 dannyvandenheuvel
dannyvandenheuvelThor+ Feedback sensors for Art2 and Art3
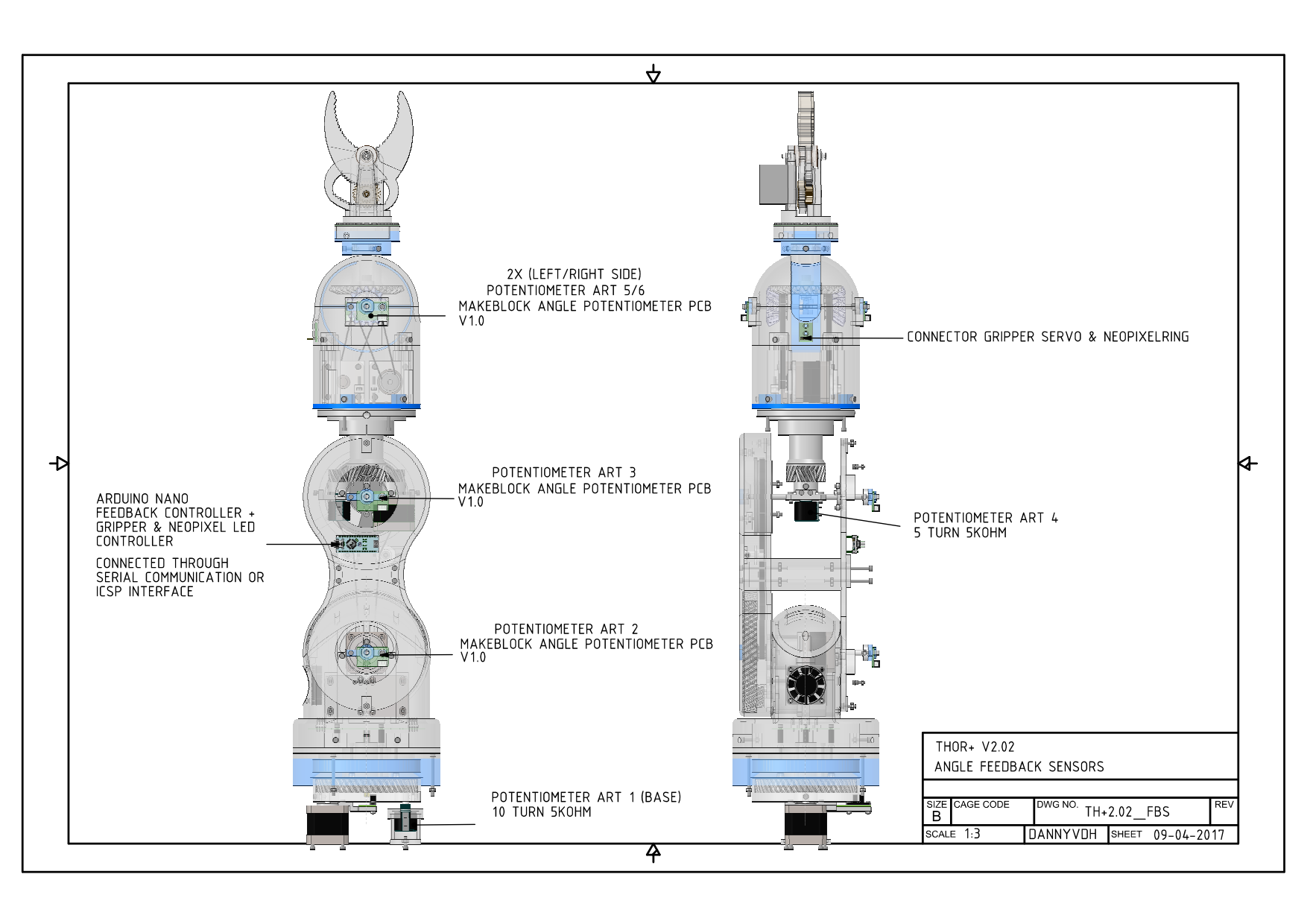
All feedback sensors, gripper servo and neo pixel ledring will be controlled by build-in arduino nano
serial connected to the main controller board.
Sheet all feedback sensors integrated into Thor+
Sensors:
4 x Makeblock Angular sensor V1.0
1 x 10 turns potentiometer 5Kohm (burns)
1 x 5 turns potentiometer 5Kohm (burns)
Controller:
1 x Arduino Nano controller
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
So, if I want to have the angle sensor feedback I should wait until v2.02 is released before I start printing?
Are you sure? yes | no
This version has already finished, but not yet released. I will put all files online asap. Still very hard coding graphical GUI controller. Just through a hard part of the inverse kinematics. I had lot of examples but nothing perfect so I did study hard and code it myself.
Are you sure? yes | no
Very cool!
I guess potentiometer is a good choice, and looking forward to your new unity gui software :-)
Are you sure? yes | no
Cool! Why did you choose for the analog encoder and not a magnetic encoder like the AS5048A?
And are you planning to add an encoder to your stepper motors as well?
Are you sure? yes | no
At first I it's made with potentiometers but it's very easy to switch to magnetic encoders. I'm printing all modified pieces for now and going to test, if currency will be a problem I will forsee them with magnetic encoders. I'll try to keep it budget friendly but at the same time it must be good enough to play with it!
If I wanted to make close loop with stepper motors I have to redesign the whole robot arm. Maybe I will do it on a later state, first lets try to move this thing on the right trail, yeah...
The intension to work with potentiometers is very simple, I wanted to use them only in the initialisation fase to know where he is at first powerup. From then I work with the stepper pulses. I check the position with the potentiometer angle position and when the result is to great I will stop the robot. You can manualy set your arm to init position and init from the program. From that moment stepper position will be equal to the angle position of the potentiometer. I'll tested it with the base stepper motor and it gave me a good result. I will be coming back very soon with the results.
The feedback will also be used to visualisize my unity gui software controller.
Are you sure? yes | no
I found this very cheap absolute encoder from the Bourns brand which makes me trust is a bit. The part number is: EAW0J-B24-AE0128L
and here's a link to it in sparkfun.com the cost right now is about $8
https://www.sparkfun.com/products/15036
Are you sure? yes | no