 Duane Degn
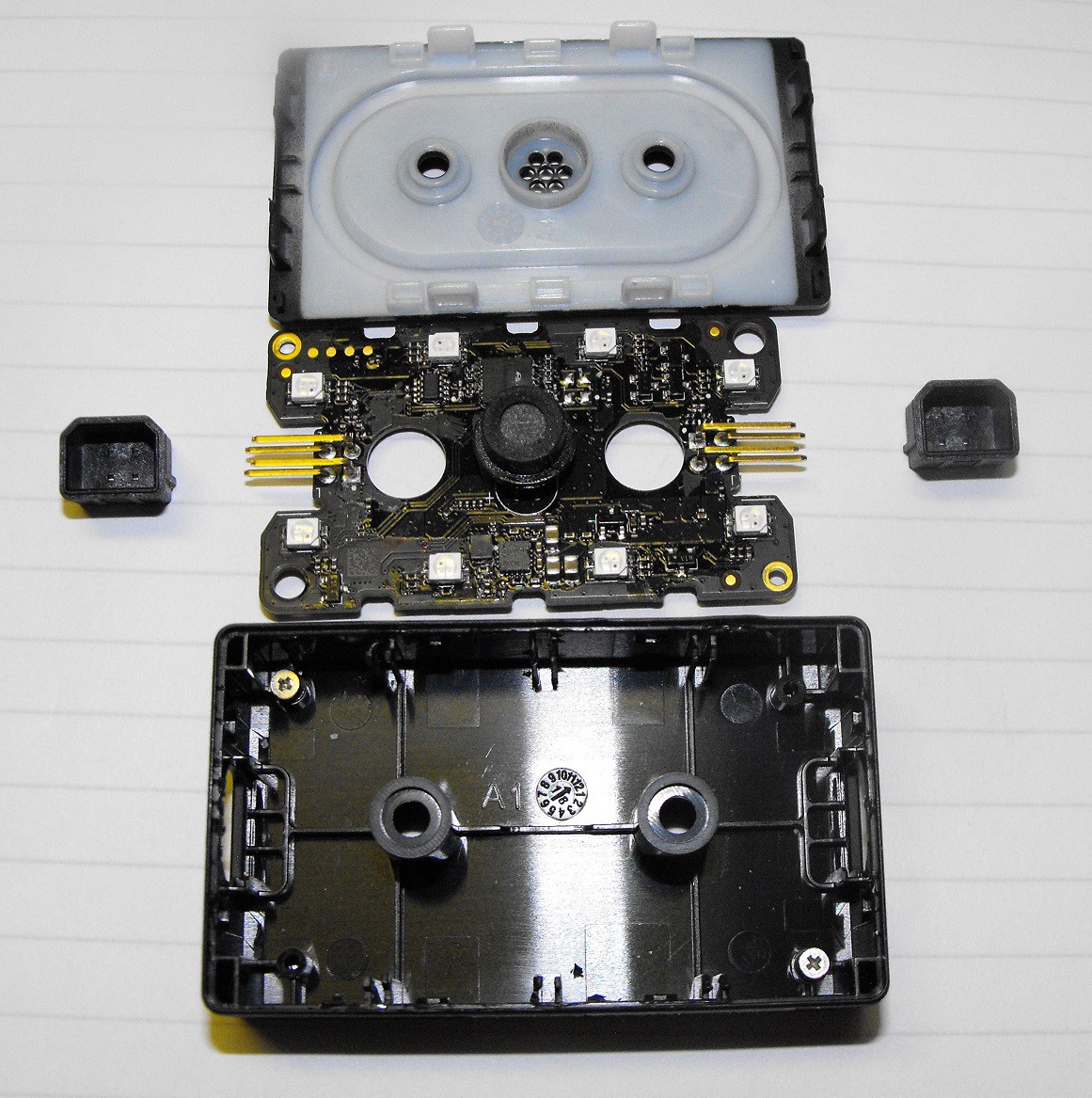
Duane DegnI'm attempting to figure out ways of hacking the Robomaster S1 platform. This includes investigating the hardware and the communication protocol used by the robot.
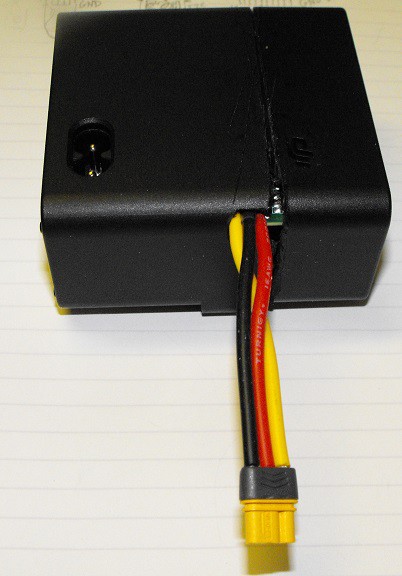
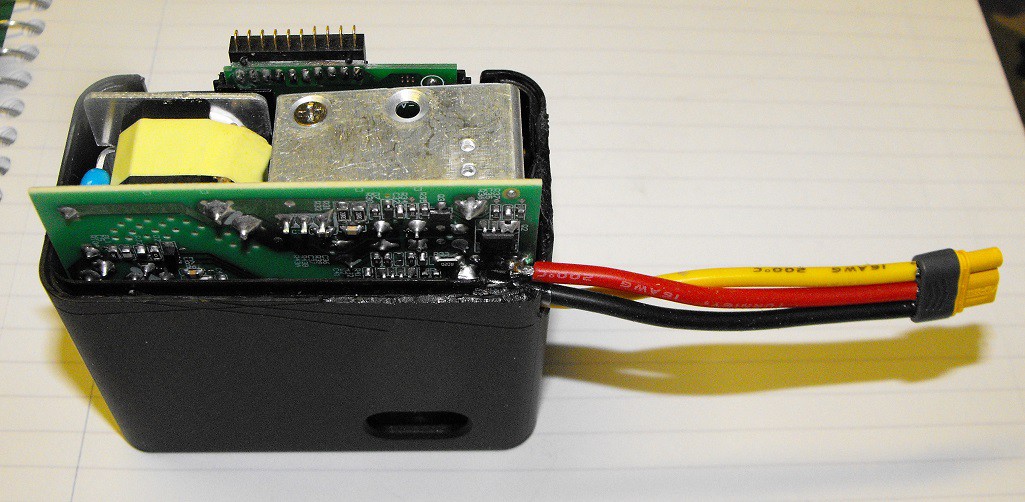
See the Log titled Battery Investigations for photos of the battery internals.
