 michal.nand
michal.nandRobot hardware
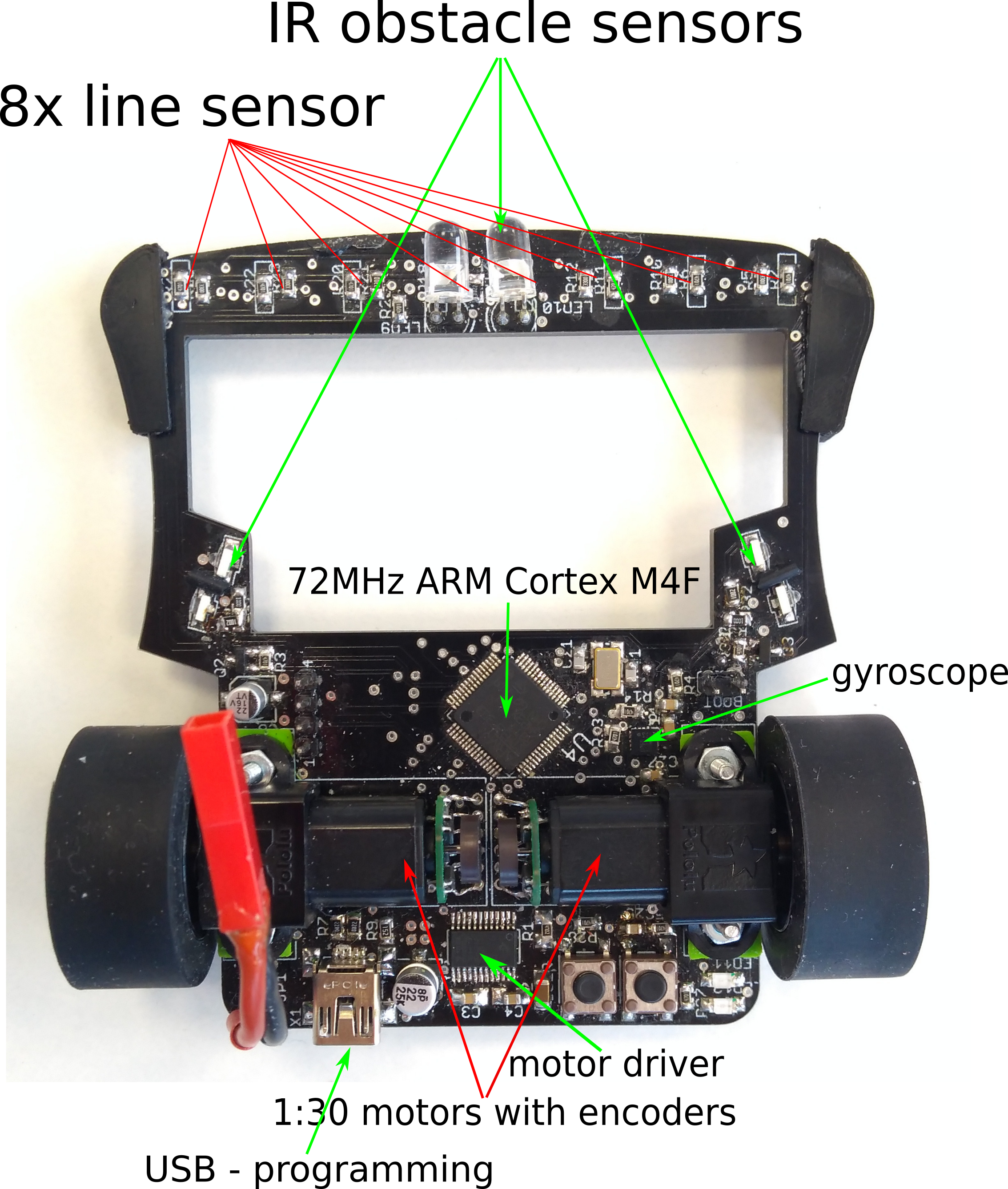
- cortex m4f mcu, 72MHz, stm32f303
- motor driver TI drv8834
- pololu HP motors 1:30 with magnetic encoders
- pololu 28mm tyres, high adhesion
- IMU (gyro + accelerometer) LSM6DS0
- 8 line sensors sensitive for green light (540nm), 3 IR obstacle sensors
- 180mAh LiPol 2S acu
- USB programming via bootloader
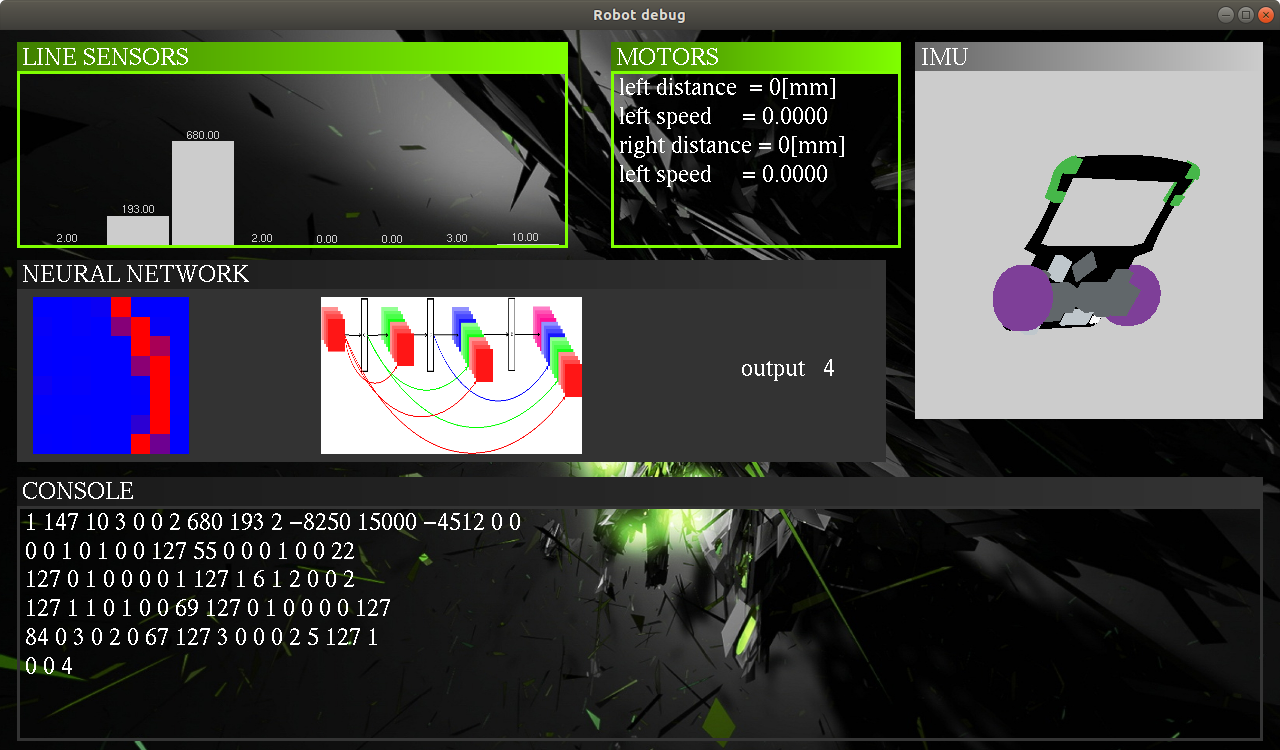
opengl debug application
I created user friendly debug application, showing :
- line sensor raw data
- motors status - speed, encoders
- IMU
- neural network classification process
- raw data from USART
