 matop
matopHere are some news of the project, for now IMU calibration is paused, I have been mainly working to set ROS on the SBC.
SBC
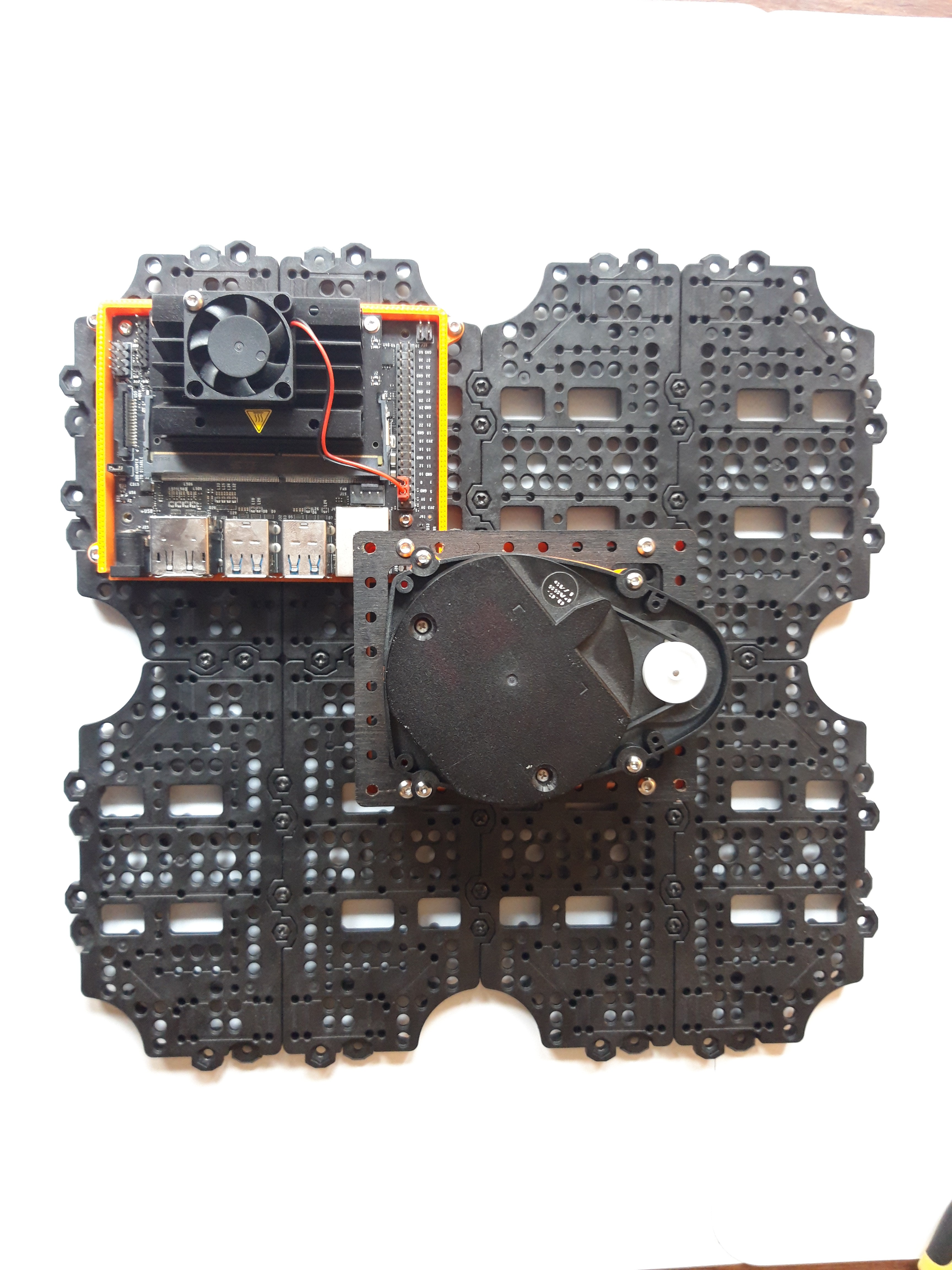
The one I chose is the popular Jetson Nano from Nvidia, which offers a powerful CPU/GPU in a small form factor. It doesn't include WIFI chip by default, so you need to choose one, mine is something like TPLink WN822N, I am totally not able to know if it's a choice or not. The Jetson is mounted on the upper plate.
