 dannyvandenheuvel
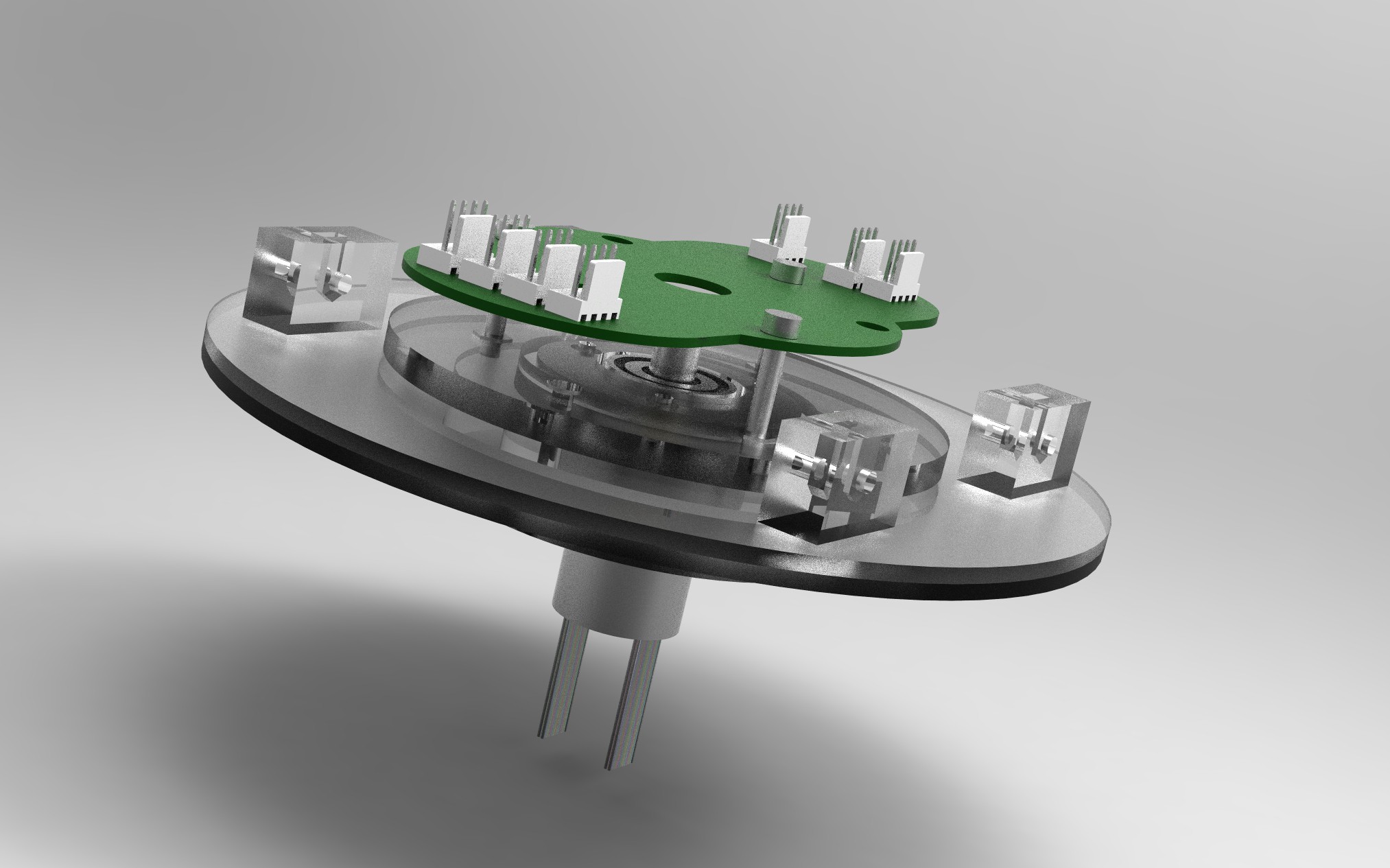
dannyvandenheuvelI'm building a slip ring CA24X4AL into the robot attached to a pcb board with connectors to wire the motors and the other electronics. The slipring has 24 wires and each wire can have 2A of current. I wanted to wire the robot on a professional way.

A project log for 'Thor' robot with addons and GUI
Thor robot based on the author AngelLM
I'm building a slip ring CA24X4AL into the robot attached to a pcb board with connectors to wire the motors and the other electronics. The slipring has 24 wires and each wire can have 2A of current. I wanted to wire the robot on a professional way.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
It's a good idea!
Are you sure? yes | no
I always liked that kind of wires, how them allow to rotate infinitely hahaha... but were to expensive to my low-cost arm.
I want to see it working!
Are you sure? yes | no
I know, low cost makes the difference. I wanted to make the 'Thor' robot as close as a real industrial one and I know it's going to cost a little bit more. Everybody can decide which robot they will like to make. :-) I'll try to use and find the cheapest materials.
Are you sure? yes | no
Yeah! I love the way you are turning it that great! I'm learning a lot from you :)
Are you sure? yes | no