NEBRA Labs
NEBRA Labs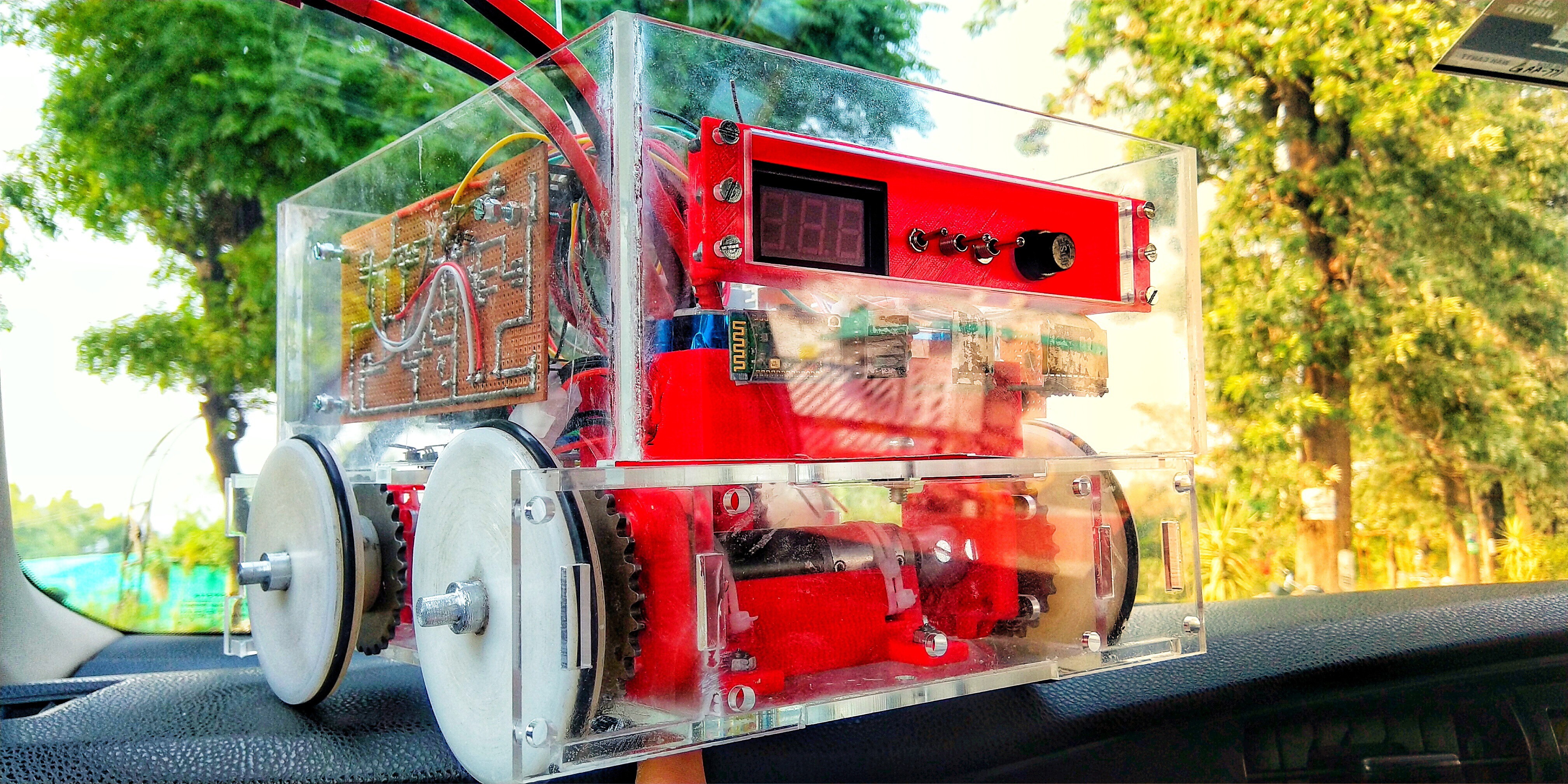
12:00 AM it was, I gave my A-level exam and everyone rushed out, hoping to have a great party at night but for me it was something different. I took the car and went straight to school and it was all empty. I called the principal that I wanted the labs to be opened so work on the robot can be started. She granted me the permission and lab was allocated. I called upon my team and they were there.
We were embarking on a journey to build a robot that would compete against 4th Year engineering students, who had come from all over Pakistan at NUST.
For me, every moment that toil for other, became deeply personal. We started with a paper and designed abstract mechanics. I encouraged the young team mates to come up with designs of their own but no one could help much. No one had ever built a robot before and no one had a clue where to start. We had to be very strategic as we had to learn a lot that our competitors had mastered over
years at university. This was a good time to recall Elon Musk’s words from an interview, “Let the physics drive the design.” This became the fundamental idea to tackle every approach.
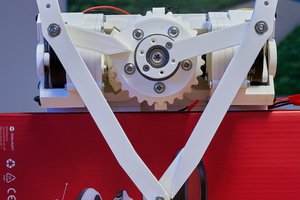
Starting out with the drive train, we modeled the entire system around two motors that would drive four wheels of the robot. Since the competition required us to build everything from scratch, we would use nothing pre-built, every bit of construction had to come from our own imagination. We just had 25 days to learn all the design software and electronics; thereby, we had to work and learn fast,
no matter what it took. We sketched all our ideas and short listed the ones that were best aligned with our budget and operational requirements. Finally, we landed the idea to use chain and sprocket mechanism to drive two wheels with one motor. Essentially, this made our design symmetrical. Realizing how difficult it
would be to make this drive-train without making tons of mistakes. Plethora of software were available to us, ranging from Autodesk 123D to Solidworks. Latter stood out as it allowed us to design various things in intricate ways, enabling us to detail our imagination to the point it seemed highly practical. I reckon the point where I sat in school at night modelling a tea-pot as it helped me get acquainted with the rights tools for design, which later became mission critical to project’s success.
The next day, we grabbed the local transport and went to the bike market, purchased all the sprockets and chains, brought them to school and started modelling them. Getting the pitch right for the sprocket was quite a challenge as it tested our CAD skills. Since the motor we used was salvaged, it had no encoders or documentation. We decided to check stall current. By attaching a wrench to shaft and adding ammeter in series with motor allowed us to measure the current when the motor was stopped by hand, data which later became crucial to H-Bridge design. To make the robot function at the best, we needed a rigid structure. We could have an aluminum, acrylic, or wood. This was where we chose acyclic as it was hard and easy to work with. It gave us the freedom to use Laser Cutter, which being an indispensable tool, allowed us to make precision cuts. Design revision and iteration became fast. We could change any part by tweaking dimensions in the software and get it lasered under ten minutes. Laser cutters were not cheap and we had to convince a larger company to allow us to use theirs.
I always loved to print part on my 3D Printer to remedy the broken in my home, but this where it became essential component of our project. It gave us the freedom to make just about anything we imagined, therefore, we designed all the parts from bearing pillows to braces, all on 3D printer. The best thing I discovered was the topology study feature that could’ve allowed me to reduce the weight
of my robot ten times without sacrificing performance. I always had the leverage to use machines such as CNC, Laser Cutter, and Lathe. These skills that...
 Vadim
Vadim
 Darren V Levine
Darren V Levine
 Nathan Peterson
Nathan Peterson