List of Identified Components
Shared Components:
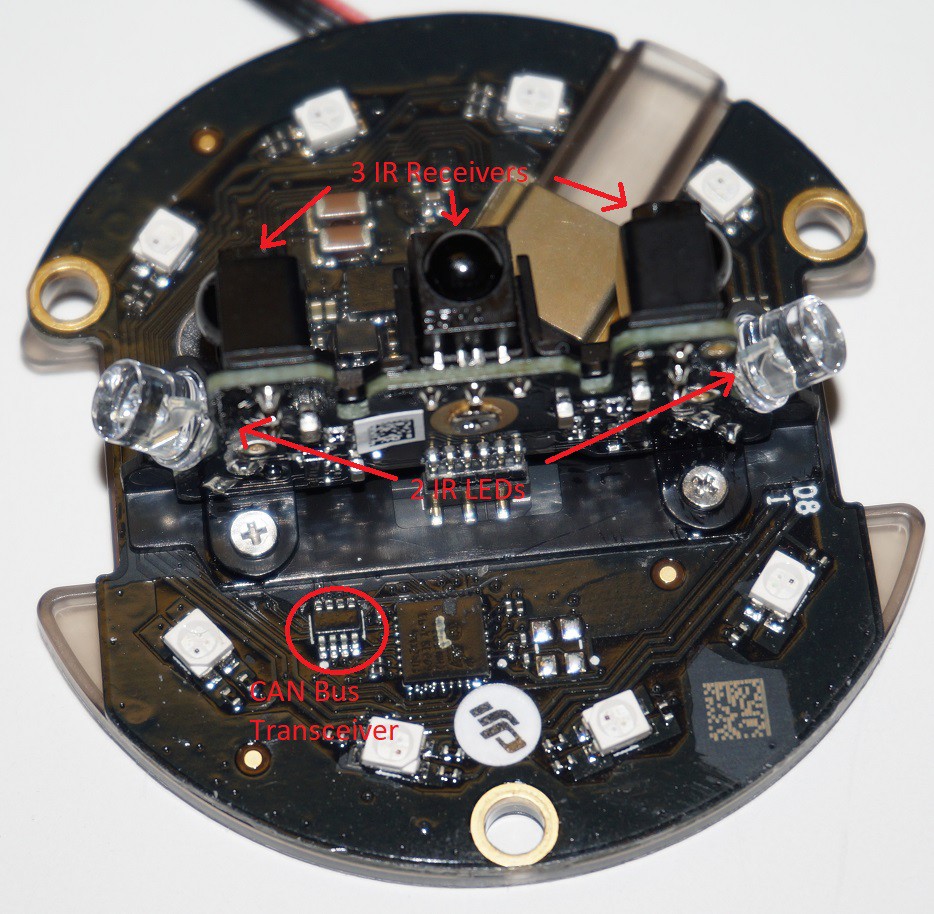
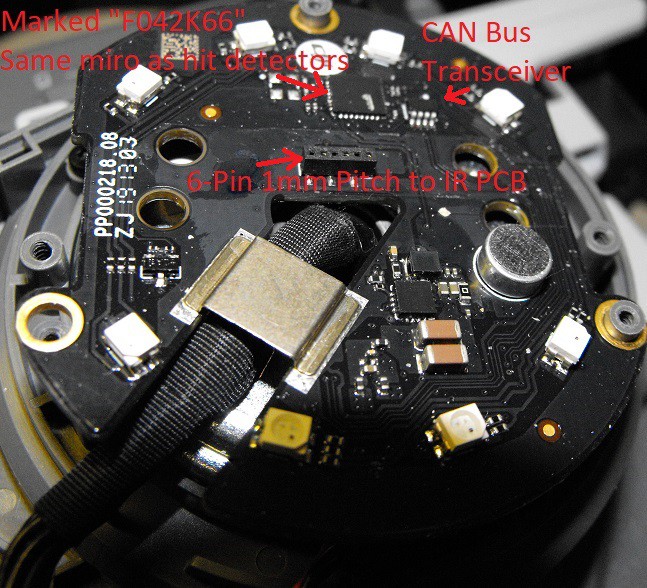
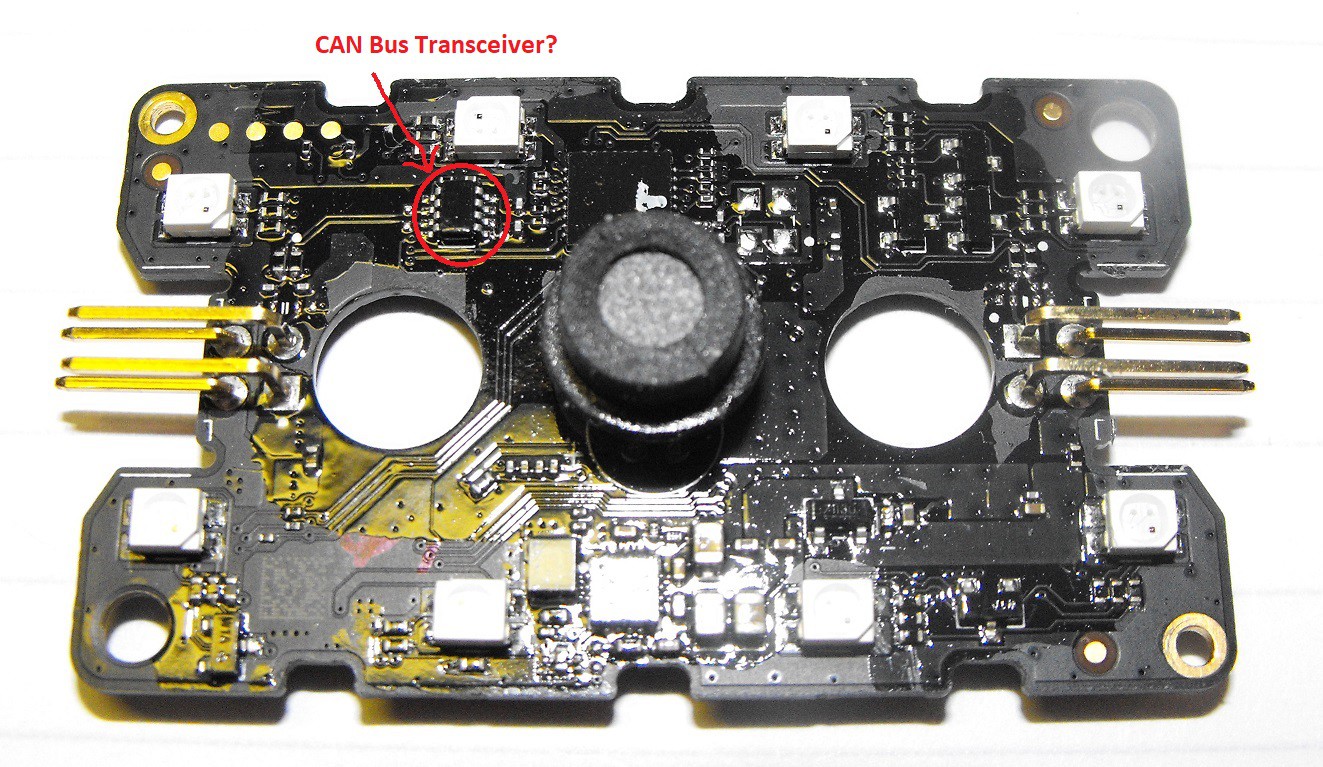
Intelligent Controller, Motion Controller, Hit Detectors, Turret Hit Detectors, Turret Base, Turret Tilt Control:
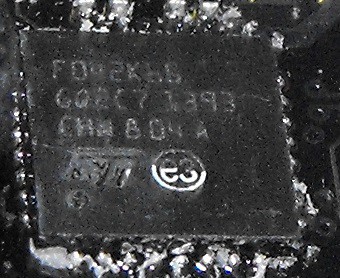
Maxim Inc. CAN Bus Transceiver MAX3051EKA+Tj: Mouser Part, Datasheet(pdf), easier to solder part.