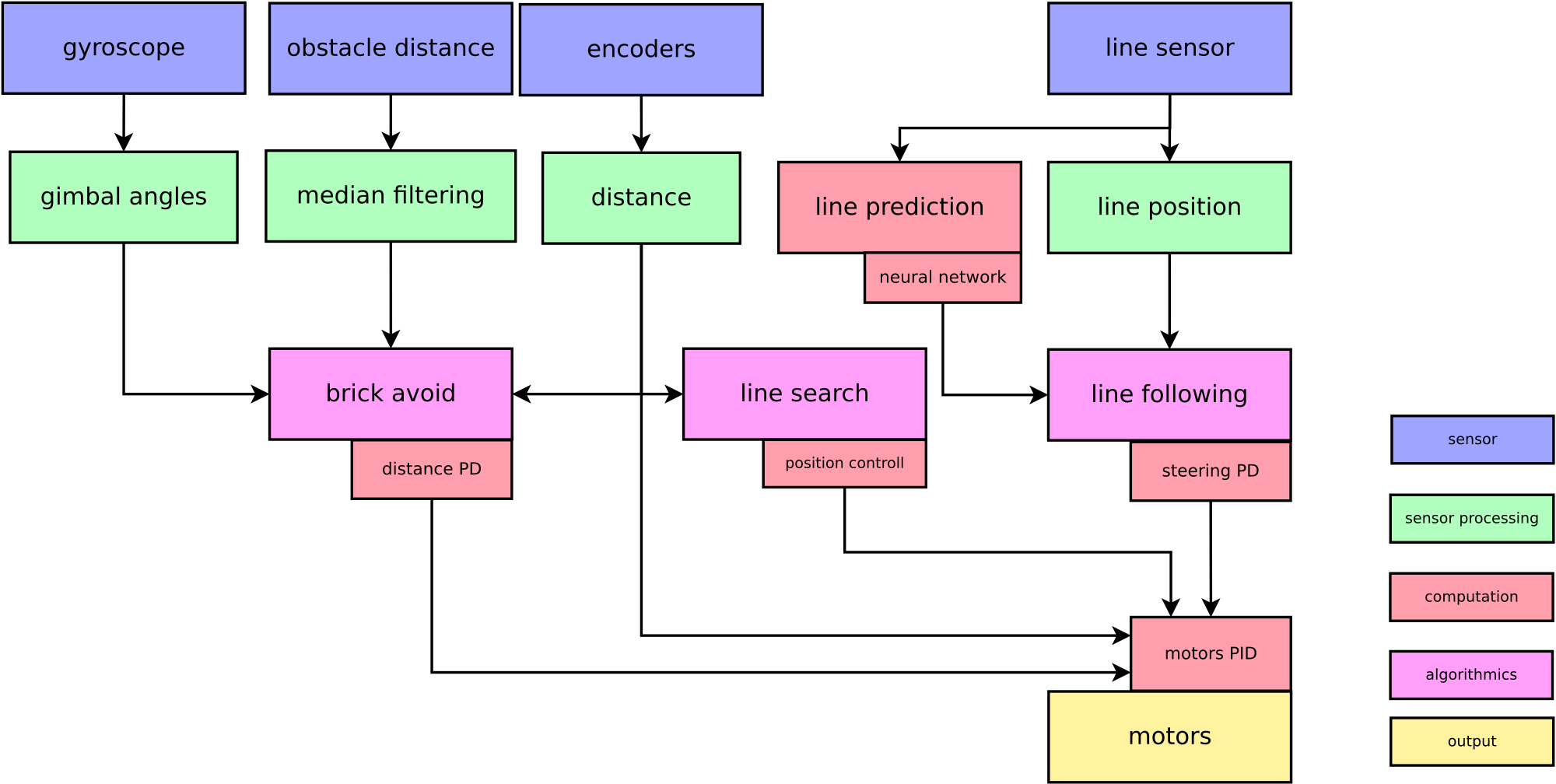
Robot software is based on this key points :
- quadratic interpolation : high precission line position computing
- main loop running on 200Hz
- steering PID : PD controller for steering
- motor PID : two PIDs for motors speed controll
- curve shape prediction : run on straight line, brake on curve; deep neural network
- written in C++
- network training on GPU - own framework for CNN
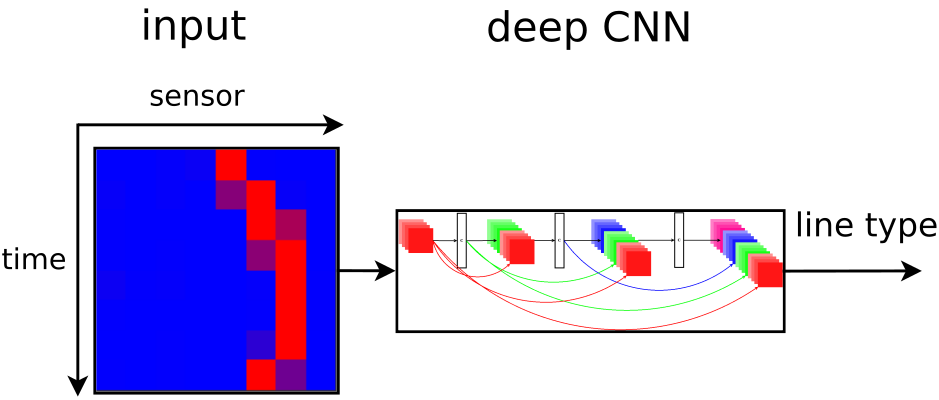
Neural network for line shape prediction
- fast run on straight line, brake on curve
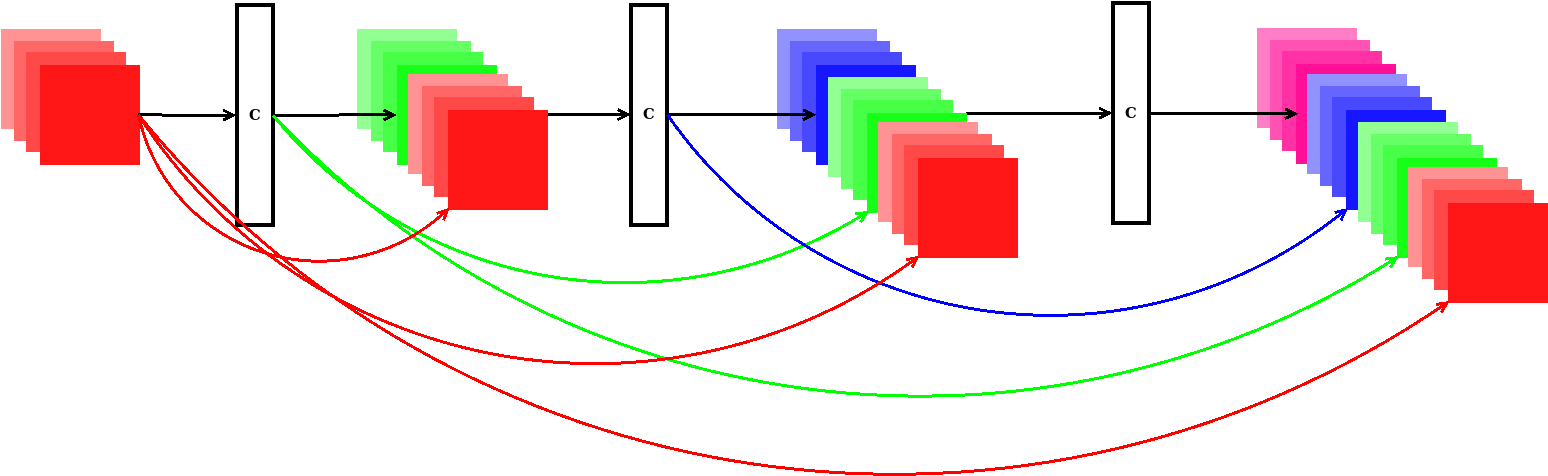
- neural network for line type classification, DenseNet - densely connected convolutional neural network
