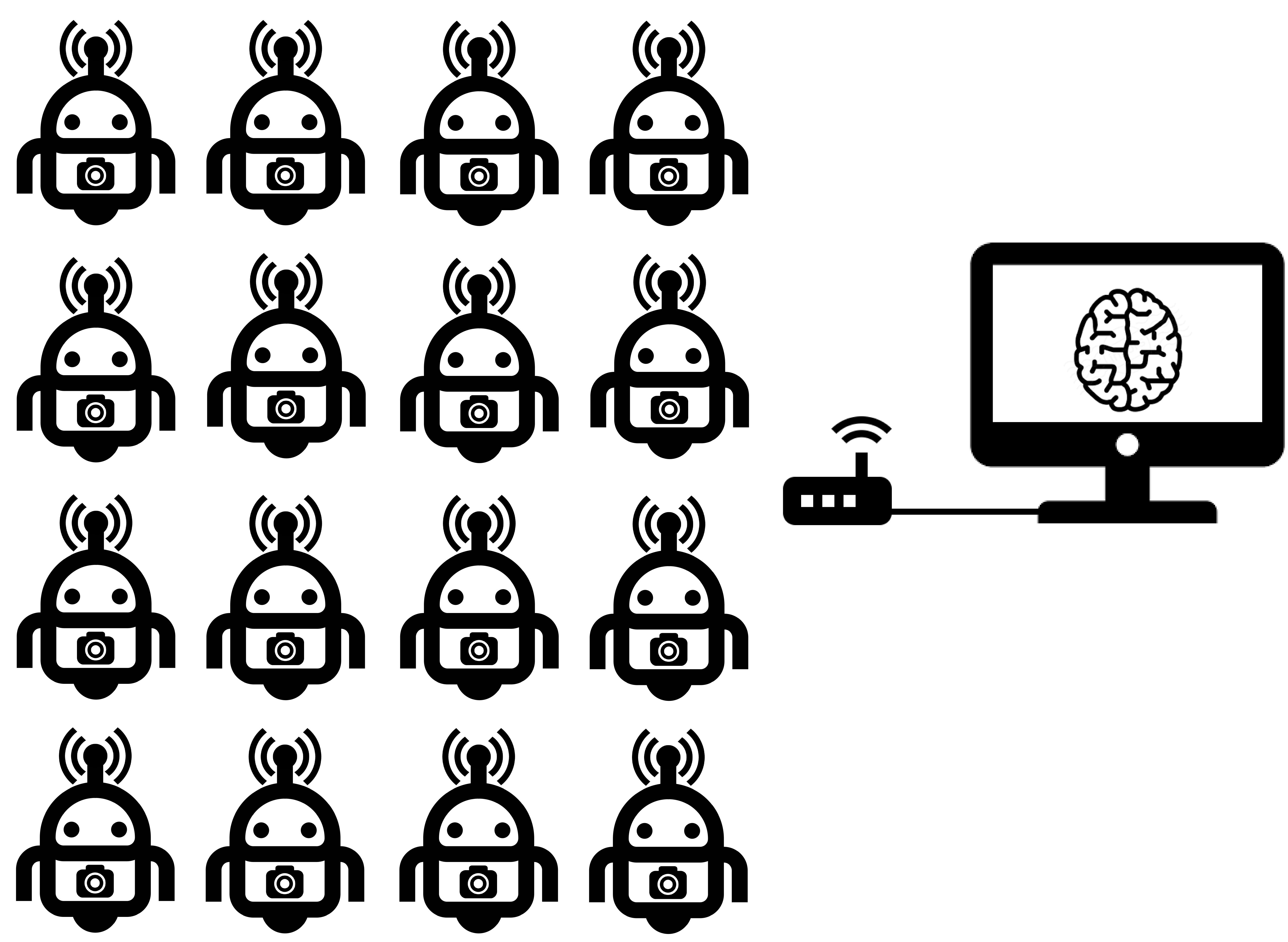
On the other hand, we work with a different technology: the image taken by the robot is sent to our module with no wires (wireless!!!) and after that, the module quickly digitalizes with nothing more than a few tenth of latency. Furthermore, this system allows the user to control 16 robots at the same time because of the fact that the computer can switch automatically the channel of processing, selecting in every moment the signal we want to work with.
