0%
0%
Crop Orientated Agricultural Navigation System
Navigate an agri-robot using the crops themselves as the guide via computer vision.
 GOAT INDUSTRIES
GOAT INDUSTRIESBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
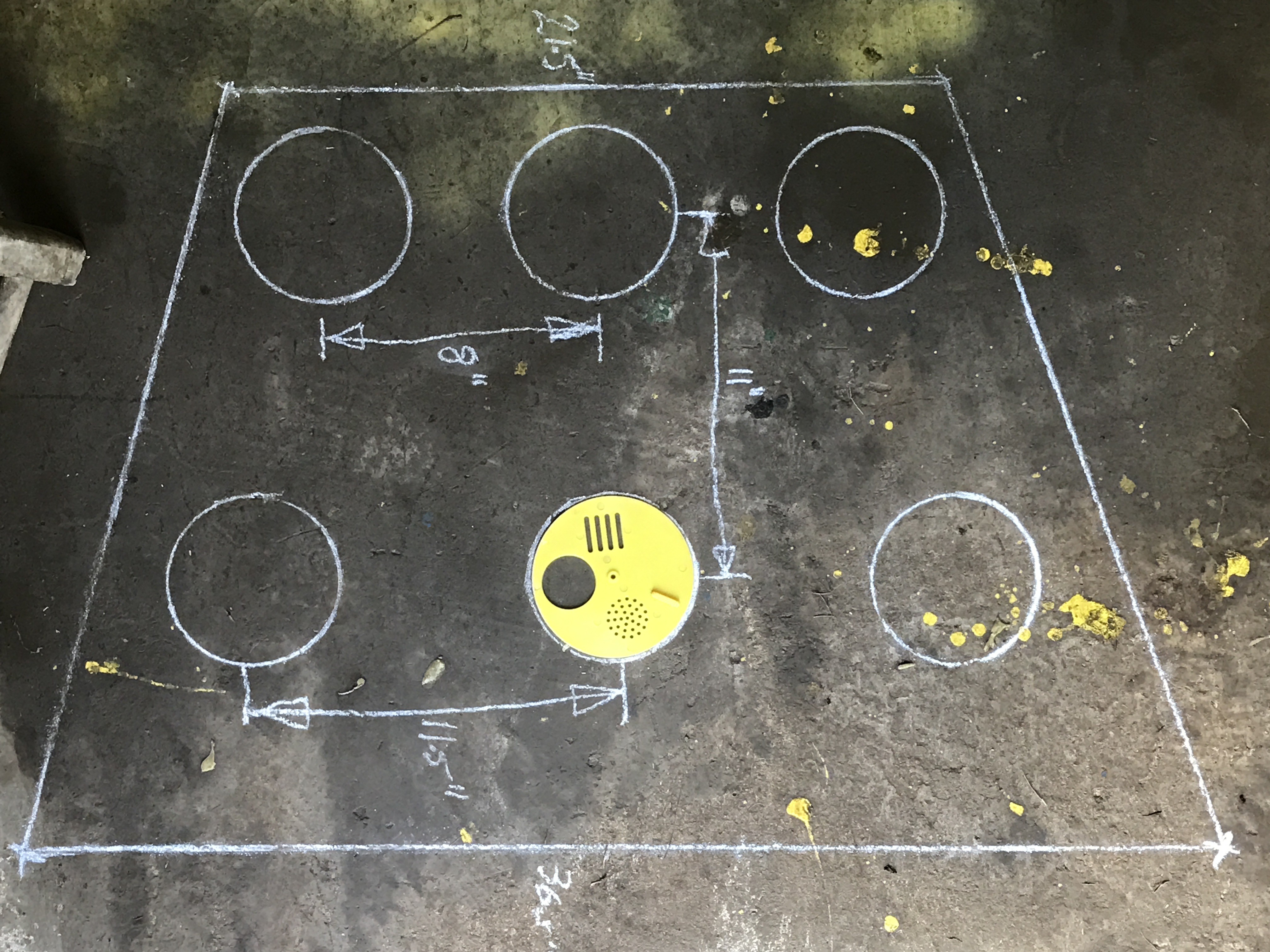
 As can be seen from the above, my current monitor wont allow full display of the high resolution camera images, but nonetheless shows the issue with perspective quite nicely. Looking at the above, we might think that the grid was nice and regular and giving good results, but, as below, I had to jiggle the back row of discs to compensate for the perspective:
As can be seen from the above, my current monitor wont allow full display of the high resolution camera images, but nonetheless shows the issue with perspective quite nicely. Looking at the above, we might think that the grid was nice and regular and giving good results, but, as below, I had to jiggle the back row of discs to compensate for the perspective: It shows that further calculations need to be made within the Jetson software stack to allow for perspective, which would completely throw off the navigation results if one of the plants were missing in the extremities of the grid. It's a nice challenge for the old brain cells!
