 Kyle Isom
Kyle Isom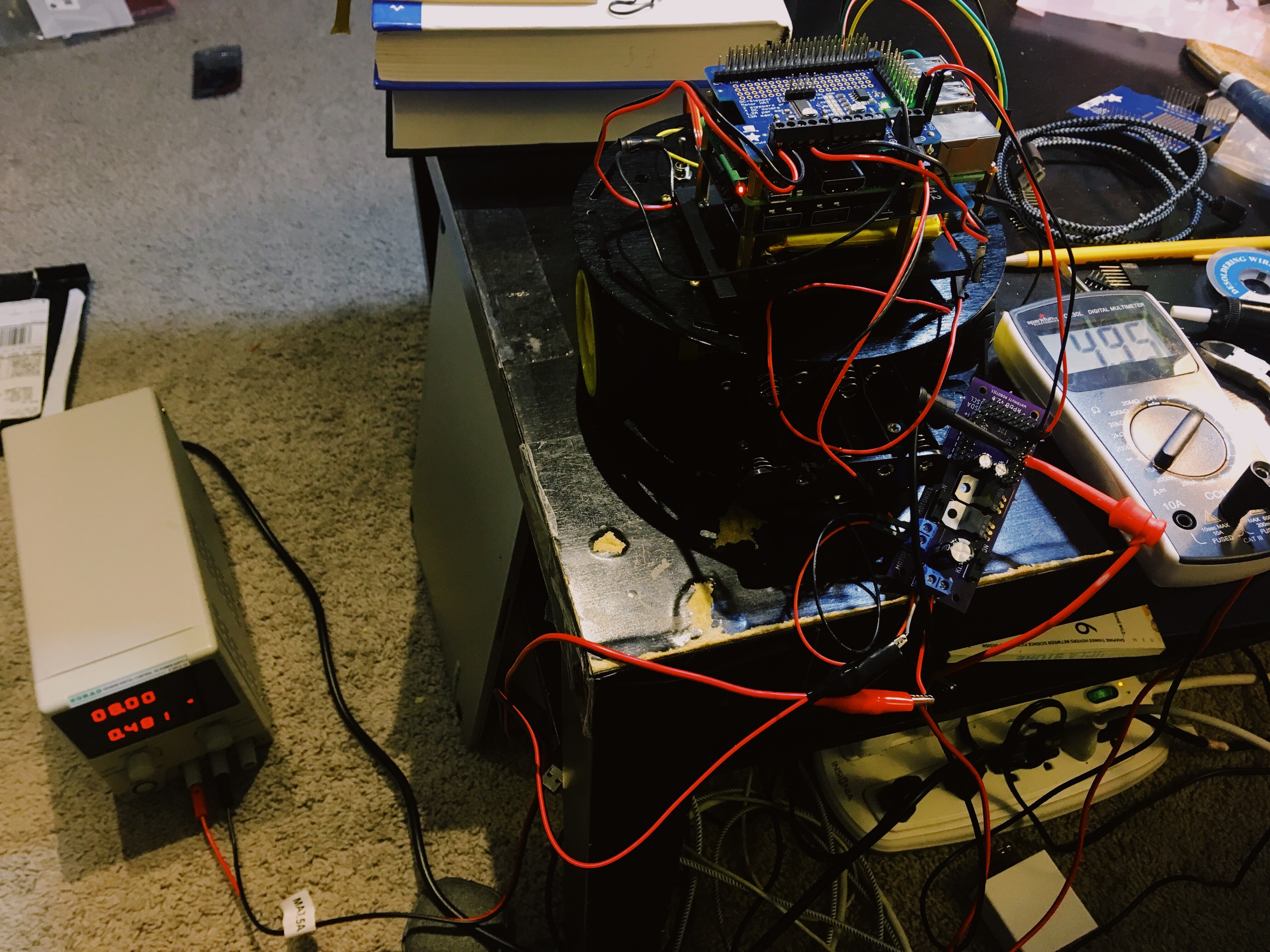
It mostly works. Building ROS packages causes it to power off, which I suspect is due to not being able to source enough current.
A project log for Robot Power Distribution Board
Provides stable 5V and 3.3V rails, a direct power output, and I2C expansion.
It mostly works. Building ROS packages causes it to power off, which I suspect is due to not being able to source enough current.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.