 doctek
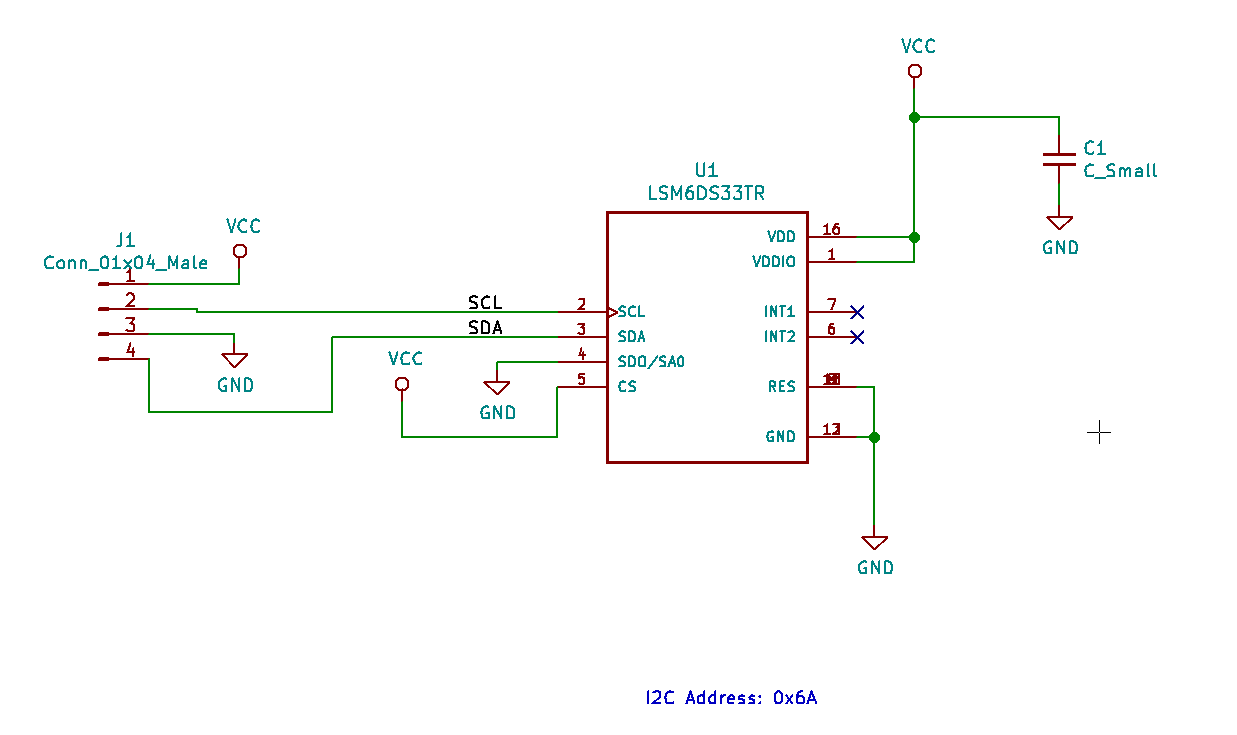
doctekThe accelerometer / gyroscope unit is the LSM6DS33 from ST Microelectronics. It's in a 3mm square SMT package and only needs a 100nF cap. Communication is by I2C bus. Various ARM microprocessors could be used to process the data, but a Teensy 3.6 will be used initially. The Teensy is still small enough to fit on the back of the hand and not impede motion.
Here is a sketch of the concept. I've slightly simplified it to a narrow strip, but the idea is the same.

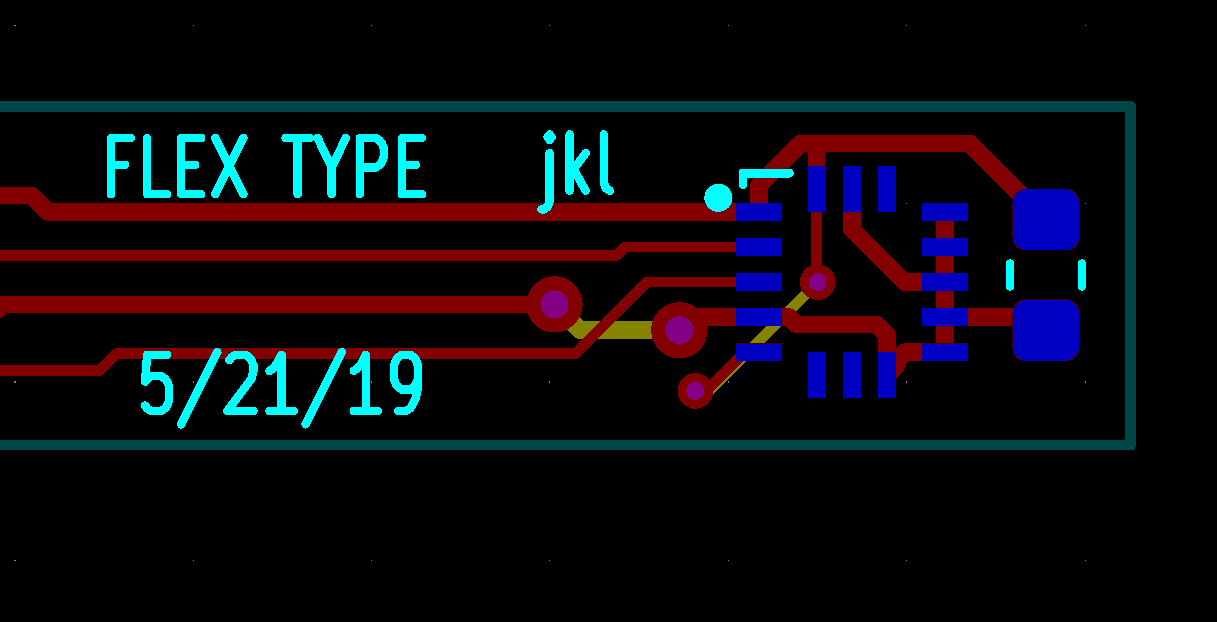
The flex layout is a strip one quarter inch by four inches, so I should be able to get two sets of 3 boards from OSH park for 30 bucks or so.
Design is done in KiCAD. Here is the Schematic:
And here is the board design from the Gerber file. (Partial, to show detail. Full length is 4 inches):

Hi , how do you plan to differentiate each letter?