Jetson Nano comes with a specific OS based on Ubuntu 18.04, it includes precompiled libraries using the onboard GPU. I installed ROS on it and set the rosserial communication with the Arduino Due.
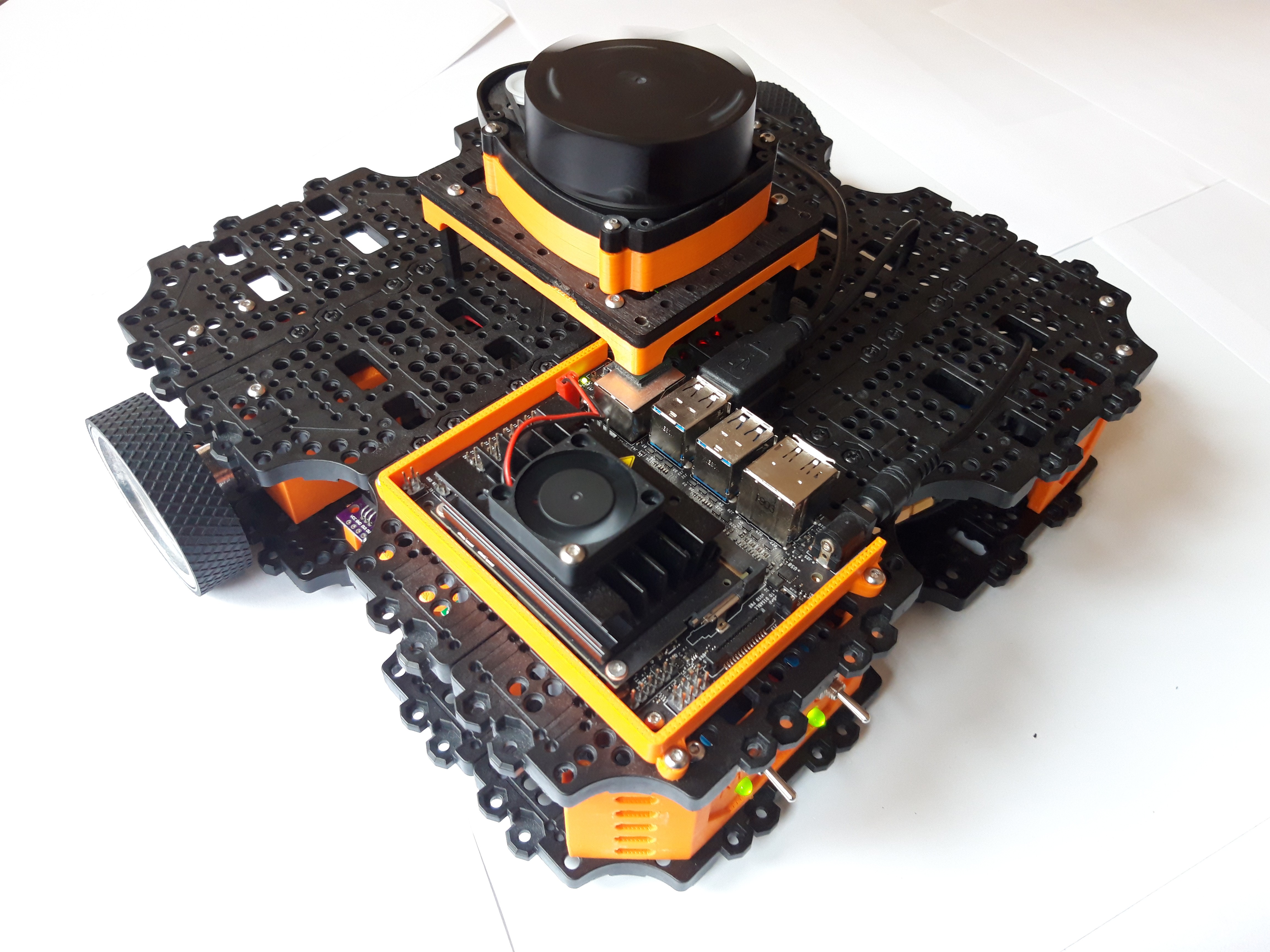
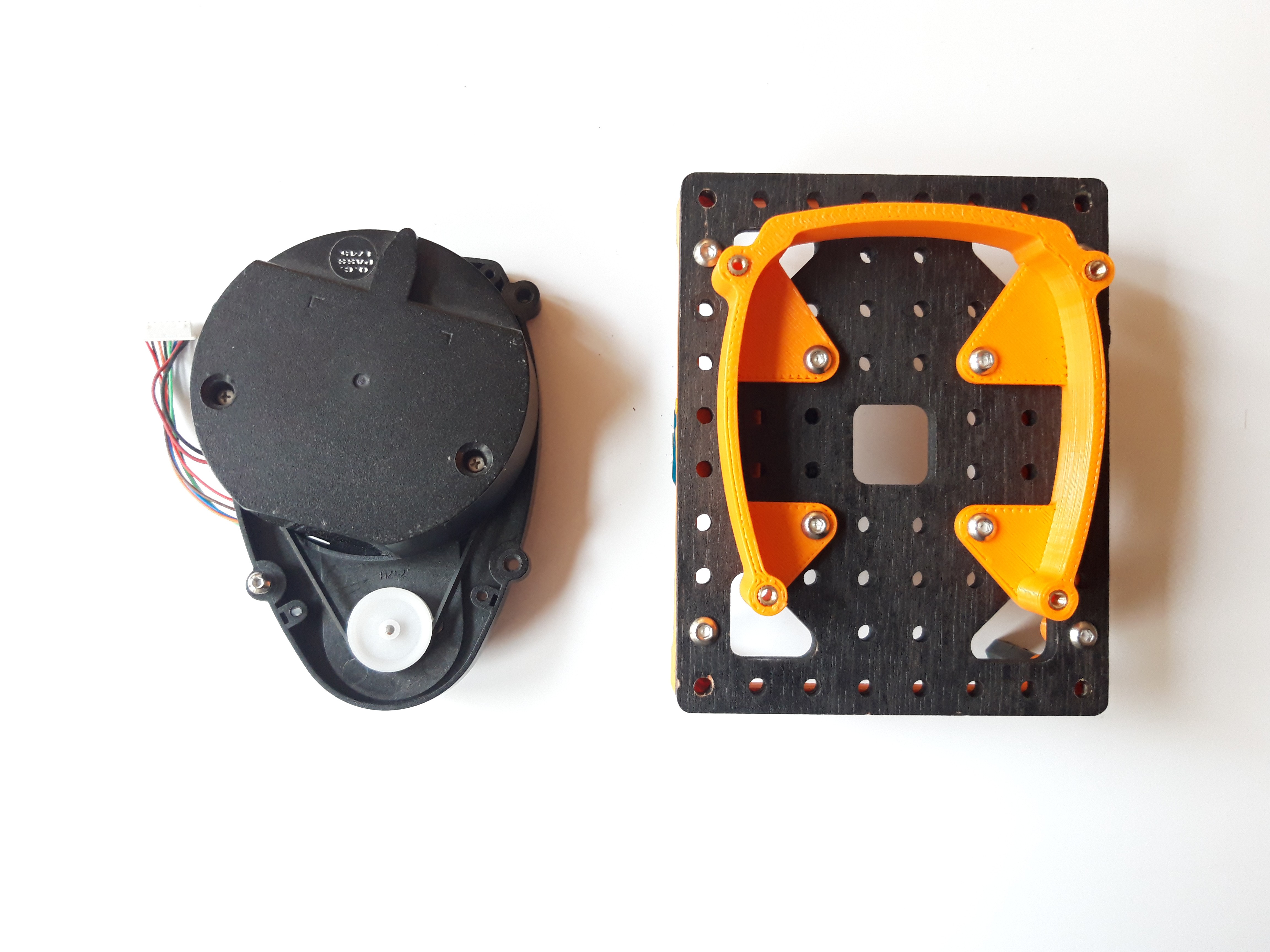
LIDAR
The LIDAR is the LDS01, it is the same that the original TurtleBot3. It is mounted centered on top of the upper plate with a specially designed 3D part (available in project resources). In comparison with the RPLIDAR A2, it seems to have a lower range.
Arduino Code
The Arduino core script running on DUE is now available on github. For now it includes:
- velocity commands subscriber
- kinematic that transform velocity in body frame to wheel rate
- rate controller based on PID (described in previous log)
- odometry publisher
Some extra libraries are still needed to compile the code and will be added soon.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
this is a great project. Have you been able to continue on it given ... everything?
Are you sure? yes | no
Thanks, the lockdown kept me away from my robot :( But I plan to continue during the winter!
Are you sure? yes | no