It shows that further calculations need to be made within the Jetson software stack to allow for perspective, which would completely throw off the navigation results if one of the plants were missing in the extremities of the grid. It's a nice challenge for the old brain cells!

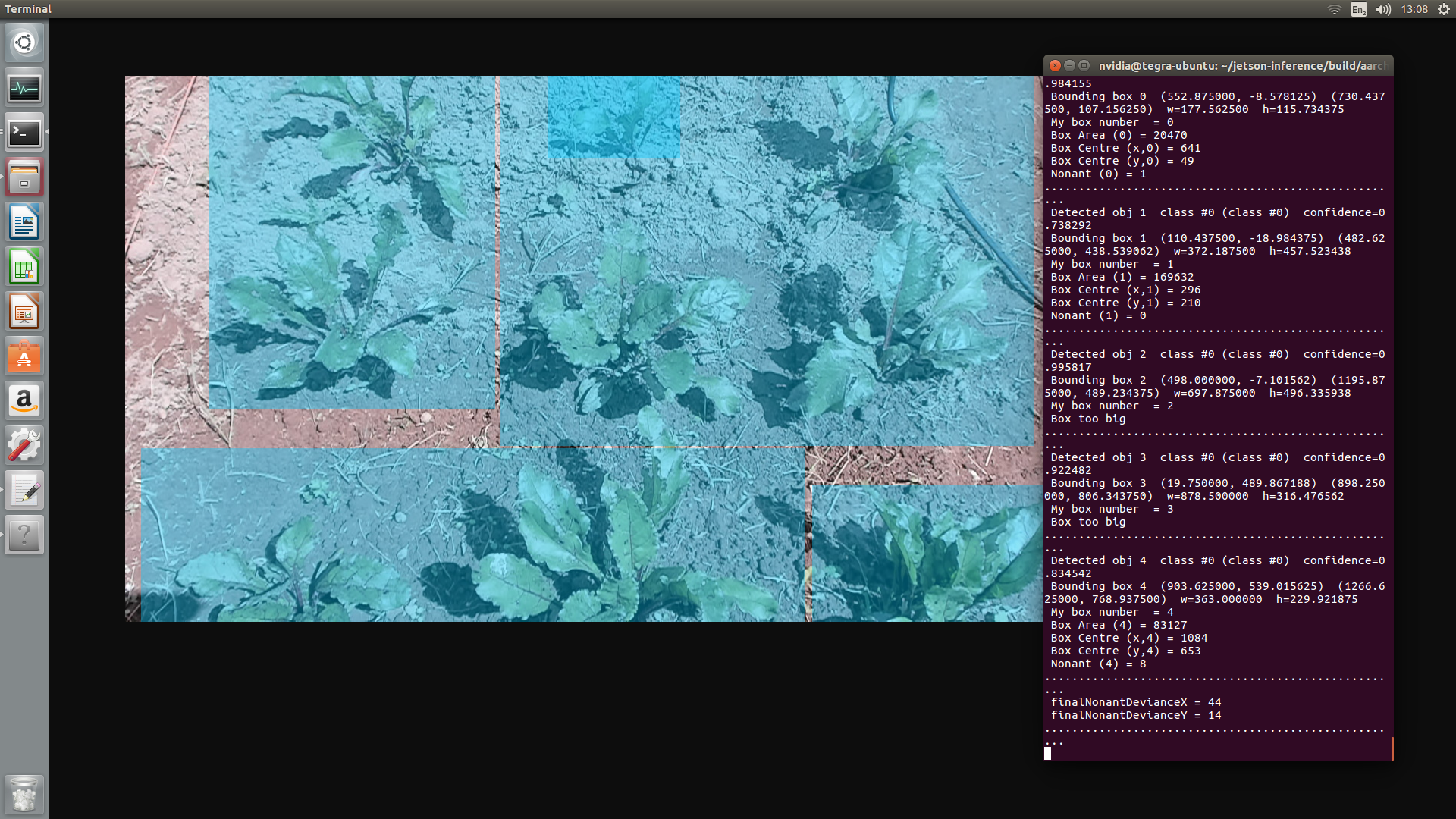 I vaguely remember seeing something somewhere in some code that could possibly stop this happening .... but where / how?
