0%
0%
Mini Lathe (Emco Compact 5) CNC Conversion
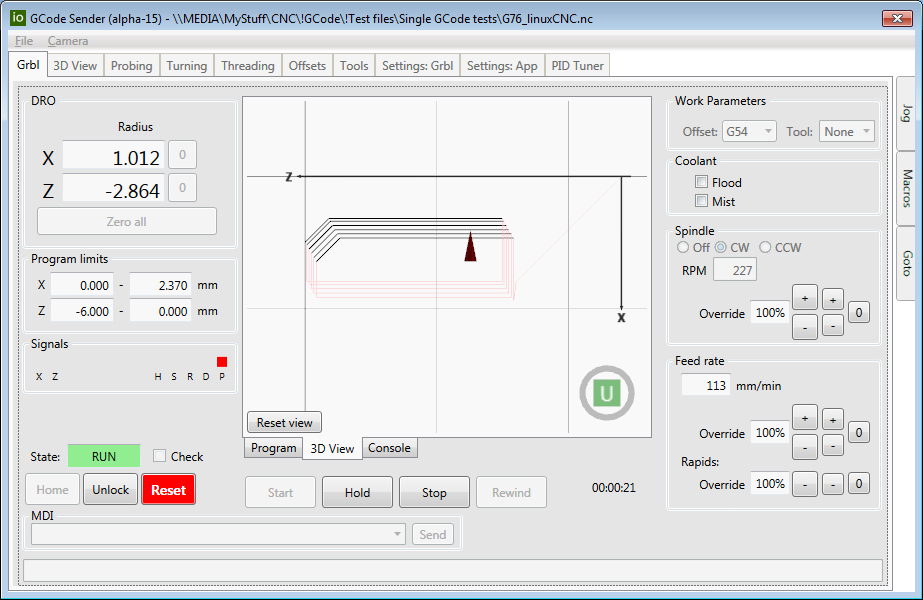
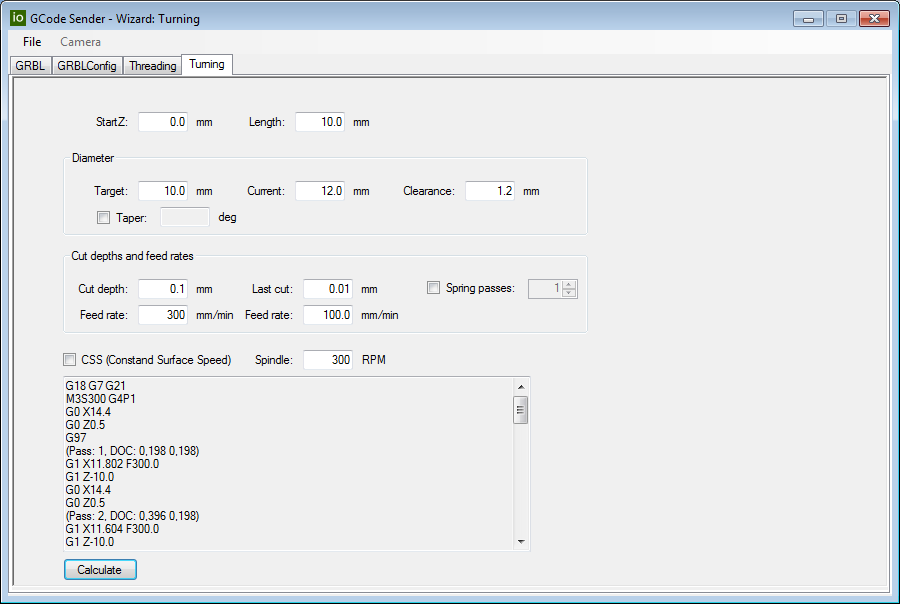
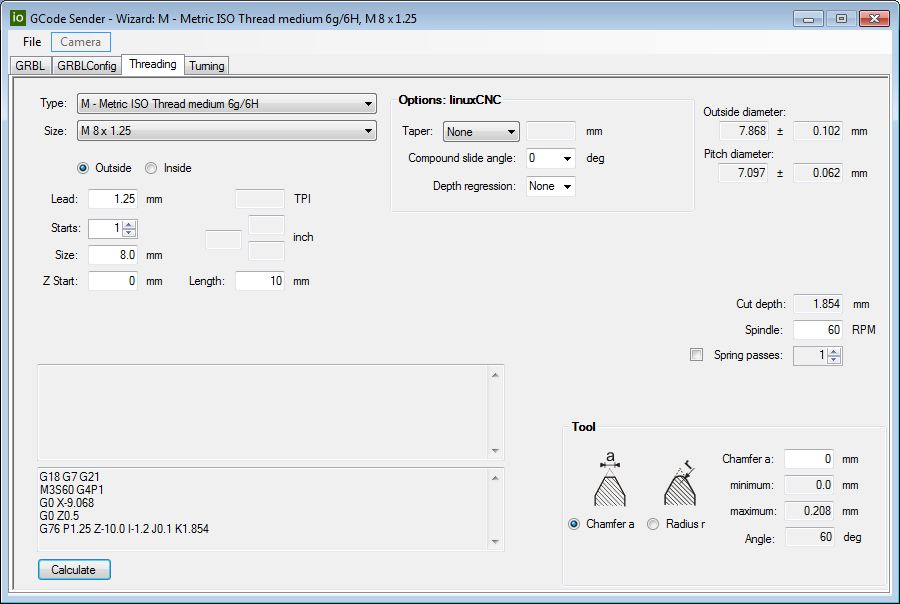
New cross slide, BLDC spindle motor, custom 32-bit grbl port, spindle sync, threading (G76), MPG controller+++
 Terje Io
Terje IoBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 polyfractal
polyfractal
 Xylitol
Xylitol
 RudyAramayo
RudyAramayo
Love the project, working on something similar myself. Is the software available? I have been struggling to find anything like it.