 qq95538
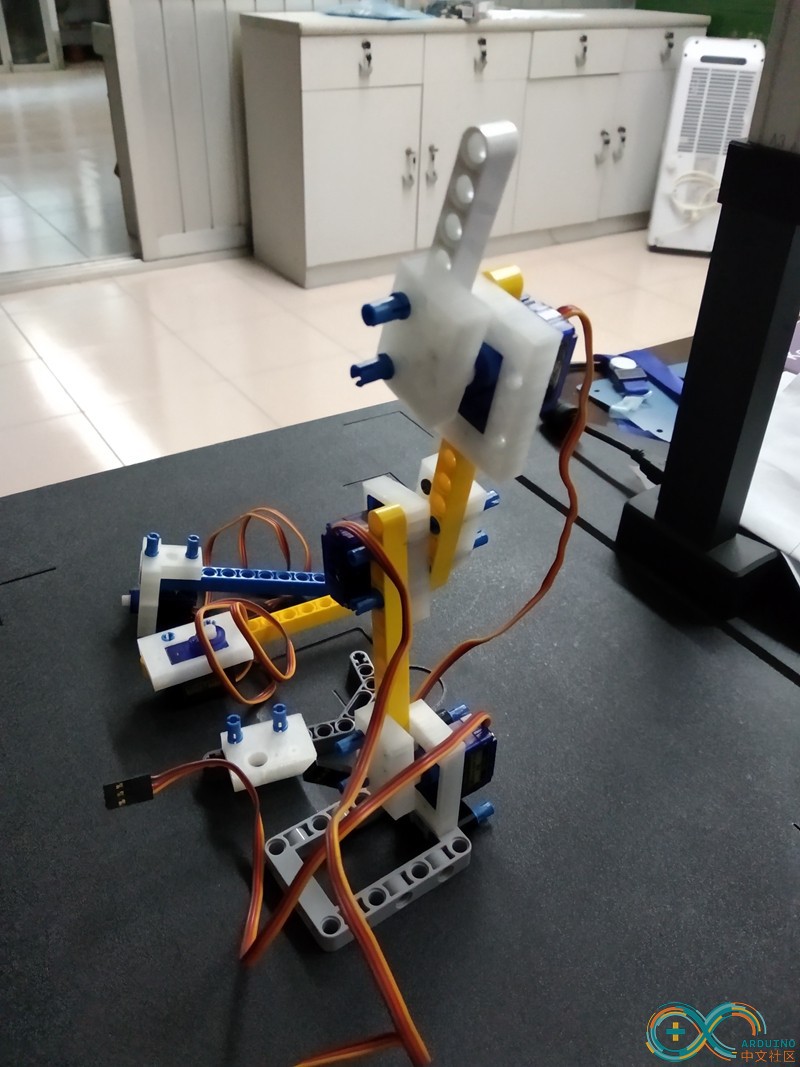
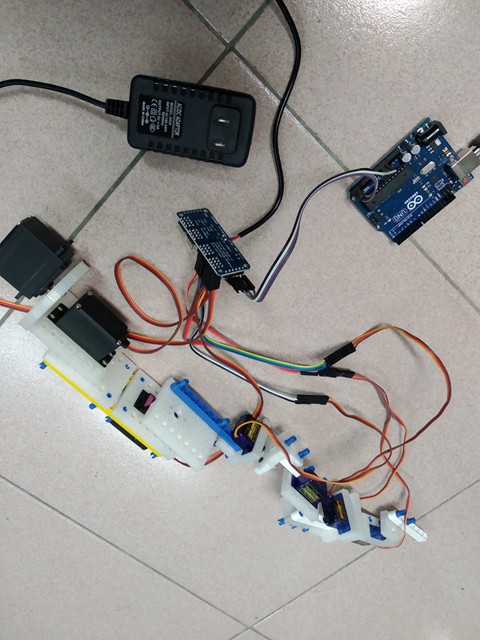
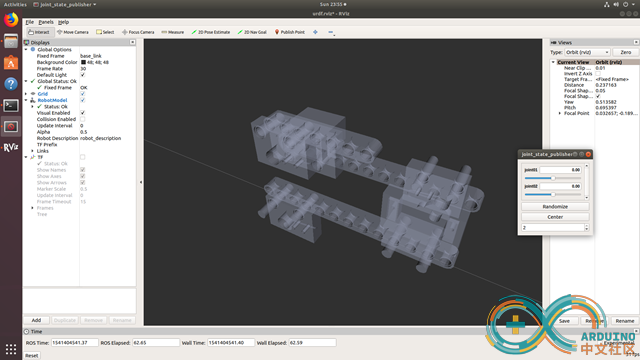
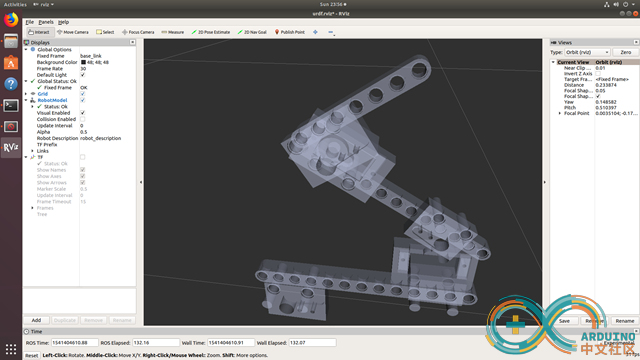
qq95538A 7DoF robot arm made by Arduino and cheap toy servos. All of them worth of $20. But The arm features motion-planning service.
0%
0%
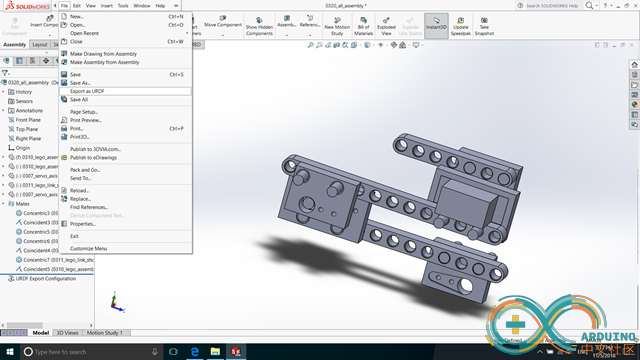
An Arduino Arm for ROS, wait a medical usage.
I read opensurgery.net, and have a doubt. can we make some kind of surgery robot with maker utilities?
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



a twitter message promotes paperwithcode.com
there are something helpful for robot design.