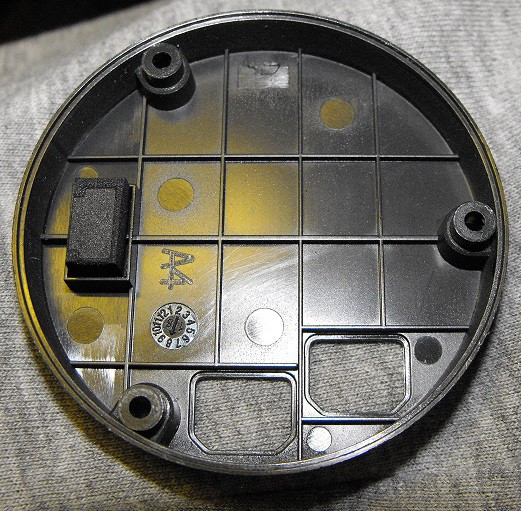
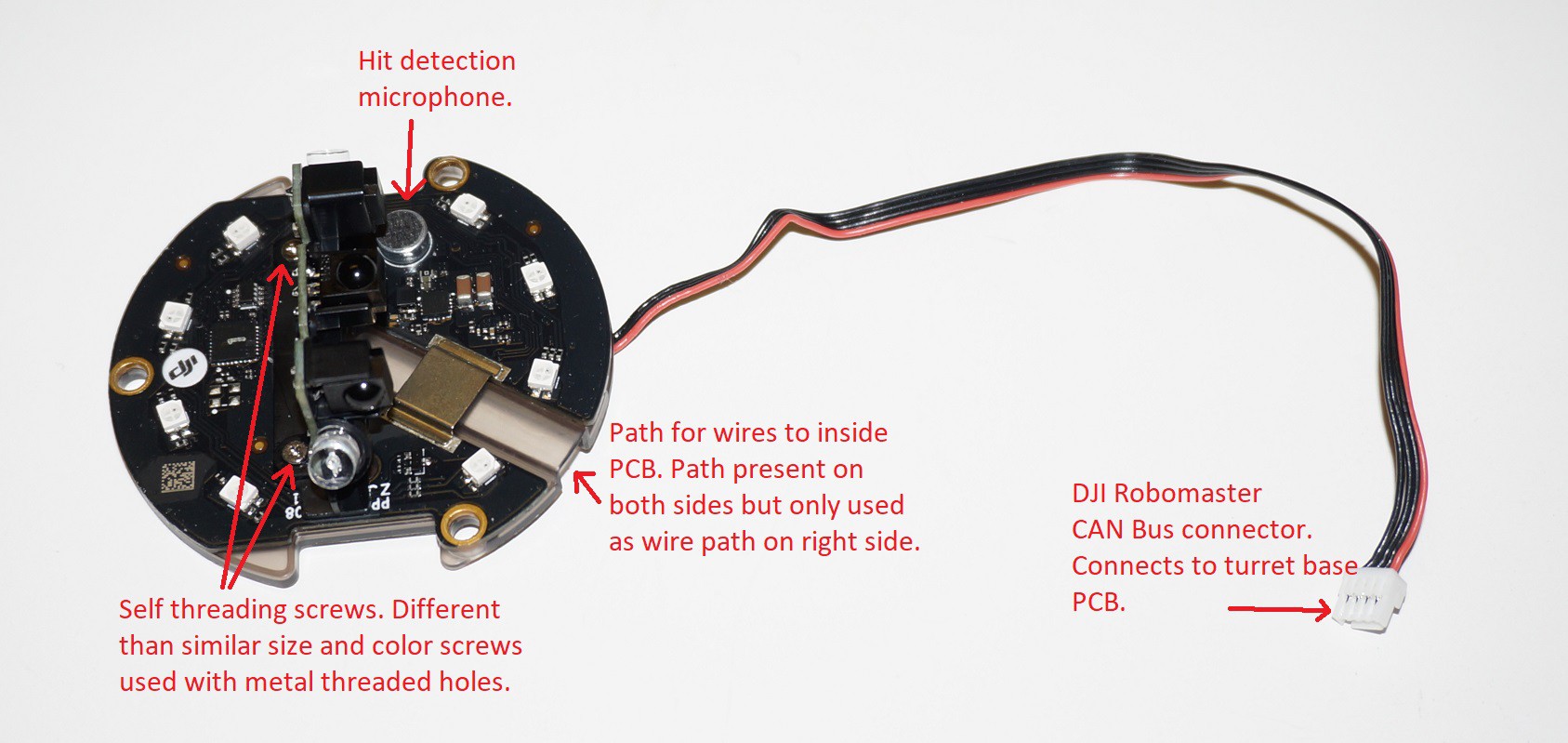
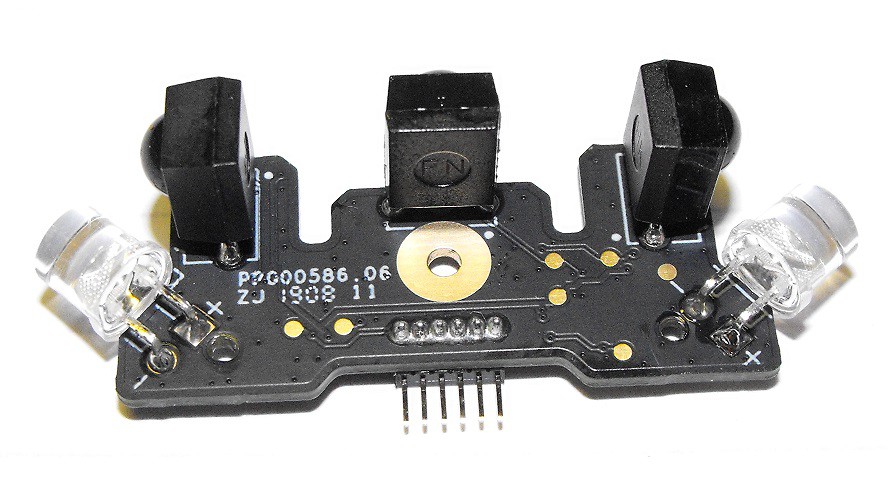
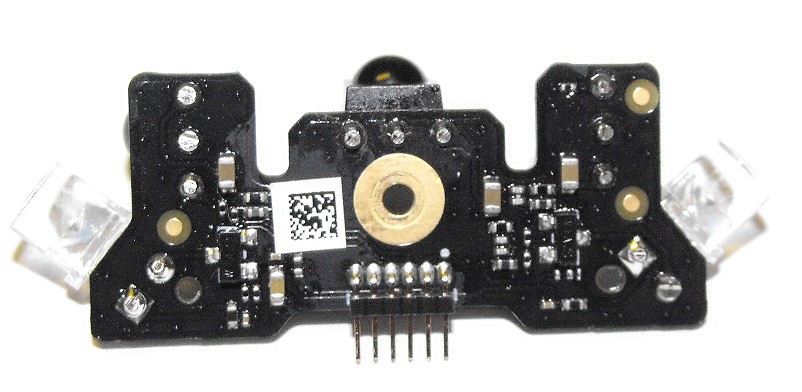
Hit Detectors, Turret Hit Detectors:
STM32F042K6 (Package UFQFPN32): Mouser Part, Datasheet(pdf), easier to solder part.
