 Emmanuel Lecomte
Emmanuel Lecomte(This project is just starting)
What I expect to use for my first release :
- Standard Hexapod frame kit => ~ 60€ with servo Horns
- Standard MG995 servo (18 / 20) => Not the standard servo you usually find for this kind of kit but it is actually compliant. Not sure if it will be enough, but I want to try with this servo model. You can find them at 2.70 € for example, so frame + servos can be bought for ~ 120€ (2 time less than standard kit
- ESP8266 or ESP32 as MCU. I'm a big fan of ESP8266 and I want to try to work with ESP32. We will see where it will go. Maybe I will try to use instead a Rpi W Zero if I need more CPU power. In all case, the hexapod will have Wifi
- Servo drivers => I will start with standard I2c 16xPWM board (x2)
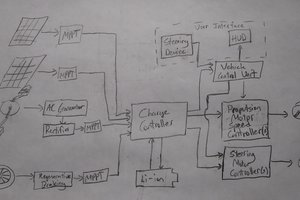
- Power management => Working on it. I'm a total newbie in electronic (even if I studied it years ago, shame on me :-/) and I'm still looking for a solution. I wanted to use some basic C type bateries but as the servos can use almost 1A each at full load, it's too much power for alkalines batteries. So I will use LiPo, but I'm still looking for a something that can go inside the hexapod body. I will probably use 2*3.3 or 1*7.4 battery, so I will need 1 or 2 bulk adapters able to provide 6V for servos with a lot of amps + one small 5V Bulk adapter for the MCU
- Sensors : At least 2 HS (HC-SR04) sensors, 1 PIR, probably 1 camera (starting with a cheap serial camera) 1 Gyroscope
- Probably also 1 buzzer and 1 LCD Screen. I like to put screens everywhere :-), you don't ?
- Some space for extensions !
Of course it will be compliant with my Wifi remote (see other projects)
The idea for me is to build first a driving electronic with cheap and standard boards / modules, and then to try to create my own PCB. I have not created any PCB yet so this project will also be a training for me.
Electronic here is standard, because I'm not an electronic guy for now. But I'm a programmer so I will work more on code. Everything will be published on Github
 Brian Gilbert
Brian Gilbert
 M.daSilva
M.daSilva
 Bob Baddeley
Bob Baddeley
 deʃhipu
deʃhipu