 ssla-couk
ssla-coukIntroduction
As the proportion of logistics costs gradually increases, various logistics technologies are being developed to obtain price competitiveness of products through reduction of logistics costs. Especially, due to the successful commercialization of logistics transportation robots such as Amazon’s Kiva System, technology development of logistics robots has attracted great interest. Also, the element technology and robot system that can be applied to various logistics fields are being studied. Many companies are adopting various automation and information systems to increase profits and logistics efficiency.
2. Design of Transportation Robot System
2.1 Design of Transportation Mobile Robot
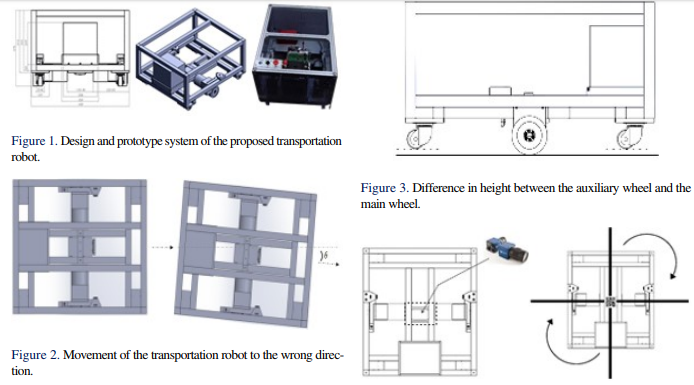
The transportation robot applied to the logistics center needs driving technology, localization technology and task process technology. Driving technology is to safely transport the objects Table 1. Specification of the transportation robot Contents Values (mm) Width of robot’s frame (d) 600.0 Length of robot’s frame (L) 700.0 Radius of steerable wheel 24.4 Radius of active wheel (R) 50.0 Height of lifter’s frame 1596.0 Length of lifter’s frame 300.0 Width of fork-type element 196.0 Length of fork-type element 503.5 to a target location. The location recognition is required for driving and collision avoidance in the dynamic environment where several robots are operating. The task processing technique is to deliver products to an operator using a pallet, a shelf, or a rack, and the behavior of the robots varies depending on the tasks. The most important consideration in the design of these robots is the internal environment of the logistics center and the type of operation. Logistics transportation robots that perform diverse and precise tasks increase their development costs accordingly.
2.3 Design of the Embedded Control System
The control system of the proposed robot can be divided into a main server, a drive controller, and a forklift motion controller as shown in Figure 8. The main server plans the path of the individual transportation robots and the task schedule of the fork lifter. The information’s of paths and schedules are delivered to the robots via Wi-Fi communication. The information of completed tasks are received and stored in the server’s database. Based on the information of the stored database, it continuously calculates the path of the individual transportation robots, and transmits updated path and work plans to the logistics transportation robot in real time. The drive controller controls the drive motor to travel along the correct path to perform straight run and change of direction. The position information of the QR code is acquired through the camera at the robot. The current position is calculated through the image processing algorithm of Raspberry Pi-3 and the motor is controlled according to the path error. The forklift motion controller removes the shelf from the specified shelf support using a fork according to the task schedule and then moves it to the specified position. The sensors for the control use a camera for position recognition, a gyro sensor for direction recognition, and an ultrasonic sensor for obstacle detection. Figure 9 shows the software functions of the embedded controller. The control board shown in Figure 10 was manufactured for control of the transportation robot. The main CPU uses the ELB-REV4 iSCADA and is connected to the motor driver using relays to prevent reverse voltage. The Bluetooth module for shutdown and passive mode test is connected via UART communication to allow remote control by wireless communication and has IMU sensor for correction of rotation or path tracking error. Also, it relates to the acceleration sensor through SPI communication to acquire the attitude information of the robot. The battery uses a 24 V battery. The BLDC motors are individually controlled through the driver.
3. Control and Operation System of the Robot
3.1 Kinematic...
Read more »
 Boyang Xing
Boyang Xing
 akash asbro
akash asbro
 Adrian Prinz
Adrian Prinz
 Gaultier Lecaillon
Gaultier Lecaillon