 Dennis
Dennis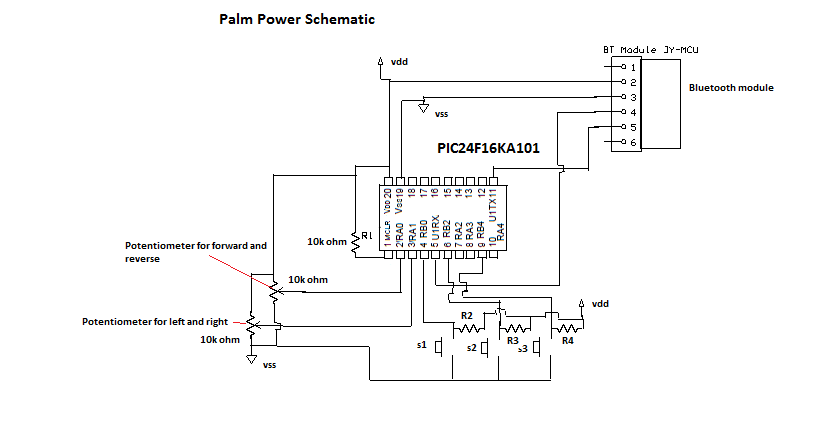
A PIC24F16AK101 is Palm Power’s controller. The Potentiometers with the off-set weights on their shafts are connected to the PIC’s analog-to-digital converter through RAO and RA1. Three switches are connected to the PIC through RB0, RB2 and RB4. The PIC24F16AK101 reads the values of the potentiometers and the switches, builds the data into a string and sends the string to the robot via the Bluetooth module each time the robot requests the data.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.