 dannyvandenheuvel
dannyvandenheuvel it I'm trying to add thor with feedback sensor technics, I want to keep the printed parts so far, so I made some addon pieces.
It's just a design at the moment, tell me what you think of it?
I have used so allready existing parts, the feedback pcb comes from makeblock. (Angular sensor v1.0) 360 degrees endless potentiometer.

I made a first design
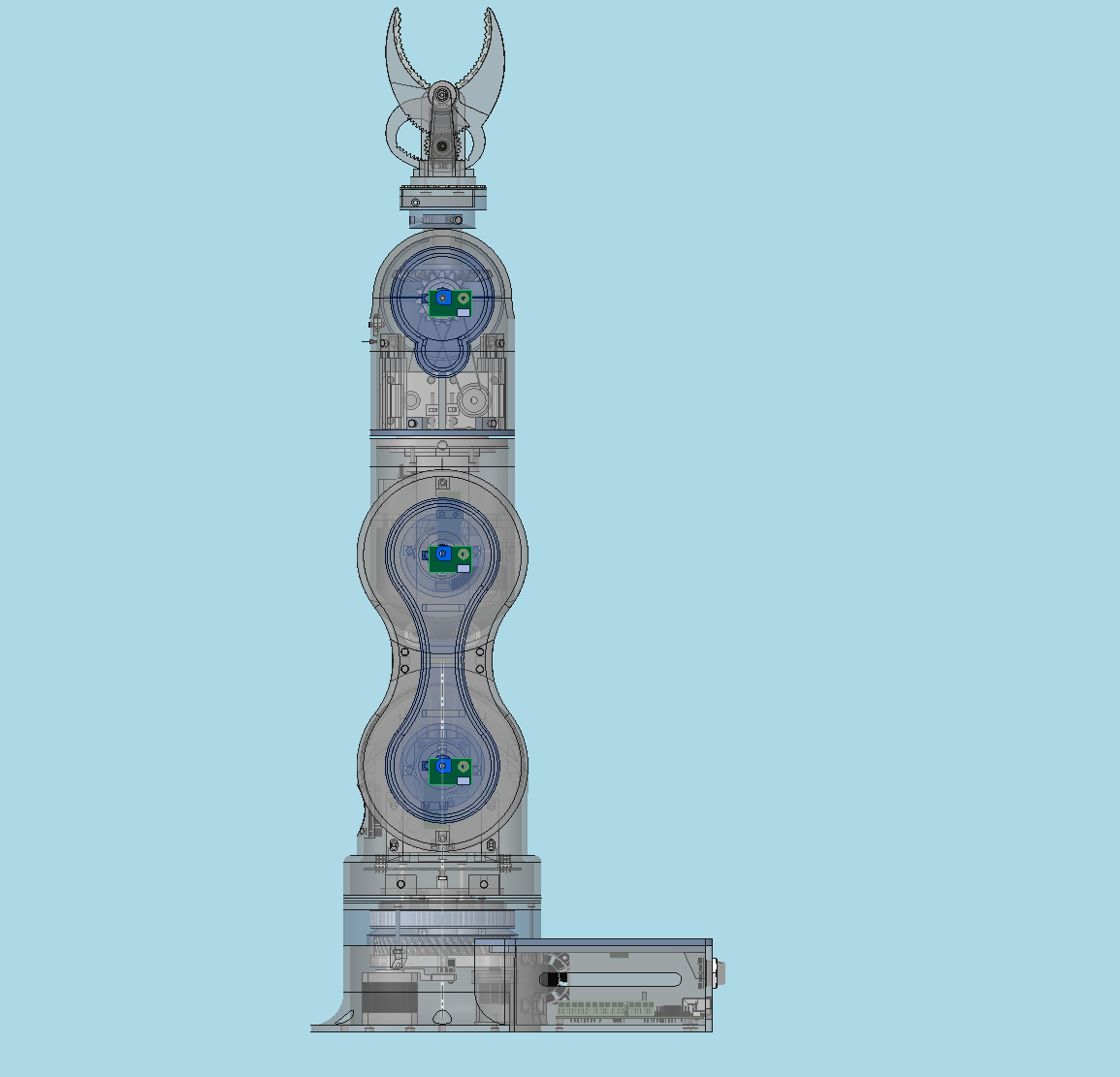
Added 4 sensors for, two for the tools head , one for the shoulder and one for the elbow.
The base and rotating wrist will have other sensors, working on it.