I vaguely remember seeing something somewhere in some code that could possibly stop this happening .... but where / how? It can be seen that the blue detection boxes are tighter on the plants than before. Here's the training graph, 4 hours on AWS Px2 xtra large:
It can be seen that the blue detection boxes are tighter on the plants than before. Here's the training graph, 4 hours on AWS Px2 xtra large: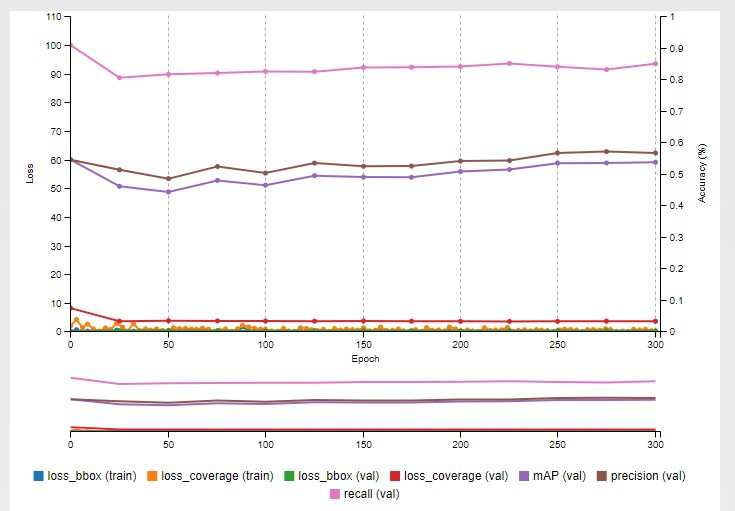 It does not look particularly impressive, but the training did seem to need 300 epochs to add the new features. Next step is to upgrade the camera to Logitech Brio 4K, which has 4x the pixels of the C930E and test on the WEEDINATOR robot.
It does not look particularly impressive, but the training did seem to need 300 epochs to add the new features. Next step is to upgrade the camera to Logitech Brio 4K, which has 4x the pixels of the C930E and test on the WEEDINATOR robot. This reduces image processing times in that we get 9 labelled objects for one cropped photo and labeling itself is quicker as 'selecting image time' is reduced.
This reduces image processing times in that we get 9 labelled objects for one cropped photo and labeling itself is quicker as 'selecting image time' is reduced.
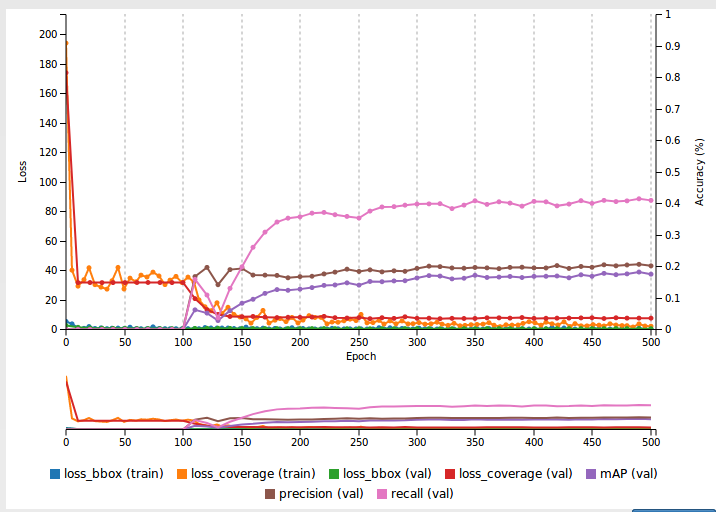 After uploading 2067 image sets to AWS, training results look very promising, with good convergence at 100 epochs. Total time to rain = 2 hours. I took the trouble to photograph the swedelings at different ranges, so that some will have intricate detail, whilst others will not.
After uploading 2067 image sets to AWS, training results look very promising, with good convergence at 100 epochs. Total time to rain = 2 hours. I took the trouble to photograph the swedelings at different ranges, so that some will have intricate detail, whilst others will not.
