 Kyle Isom
Kyle IsomI'm rebuilding Scooter after deciding that particular robot was too problematic. Here's the two of them together:
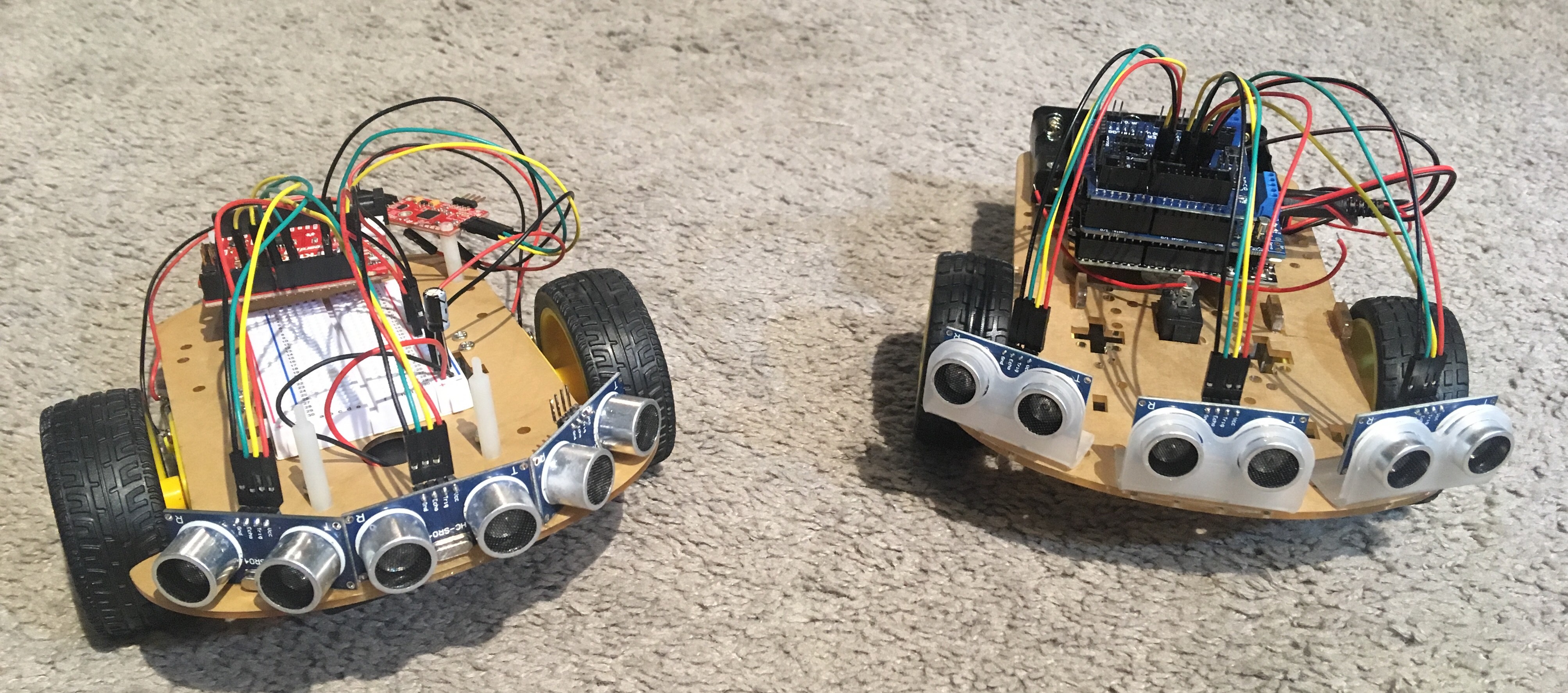
Some improvements:
- I have a single control stack now, which is nice from a footprint and attachment perspective.
- The sensors are in plastic mounts that I was able to screw into the chassis.
However, I don't yet have a good way to power the sensor board (which I need to expand the power rails for the sensors) with the Redboard Turbo, so I'm stuck with an AVR board until that gets fixed.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.