Give All the Robots Eyes to See!
The costs of the implementation are less than 20$, which can be translated into an efficient and accessible system. Adding computer vision is now flexible and simple.
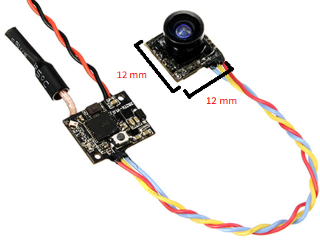
It is the best way to add a camera to any robot
It is possible to configure the power of the emitter: if it is correctly made, we would be able to control our robots more than 100 m away in open environments.

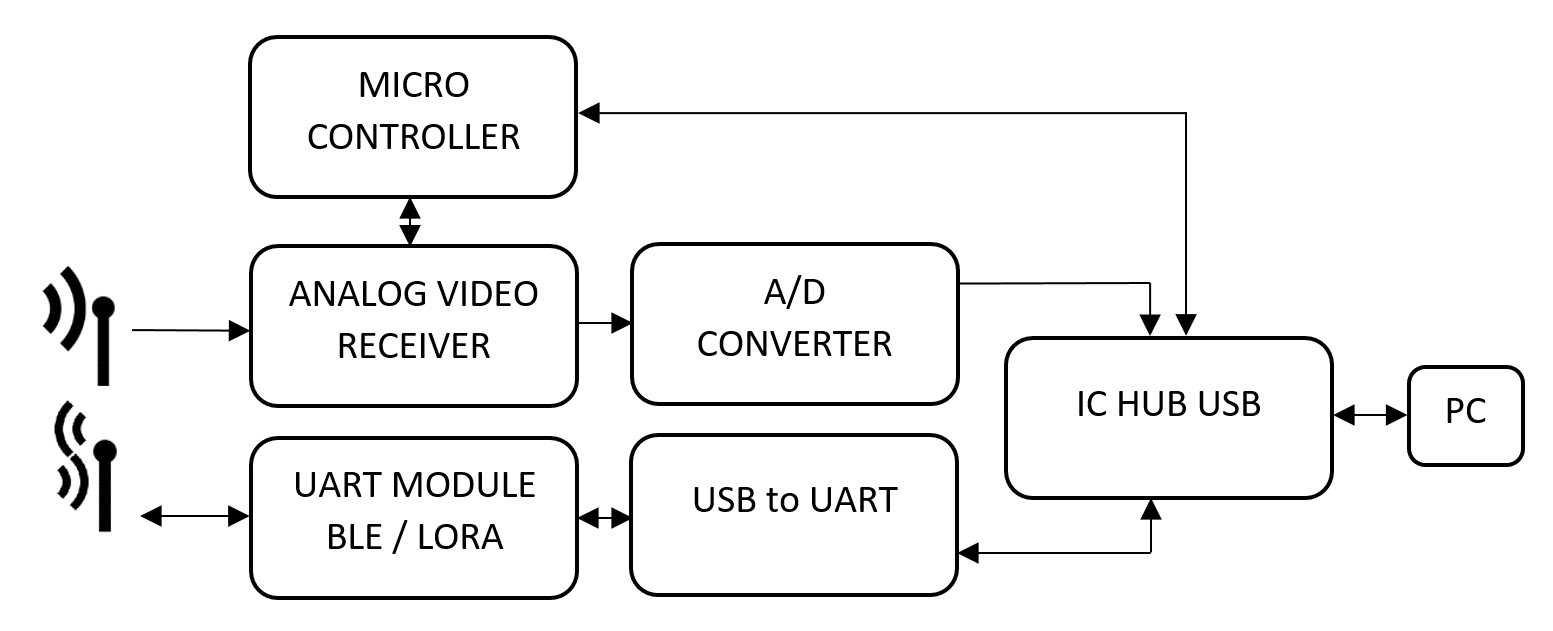
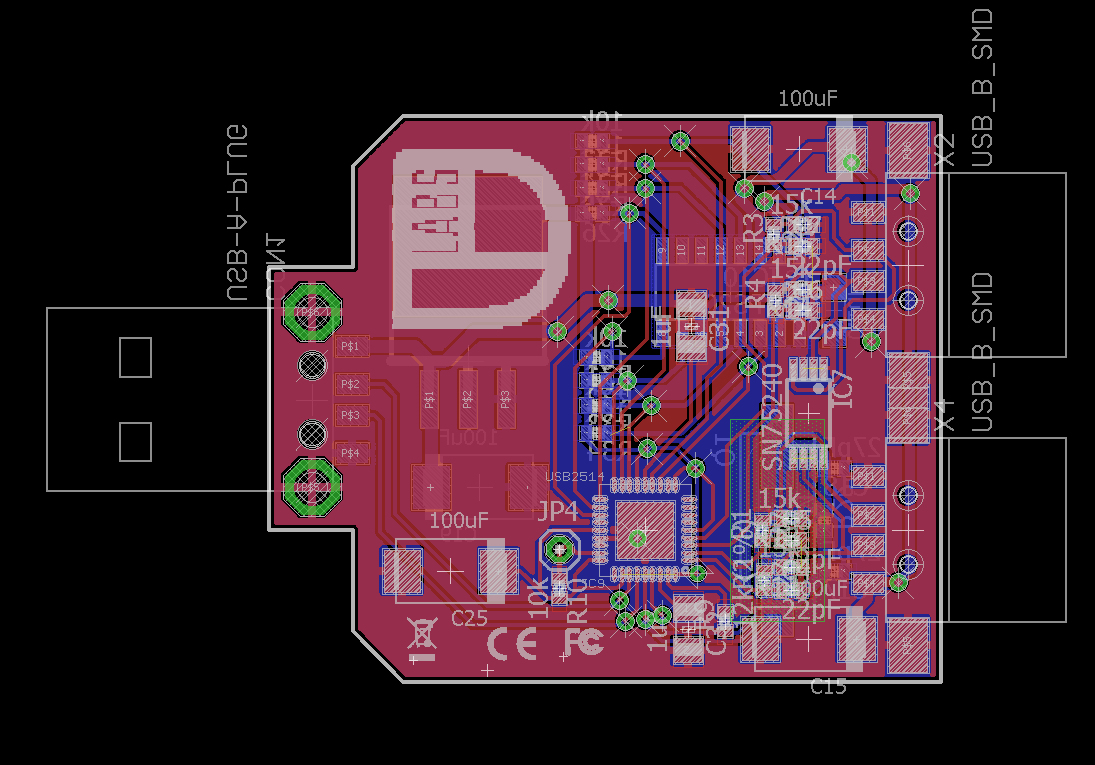
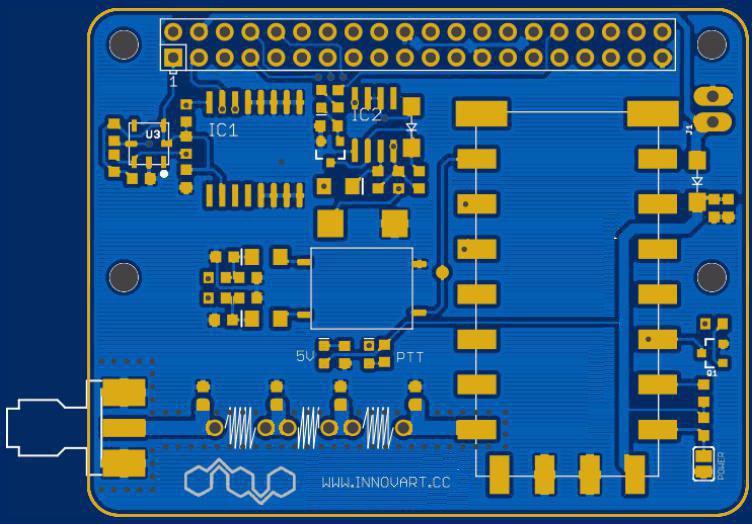
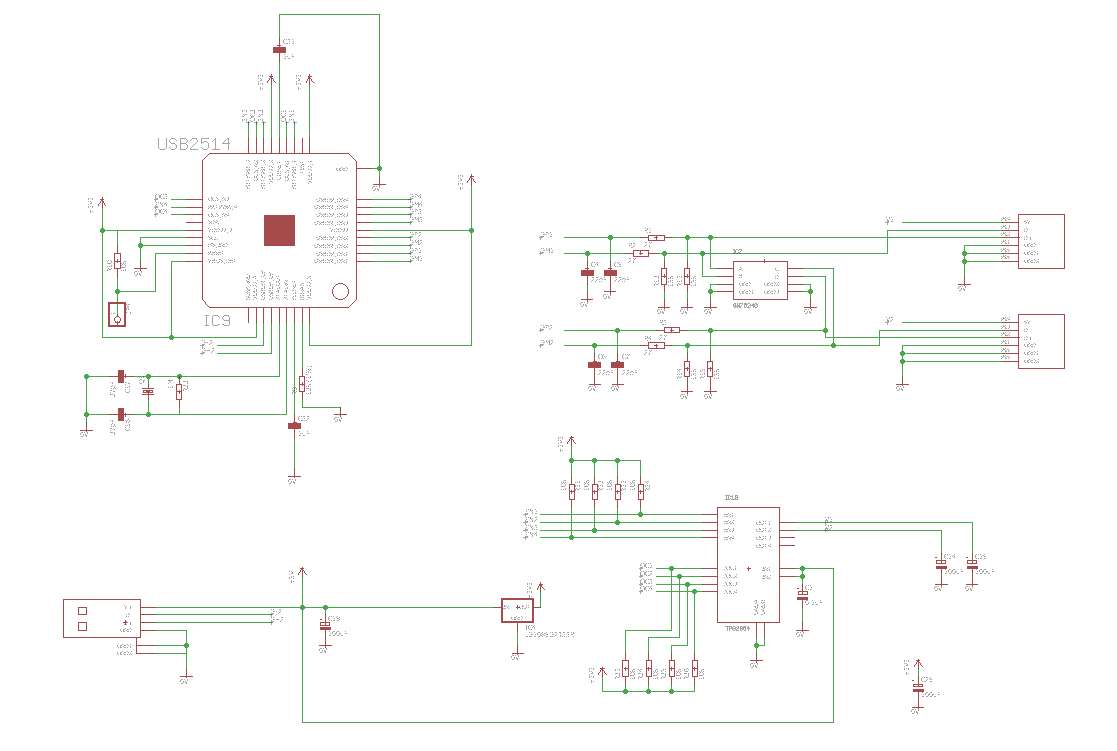
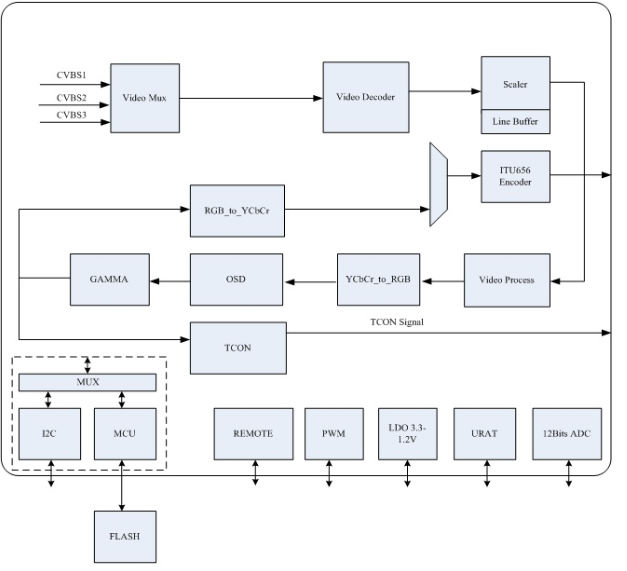
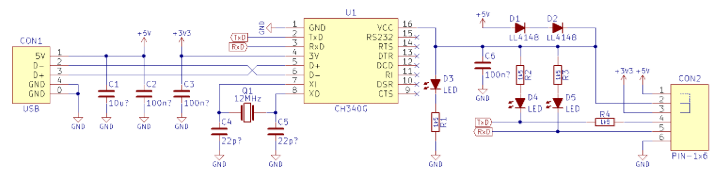
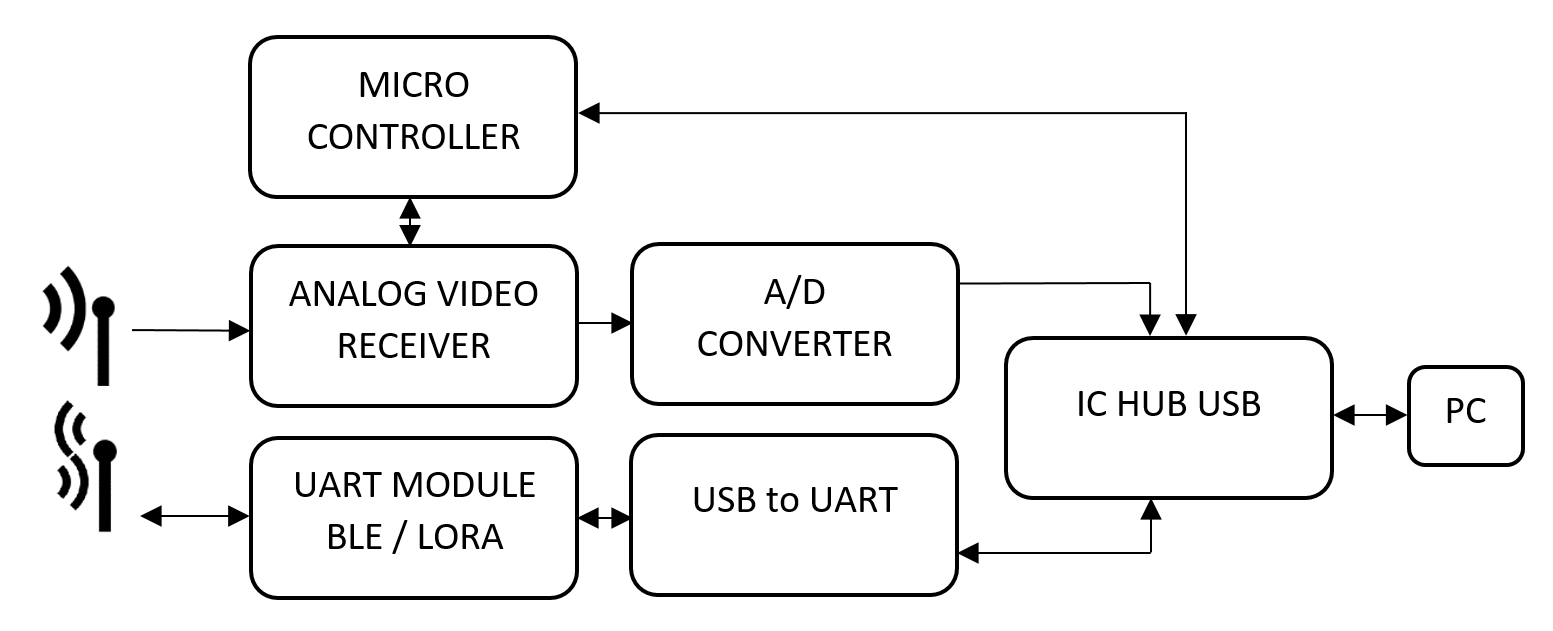
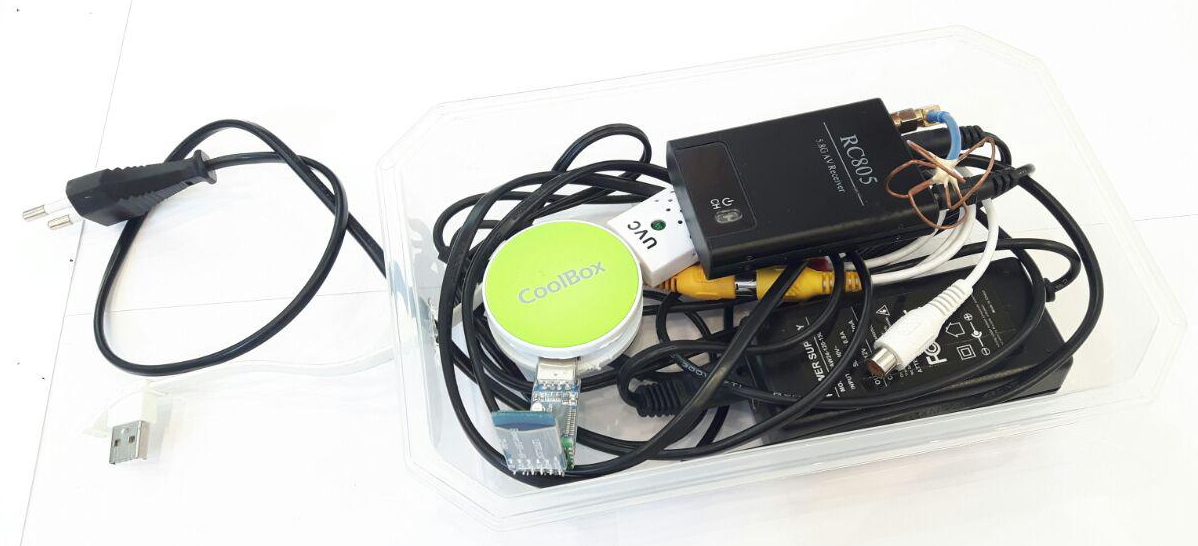
This is how the system works: throughout the microcontroller, the module is synchronized