 Michael G
Michael GStarting Spike’s Body and Adding a Leg:
Now that we have one leg completely designed, we simply need to appropriately mirror the Leg Assembly appropriately to go in each of the four locations. Note that since, the legs are all designed by default to bend their joints in the same direction (essentially all the legs are designed as “front legs”, as anatomically the joints in the front and back legs of a cheetah bend anti-directionally relative to one another). Therefore, the legs themselves are identical front to back, but mirrored side-to-side, while the Leg Motor Box is mirrored both front-to-back and side-to-side. This approach ensures that Spike has the widest possible stance for his size and makes sure Spike’s body is as compact as possible.
I started by creating a rectangle in SolidWorks the size that I roughly wanted Spike to be as the Main Lower Plate. Once I had a rough size determined I added two vertical Leg Retention Plates, each with two holes for press-fit bearings with a ¾” inner diameter. The inner races of the bearings will be captured on both sides, with the hole assembly pulled together by two 5/16” bolts, pulling the inside of the bearings’ inner races against washers placed on the ¾” hip D-shaft pressing against the Leg Motor Box’s side plates.
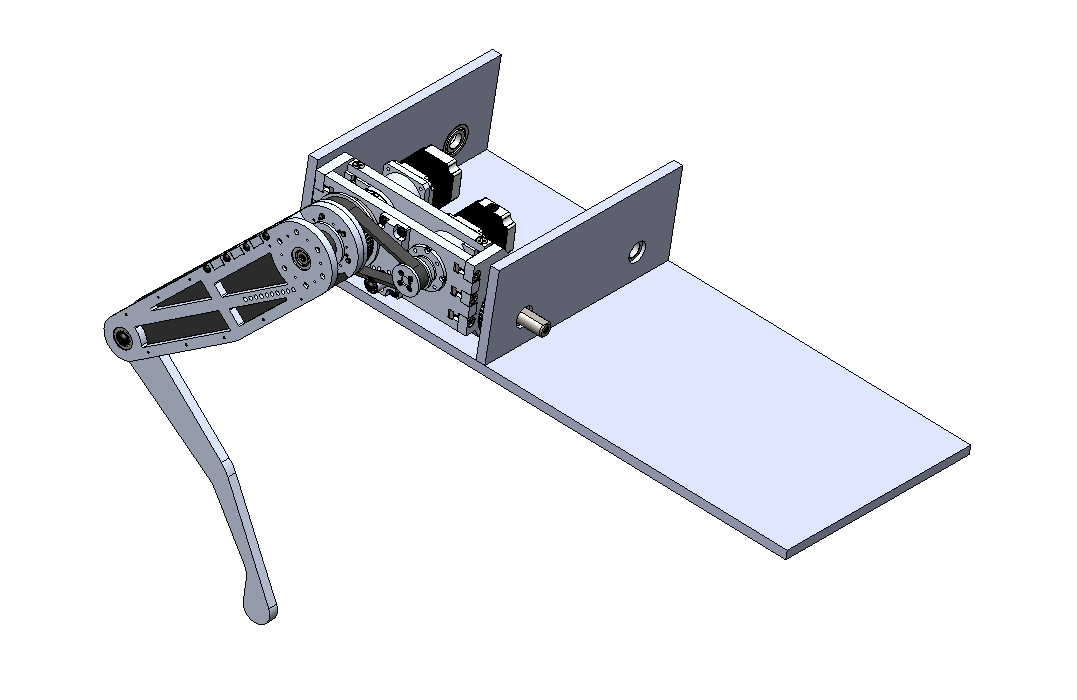
At this point I was unsure where exactly to fit the two motors per side (referring to front-back) needed to power Spike’s hips. To start, I lengthened the Main Lower Plate to provide some room for batteries right in Spike’s belly and added two more Leg Retention Plates on the opposite side of Spike. I also mirrored one leg to check for clearance issues during hip rotation, and then accordingly tweaked the motor placement in the Leg Motor Boxes and changed the bearing-to-bearing distance in the Leg Retention plate to fix clearance issues during hip movement
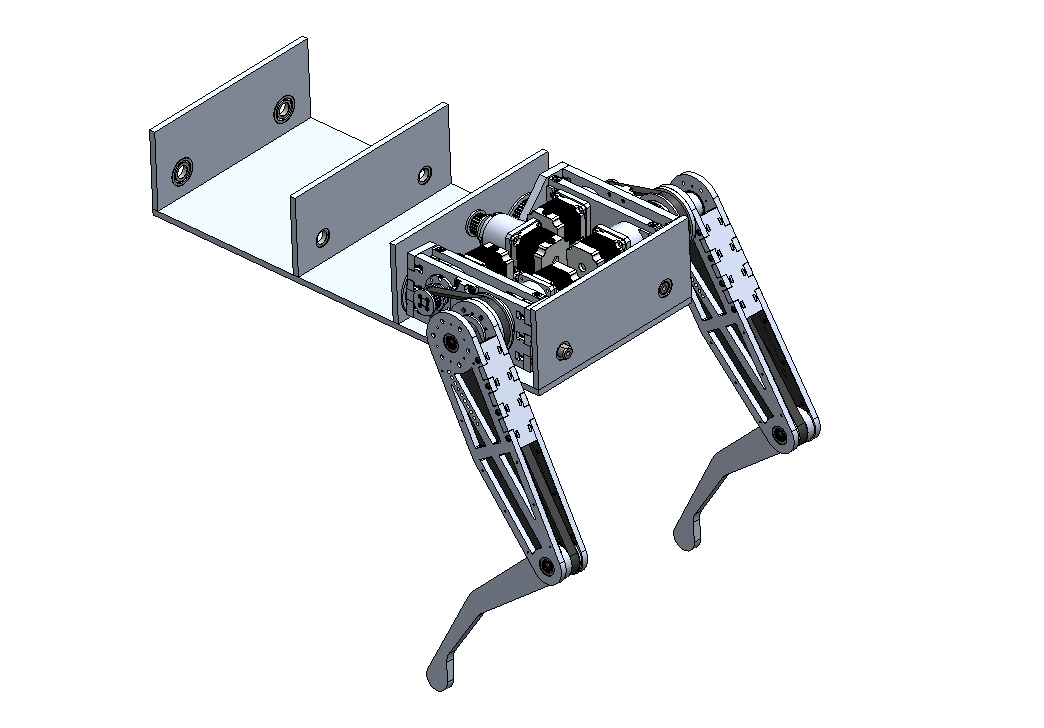
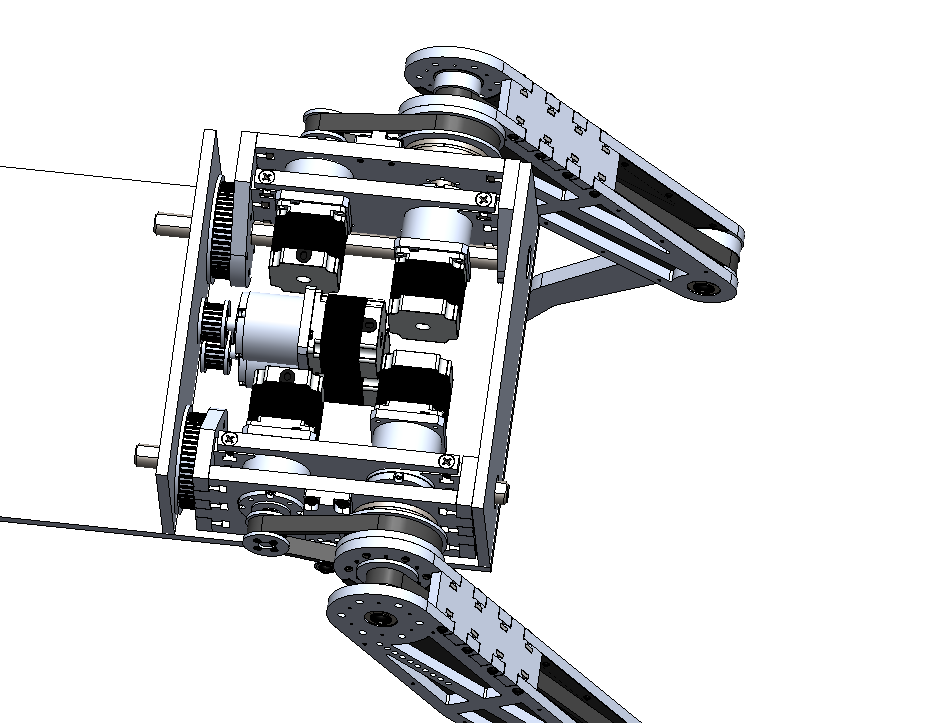
Now that I had fixed the clearance issues during hip movement, I realized that there was sufficient space in between the Leg Motor Box Assemblies on each side to fit two more Nema 23 Stepper Motors with 15:1 planetary gearboxes, as used everywhere in Spike so far. For now, I’m leaving them in rough position, and I’ll add a waterjet flexure motor mount later on.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.