 Wes Freeman
Wes FreemanThis was a university project for my Robotics degree at UWE Bristol, UK. My aim was to see if Mekamon could be adapted cheaply to be used in education. I’ve just finished the degree but I’m interested in continuing this project or seeing other people pick it up as there’s a lot of ideas I didn’t have time to complete or even try.
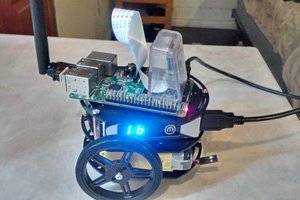
The project as it is does not damage, or change, anything on the robot; it’s a stack of parts that simply zip-ties on top of it.
I have uploaded example code and the .STL files for the printed parts.
I have a ton of notes on the problems I encountered and can add details if anyone needs them.
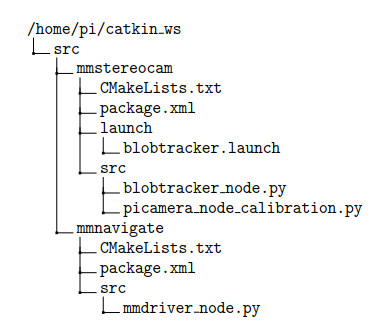
As the design changed over time there’s effectively 2 main versions of this project with different levels of complexity:
Simpler & cheaper:
- Raspberry Pi 3
- Single standard Pi camera
- Python + OpenCV + Bluefruit BLE library
- Great for doing ball-following demo
More complex:
- Pi CM3 Lite + official breakout board (which is ~£100 alone)
- Dual pi-compatible cameras of better quality than the standard one.
- ROS install, allows much more sophisticated stuff.
Clearly, it’s not a mature design but an experimental setup that you would adapt to suit. If you just need one camera you might be ok with a Pi Zero, which could allow you to mount the computer on the gimbal head, making it much smaller and avoiding the awkward FFC ribbon cables. (I will try this if I get monocular visual odometry working.) Or you might not need the stabilising gimbal at all, or use different sensors, different computer and so on.
The main thing with this project is it shows the Mekamon can be hacked!
Update: Someone I know is releasing an alternative to the official CM3 board, it's way smaller and very cool. Check it out here: http://stereopi.com/



 Brenda Armour
Brenda Armour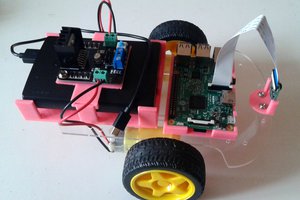
 mikrotron
mikrotron
 rkrishnasanka
rkrishnasanka
Congrats at getting a job there!
https://mekamon.com/blog/we-liked-this-guys-mekamon-mod-so-much-job
Question: Is there an easier way now with v2 to control it via bluetooth & raspberry pi?