0%
0%
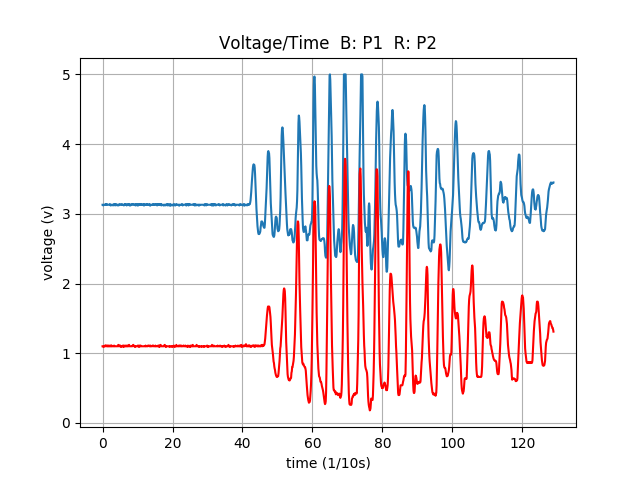
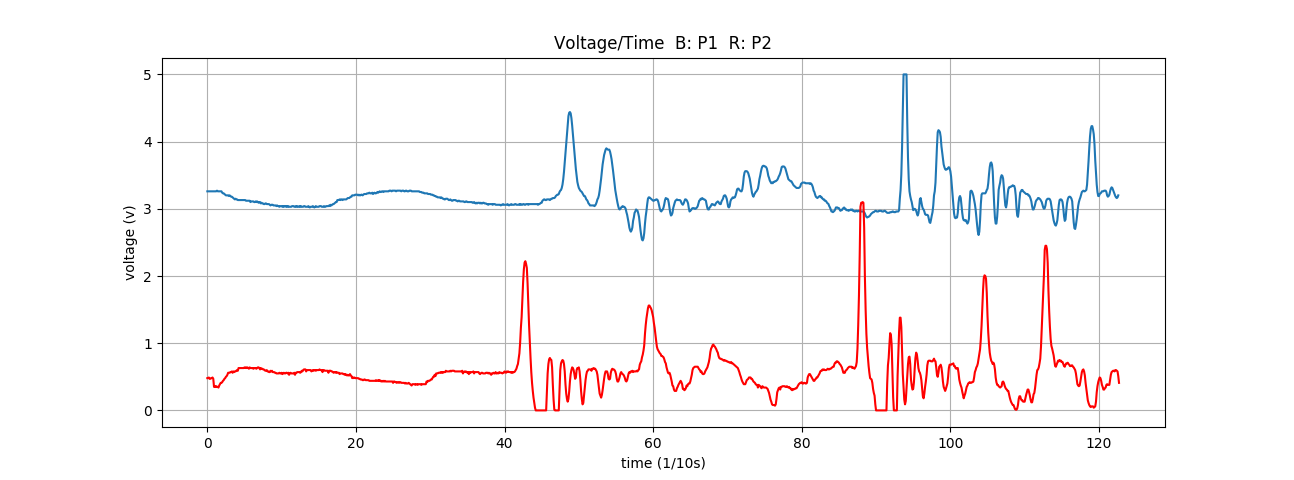
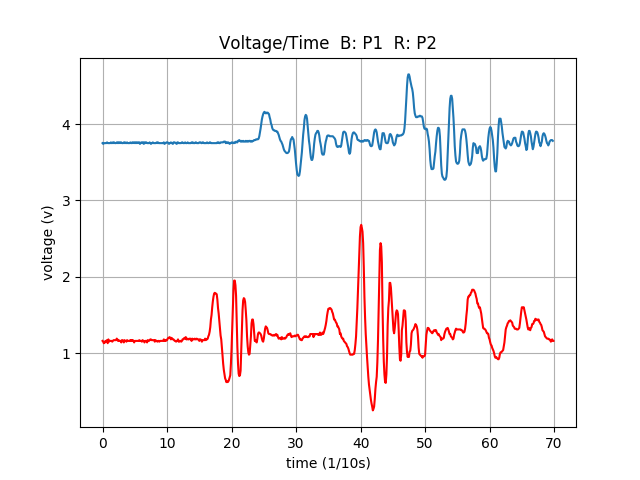
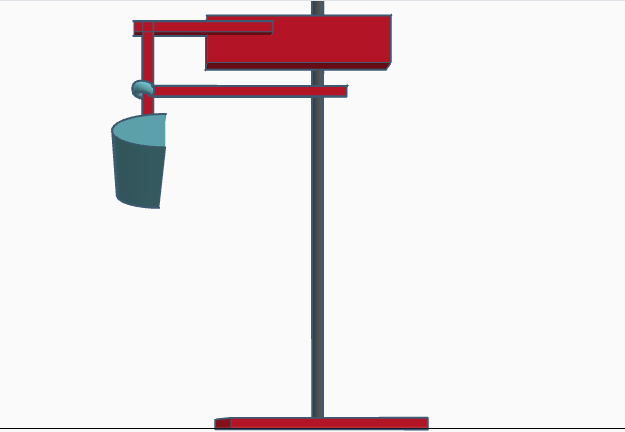
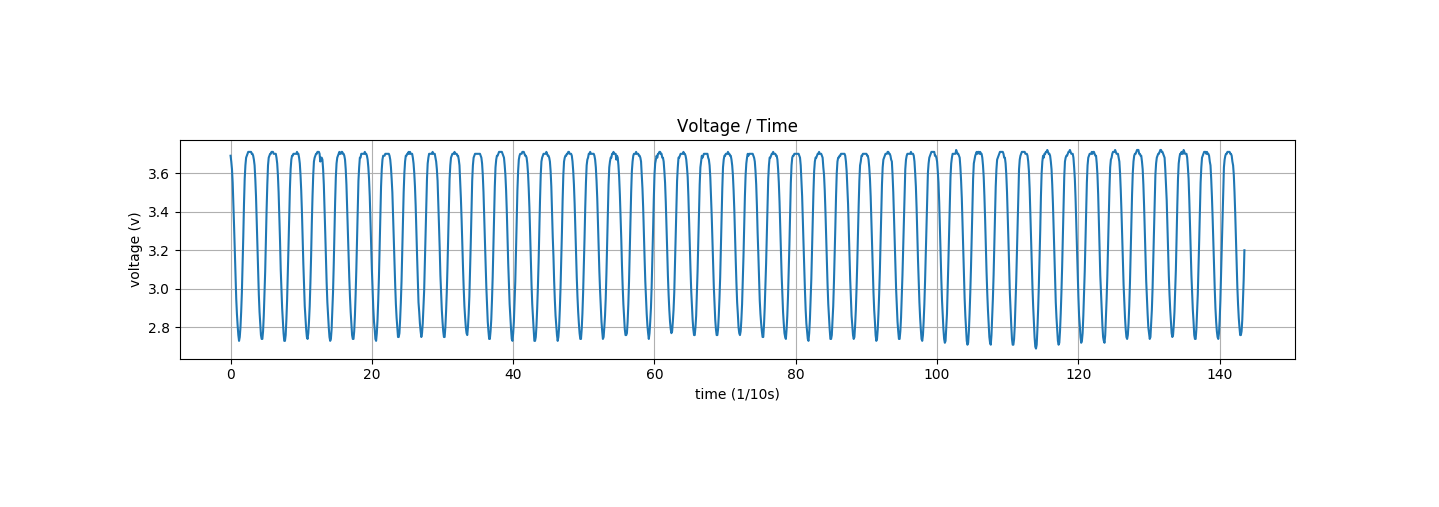
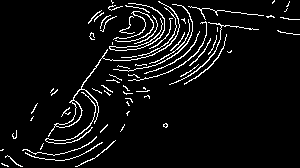
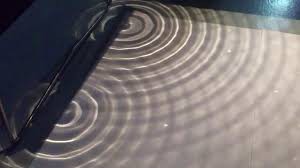
Computer Vision on water wave analysis.
The purpose of this project is to create a computer vision system for water wave tracking and wave analysis.
 Xiyuan
XiyuanBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



Did you try a little bit different methods? For example something like this:
https://hackaday.io/project/6958-dolpi-raspi-polarization-camera