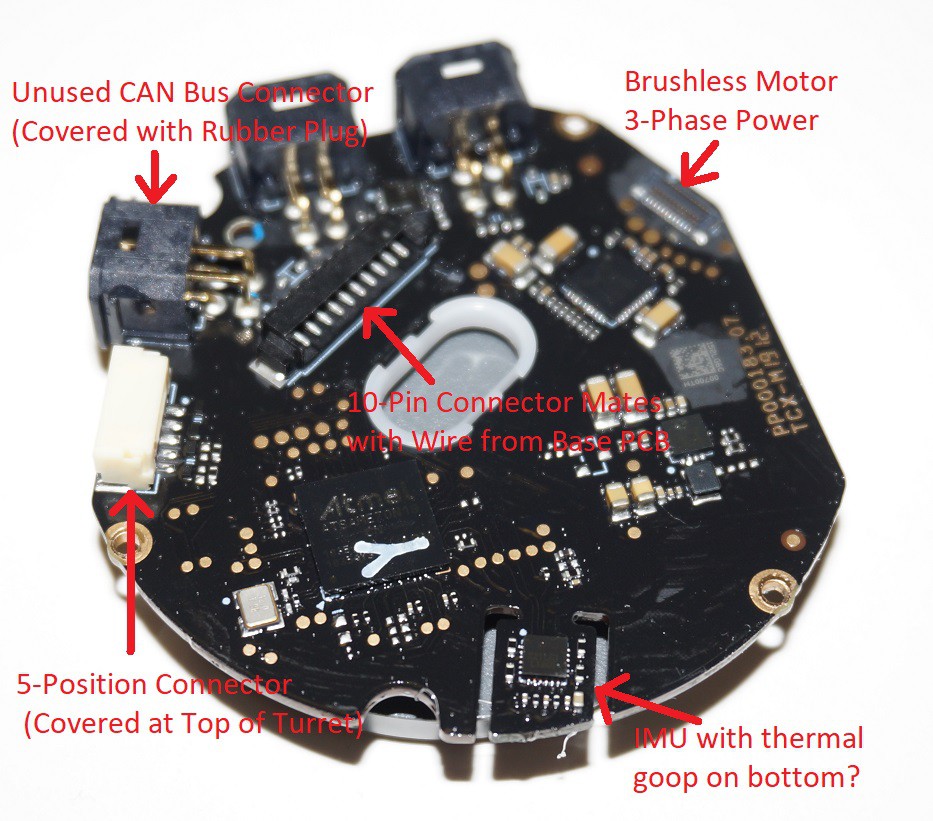
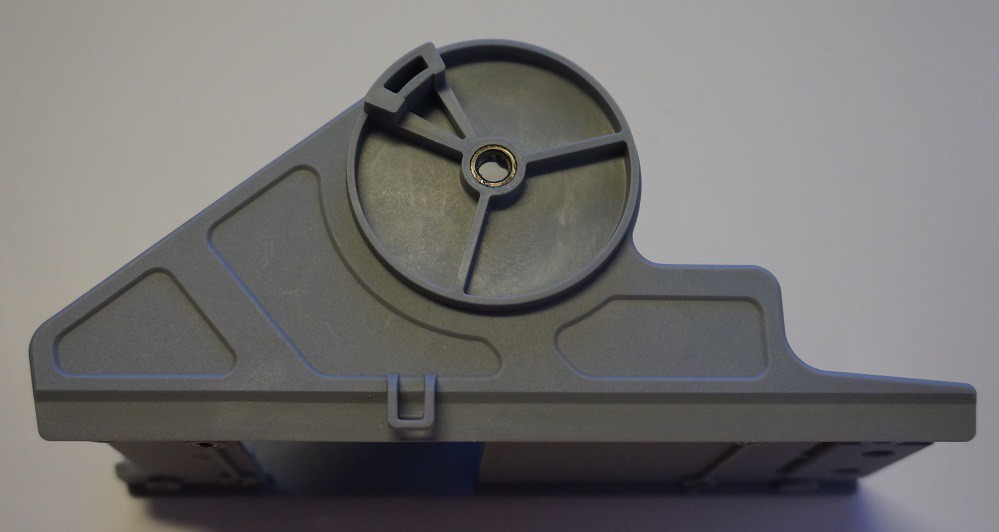
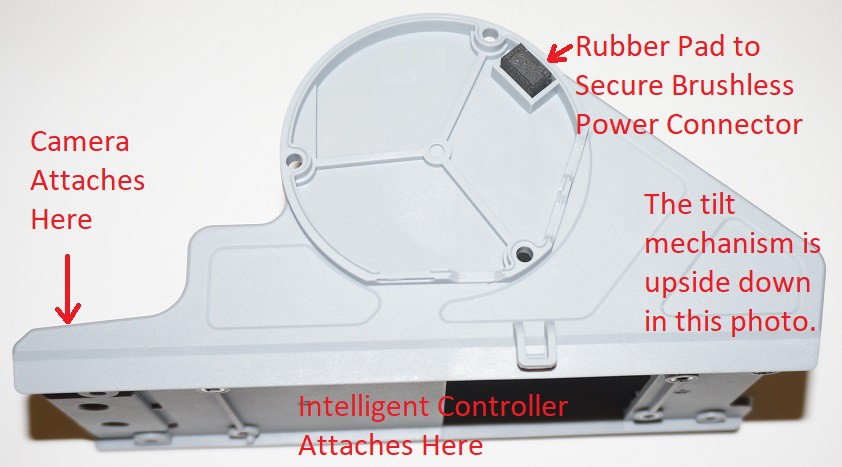
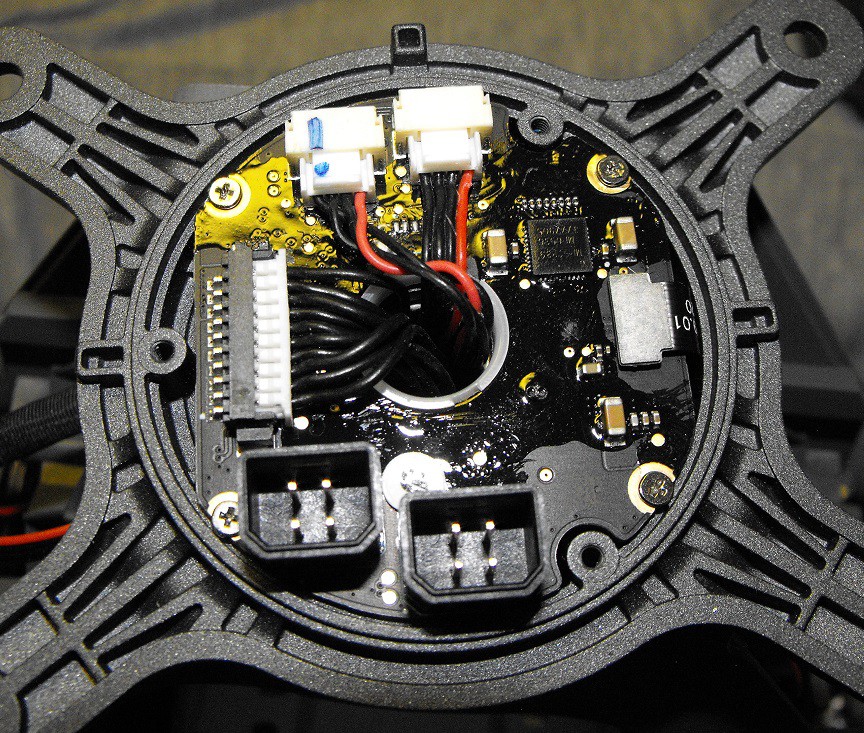
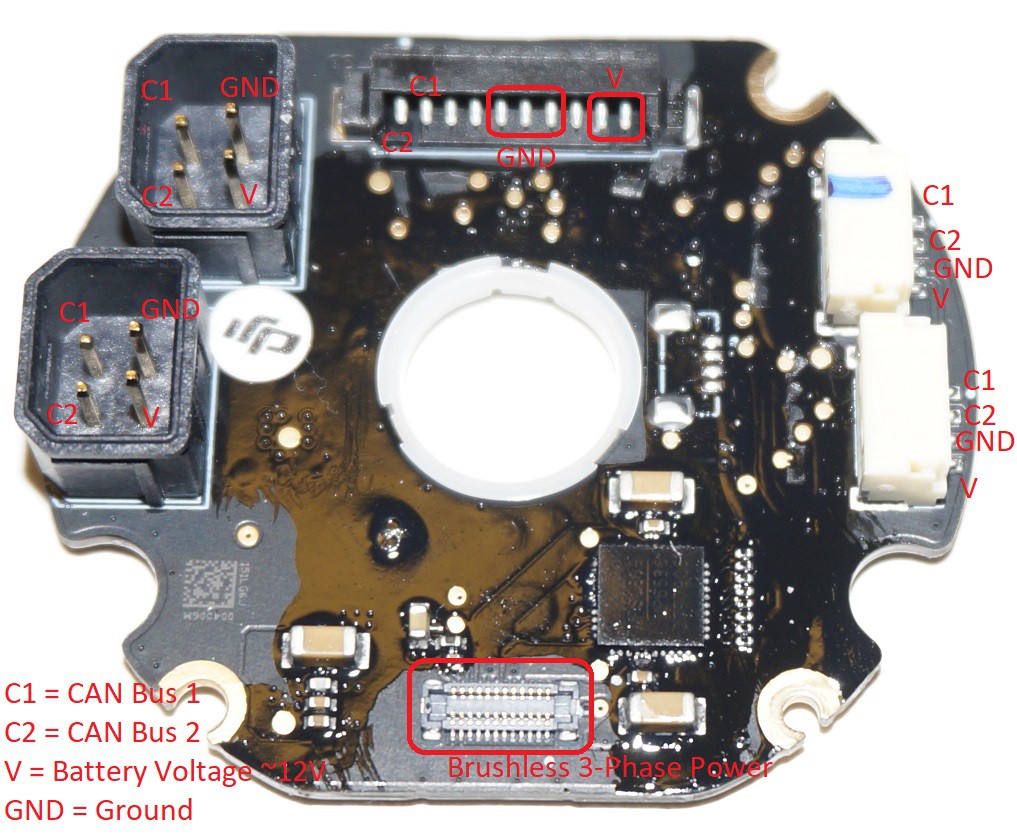