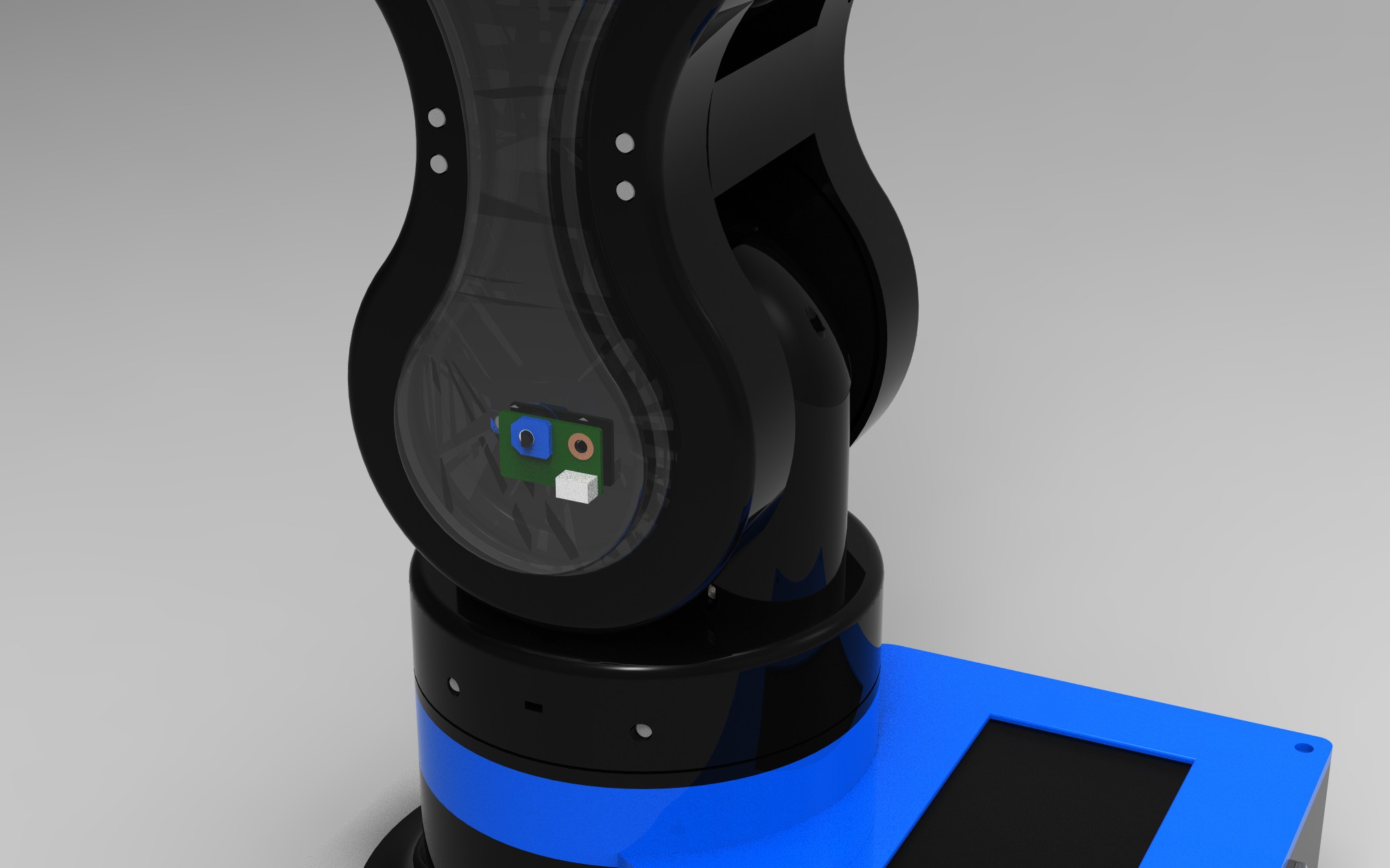
And this will be the covers on the robot.


I am going the use a mini arduino to connect all sensors to the anolog inputs, and going to add the gripper servo and neopixel light also at it. So just 4 wires will be needed to go to the main board.
Like I said, It will be addons to the already designed thor robot. No need to reprint it. Just some small holes to drill to put every part on it.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
They are definitely replacing the photo sensors, the accuracy has to be checked the next comming weeks when I finnaly have build my thor. :-) For the base I have a 5 turns potentiometer with the same gear wheel as the motor. Just the wrist will be a challenging one. There's not much room inside of it. If accuracy will become a problem I will go over to magnetic measuring.
Are you sure? yes | no
Your robot is becoming very sexy! Look at these curves!
How accurate are these sensors? And could they replace the photo sensor mechanism?
Are you sure? yes | no