 Brandon
BrandonHey everyone!
So the first boards we designed were an internal development board of sorts. Initial specifications:
- Breaks out connections for 5 cameras (including 2 Raspberry Pi connectors)
- Has SD-Card, emmc, SPI-flash and a bunch of other things we probably don't need, but we figured we'd break out in case we want to develop for them on a future product/functionality (without having to order new boards)
- Has connectors for our dual-camera module (for disparity-depth)
The renderings of these are in the previous post... but now we have working boards, so for some pictures!


So the first thing we did was run hello world via JTAG... and it worked!

I studied German at one point, so now I like to do 'Hello World' in German instead. ^
Then, we went ahead (gasp!) and tried out to see if the image sensors all worked properly:
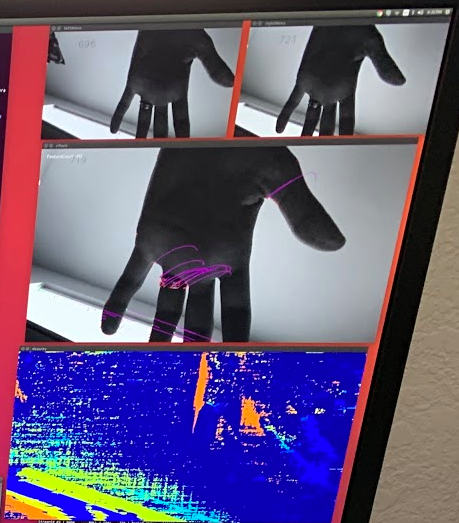
And they totally did. Above you can see (uncalibrated) stereo disparity depth and also feature tracking.
So the next thing we're working on is making a module for the Myriad X... as we (re)discovered how pricey boards of this caliber are when you do low quantities.
So the module will allow us to do a variety of different form-factors, hosts (e.g. Raspberry Pi Compute Module, Toradex NXP i.MX8 Computer on Module, etc.) that the Myriad X can pop into.
Cheers!
- The Luxonis Team
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Thanks!
Are you sure? yes | no
Congrats!
Are you sure? yes | no