 Omri Ben-bassat
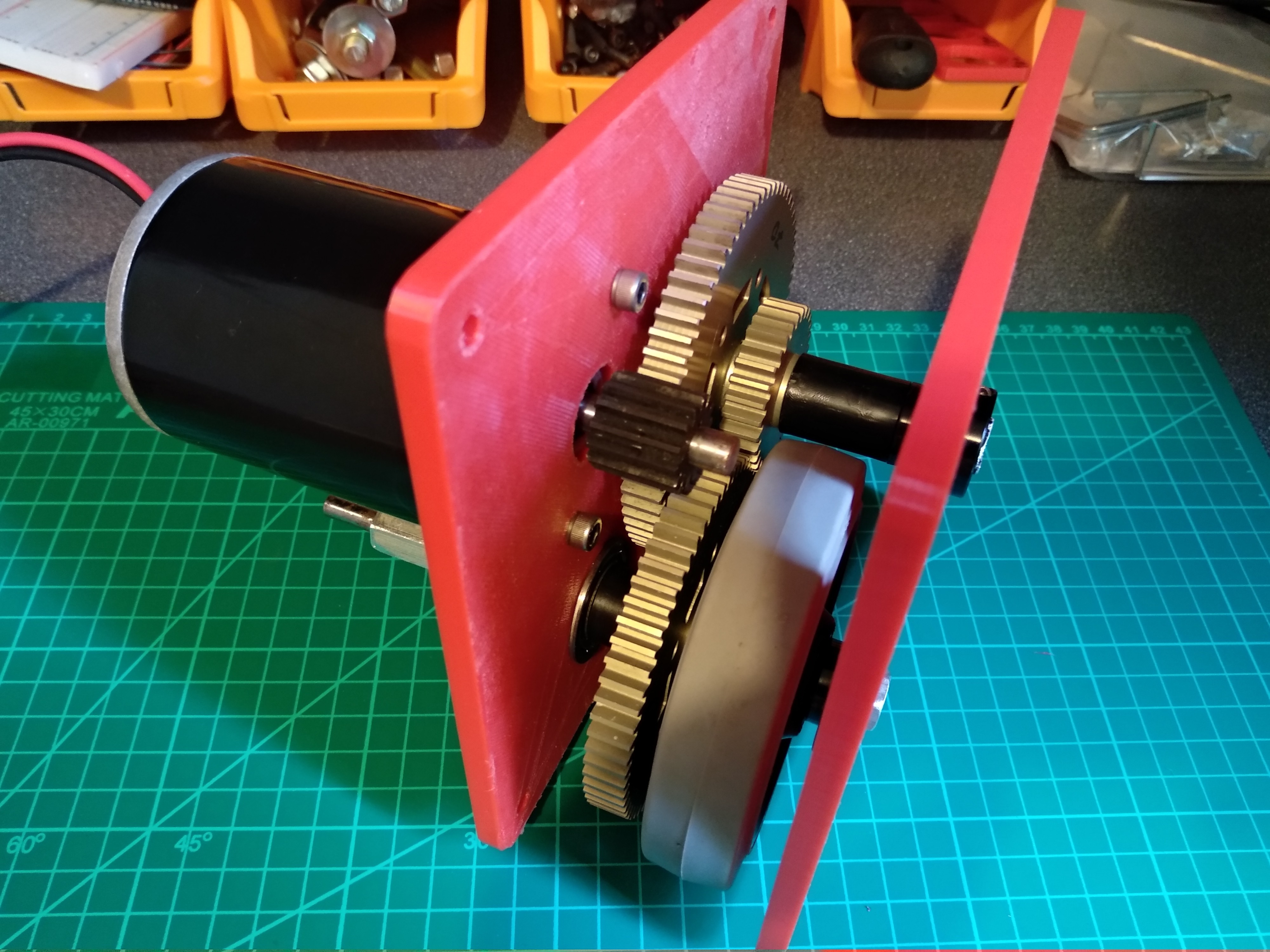
Omri Ben-bassat1. Gearbox - started designing and testing the gearbox for SHOKI. It is based on VEXPro Mini CIM motors, gears, bearings and shafts (taken from old SHOKI) with total of 1:11 gear reduction. With this setup the robot should be able to drive at approx 1 m/s. In the following picture you can see one of my recent prototype prints:
2. Wheel Encoder - got these cheap 600p/r 2 phase incremental rotary encoders and shaft couplers from AliExpress. Worked perfect for me when tested with Arduino Mega:
Encoders:
https://www.aliexpress.com/item/32849332003.html
Source code:
https://gist.github.com/betab0t/9f6b0bdc33e0a5c5054077cb5c702aa4
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.