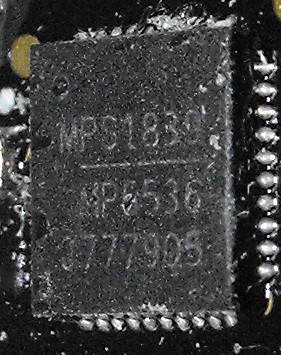
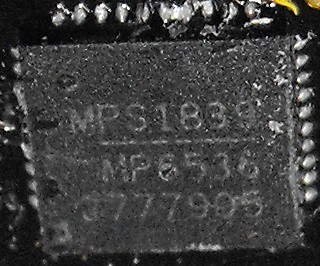
Turret Base, Turret Tilt Control:
Brushless motor control MP6536: Datasheet
Single Use Components:
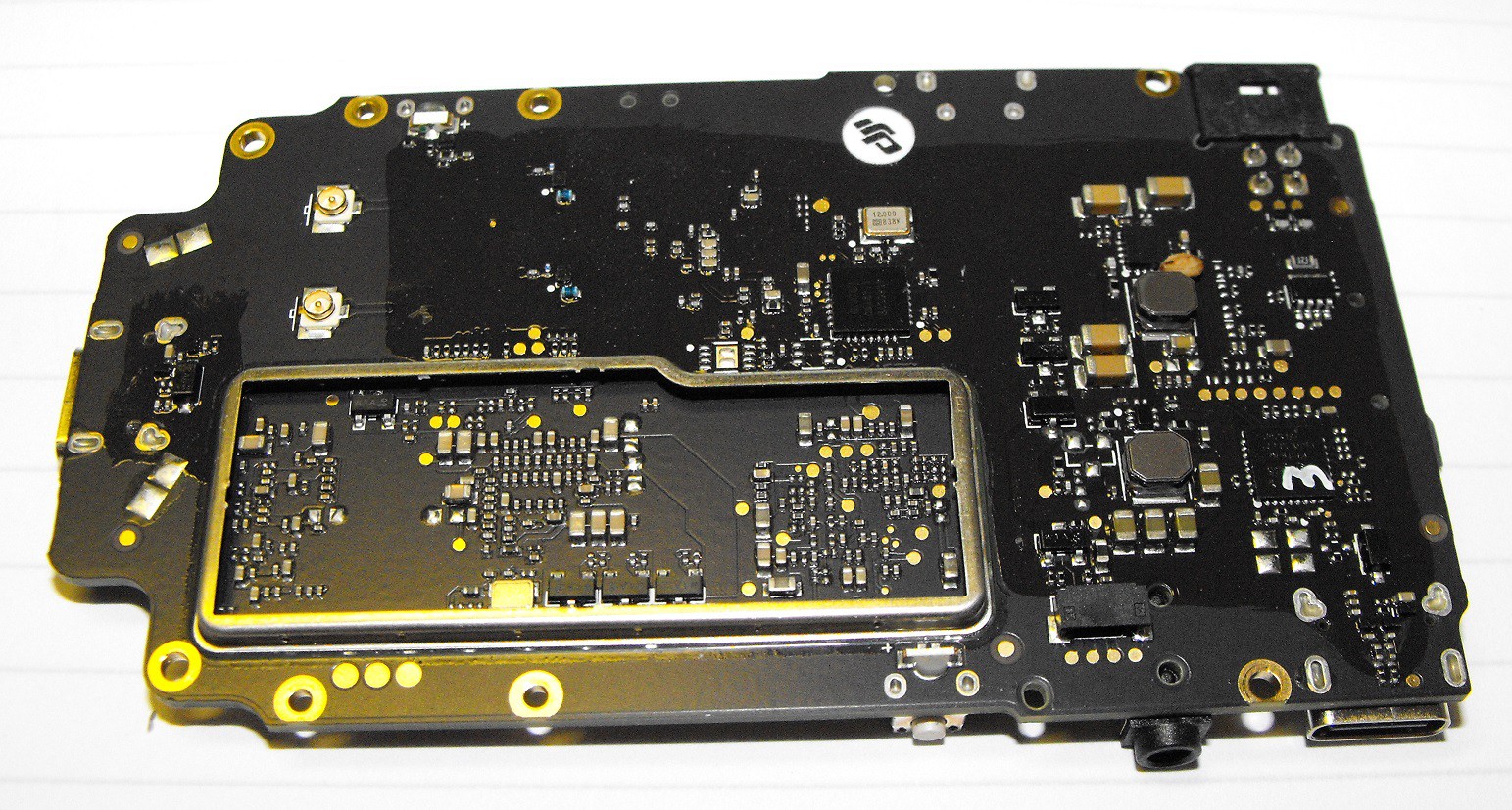
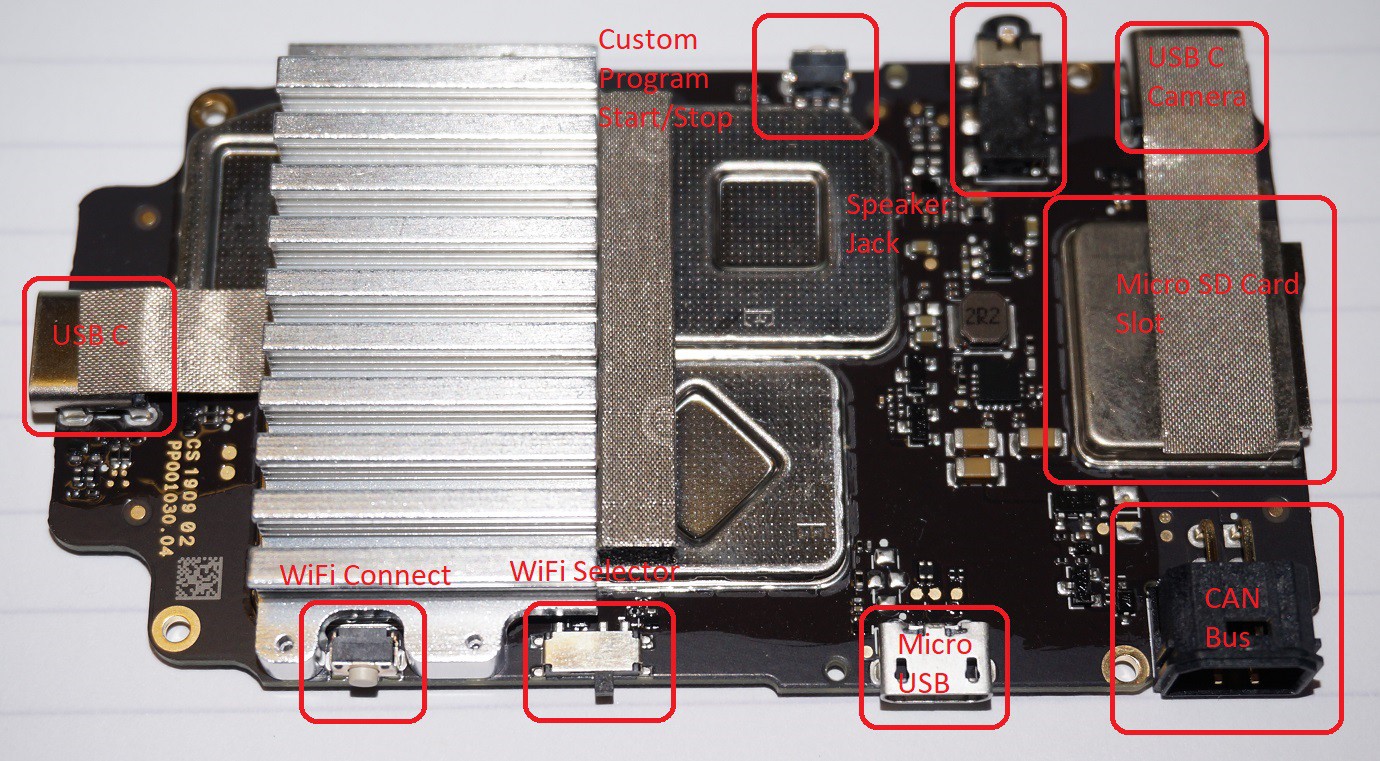
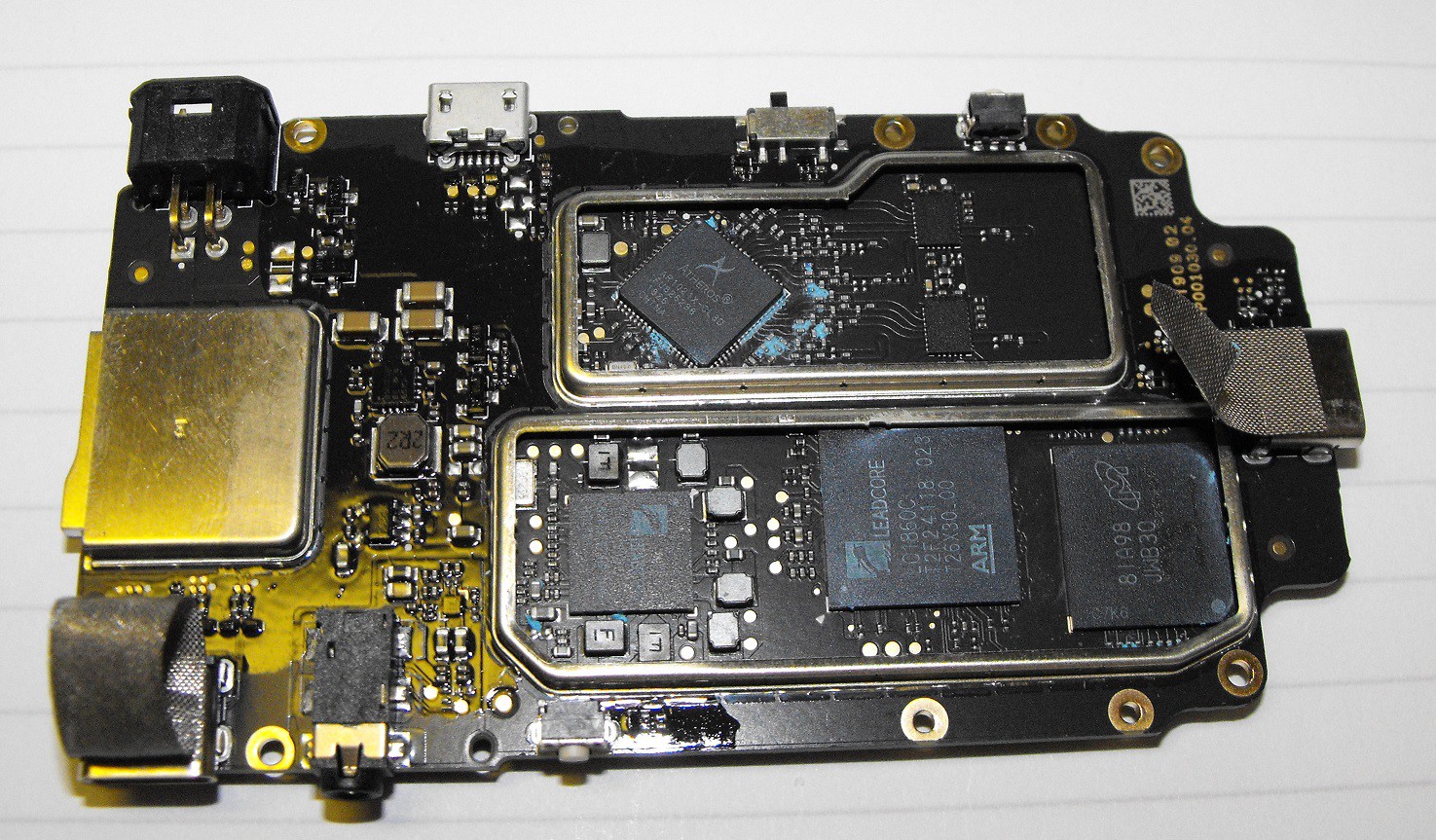
Intelligent Controller:
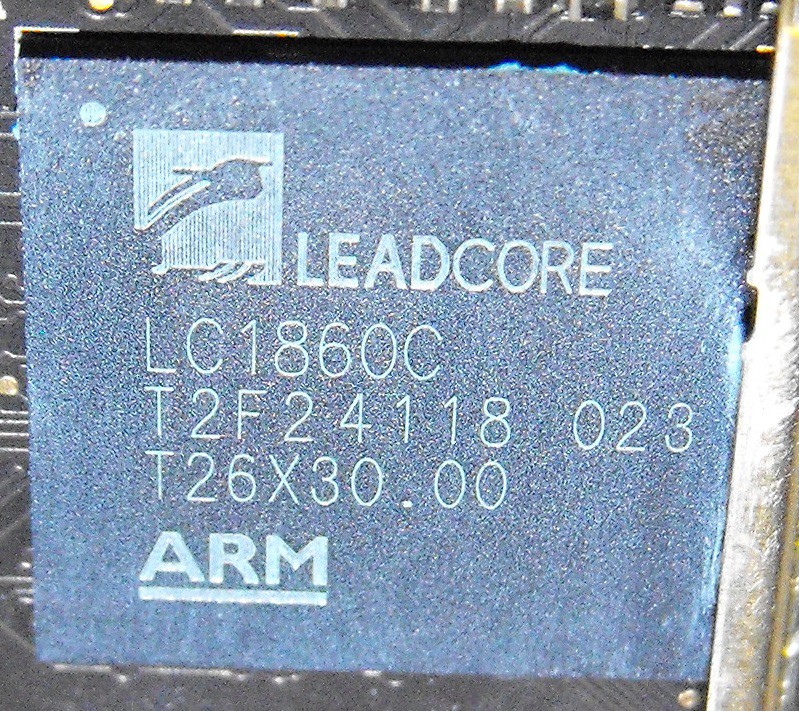