- input 8x8 matrix raw data from line sensors, 8 past line positions from 8 sensors
- output 5 curves types (two right, two left, one straight
Line prediction idea from last 8 line positions is on following figure
Line dataset was made as artificially generated data,
- 25000 for training
- 5000 for testing
- augmentation - luma noise, white noise
Network architecture
I was fighting with robustness against network speed. Network have to run 200Hz.
I decide to use DenseNet, which is very computation effective - in layers you need less kernels than in pure CNN.
Final network architecture is :
which is able to achieve 95% classification accuracy
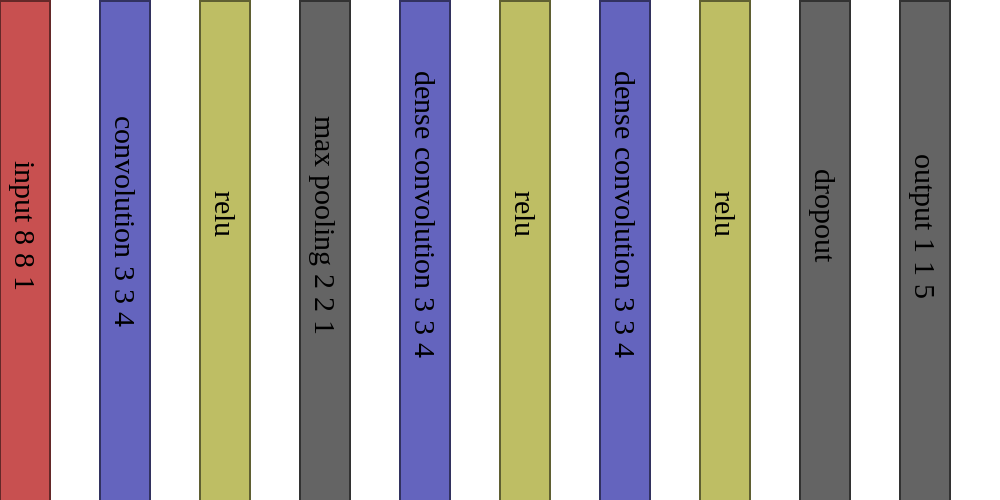
| layer | layer type | input feature map tensor size |
| 0 | convolution 3x3x4 | 8x8x1 |
| 1 | max pooling 2x2 | 8x8x4 |
| 2 | dense convolution 3x3x4 | 4x4x4 |
| 3 | dense convolution
3x3x4 | 4x4x8 |
| 4 | full connected 5 | 4x4x12 |
Fitting network into embedded
- convert float weights to int8_t
- scale weights into 8bit range
- use double buffer memory trick - to save memory, use only two common buffers for all layers




 Inderpreet Singh
Inderpreet Singh
 Jack Qiao
Jack Qiao

 Anmol Chopra
Anmol Chopra
how did you train the robot? and why the IMU?