with the PC in the desired channel. Once we collect the image, the Analog-to-Digital block digitalizes the image, like a webcam. At the same time, the USB-UART module allows the bidirectional communication between robots.
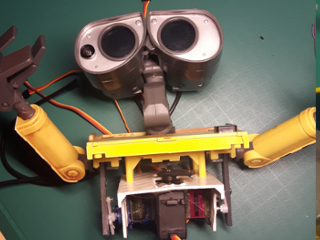
We can process the image from the robot with any program because, in the end, the device works like a webcam. In this case, we use Processing and a library from OCV. The idea is working with the examples of the library, recognizing faces quickly. Nowadays this system has been built in our robot Wall-e, tracking faces with no difficulties.
Without change there is no improvement, this is the evolution of our idea
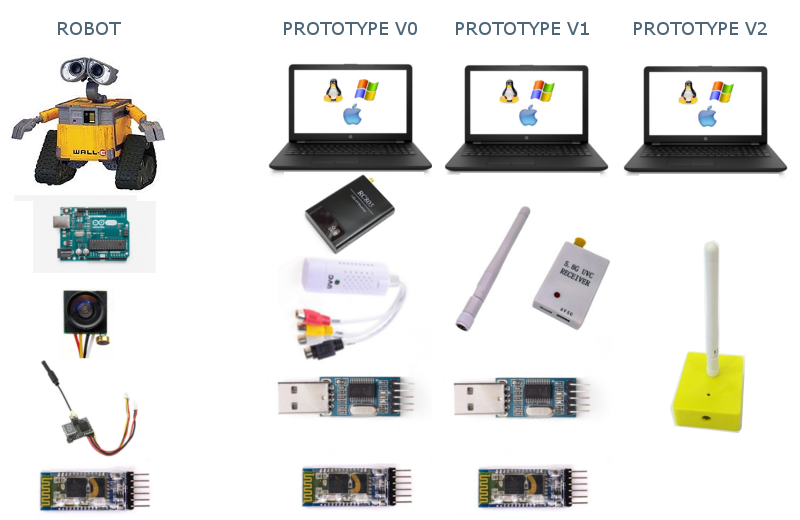
We are working on the latest model with the following features:
-AIO system module
-Compatible with any UART communication module
-On-screen control
-Control of channels by UART communication
-Capacity of control up to 16 robots
-USB DC supply
-Compatible with any operating system
To conclude, the way these device works allows the user to add computered vision in a simple way with no needs of expensive or powerful components, making possible the idea of artificial vision in every robot!.










 Norbert Heinz
Norbert Heinz
 Alberto
Alberto
 BTom
BTom
 Kartik Tiwari
Kartik Tiwari