InnoPower LC1860C: Datasheet
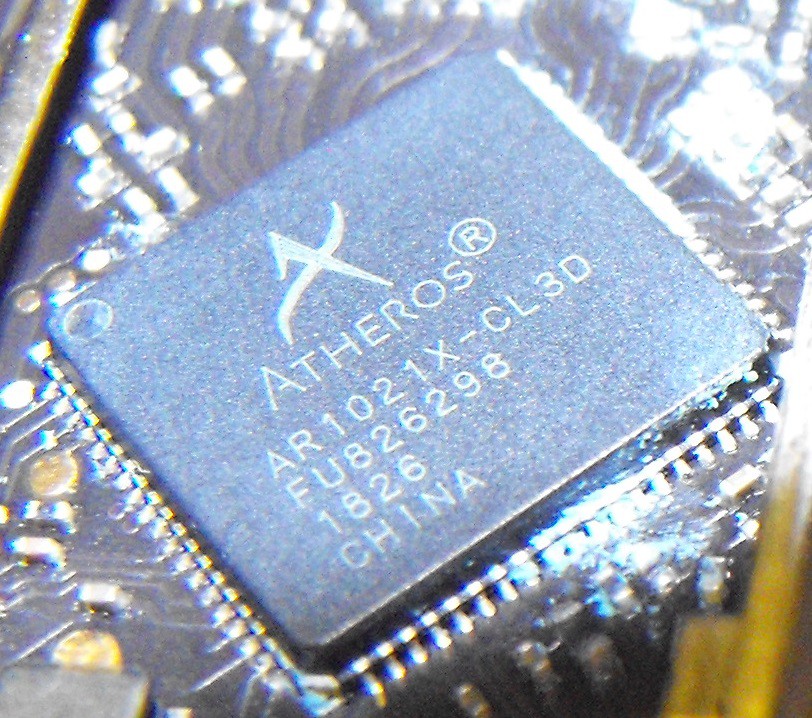
Atheros AR1021X WiFi Chip: USB WiFi Board using this chip (on Aliexpress).
Micron Memory Chip: Unclear about details of chip.
Motion Controller:
Main Microcontroller MIMXRT1021CAF4A: Mouser Part, Datasheet(pdf)
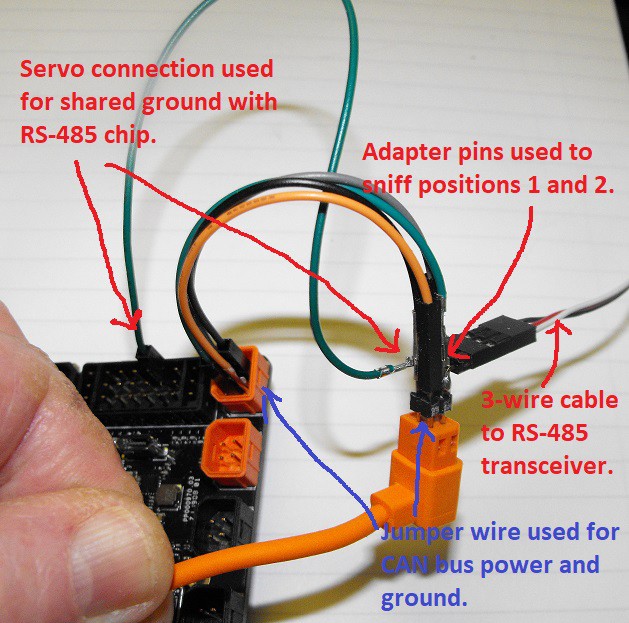
2 x RS-485 Transceiver SN65HVD75DRBR: Mouser Part, Datasheet(pdf), easier to solder part.
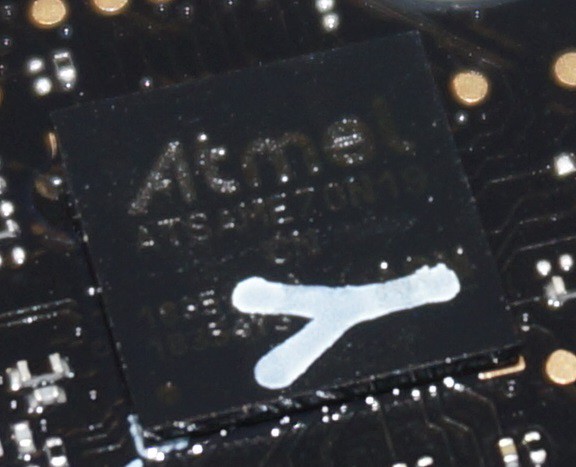
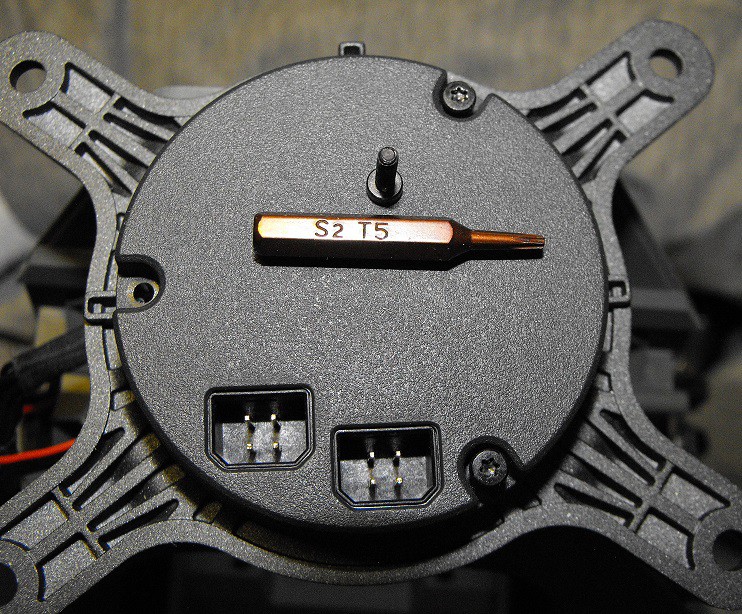
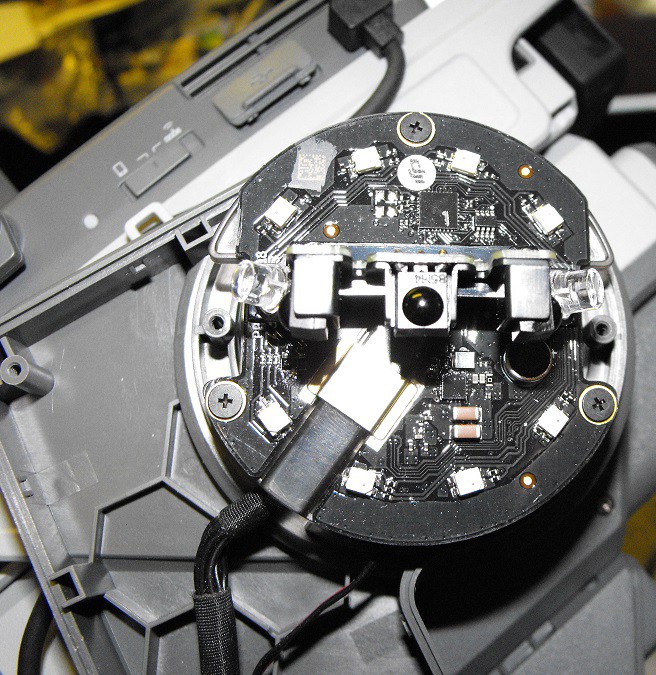
Turret Tilt Control:
Atmel ATSAME70N19 Microcontroller: Datasheet.





























 Nick Ames
Nick Ames
 Andrey Kalmatskiy
Andrey Kalmatskiy
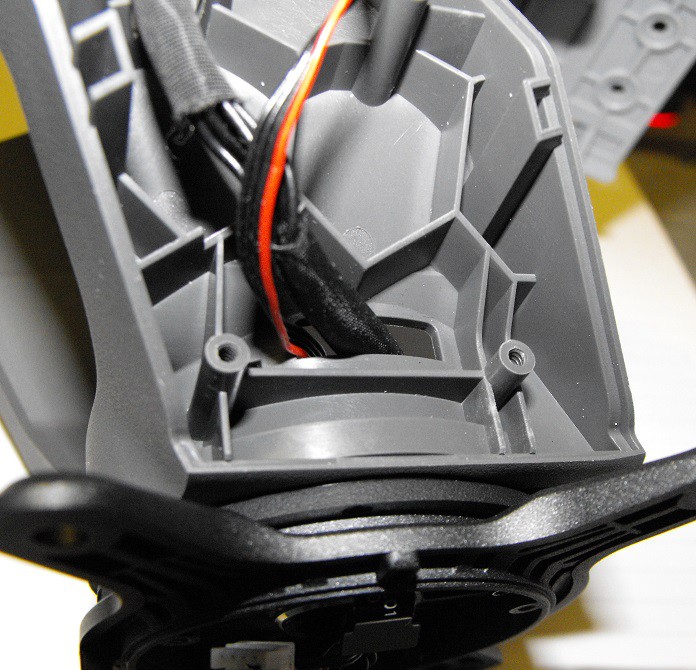
If you have canbus issues with you robomaster and your wiring is OK then watch this Video. https://youtu.be/rIiF0I7LT-g it is also a gimba teardown.