-
Android App
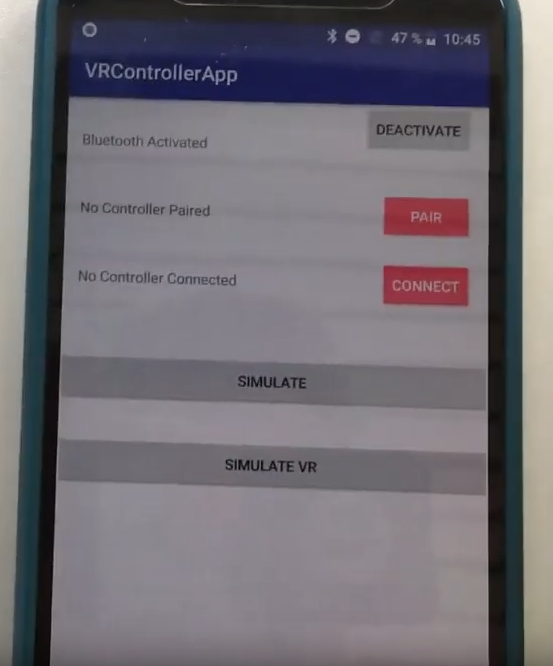
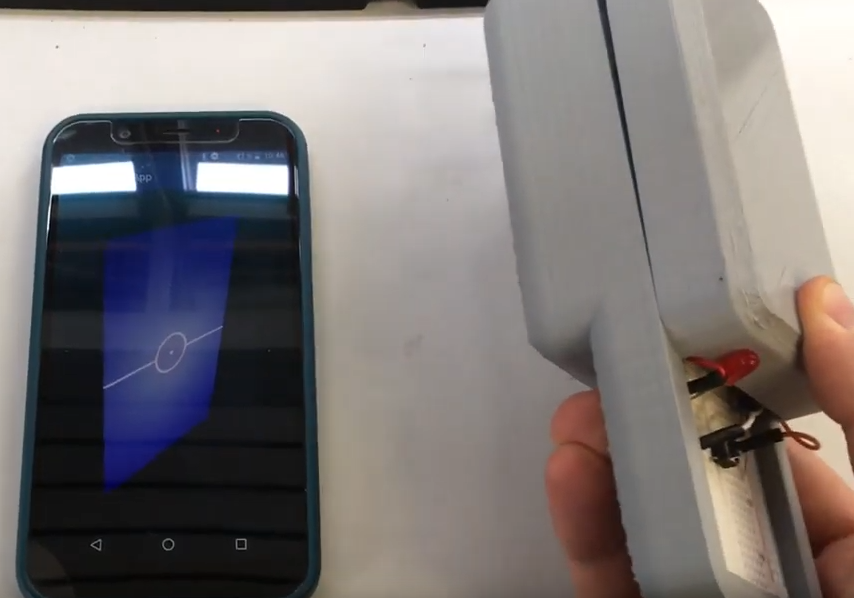
10/10/2019 at 19:11 • 0 commentsAn Android App was created with which the user can activate Bluetooth, pair and connect with the device. By click on "Simulate" a virtual 3D plane is drawn that can be moved and rotated by the controller.
![]()
As can be seen in the video above (in description), corrected roll and pitch are fairly accurate while yaw angle has some drift. Meanwhile integration of translatory acceleration is not very accurate right now. These issues could be solved by using a 9 axes IMU rather than 6 axes.![]()
The code can also be found in the Github repository.
-
Arduino Code
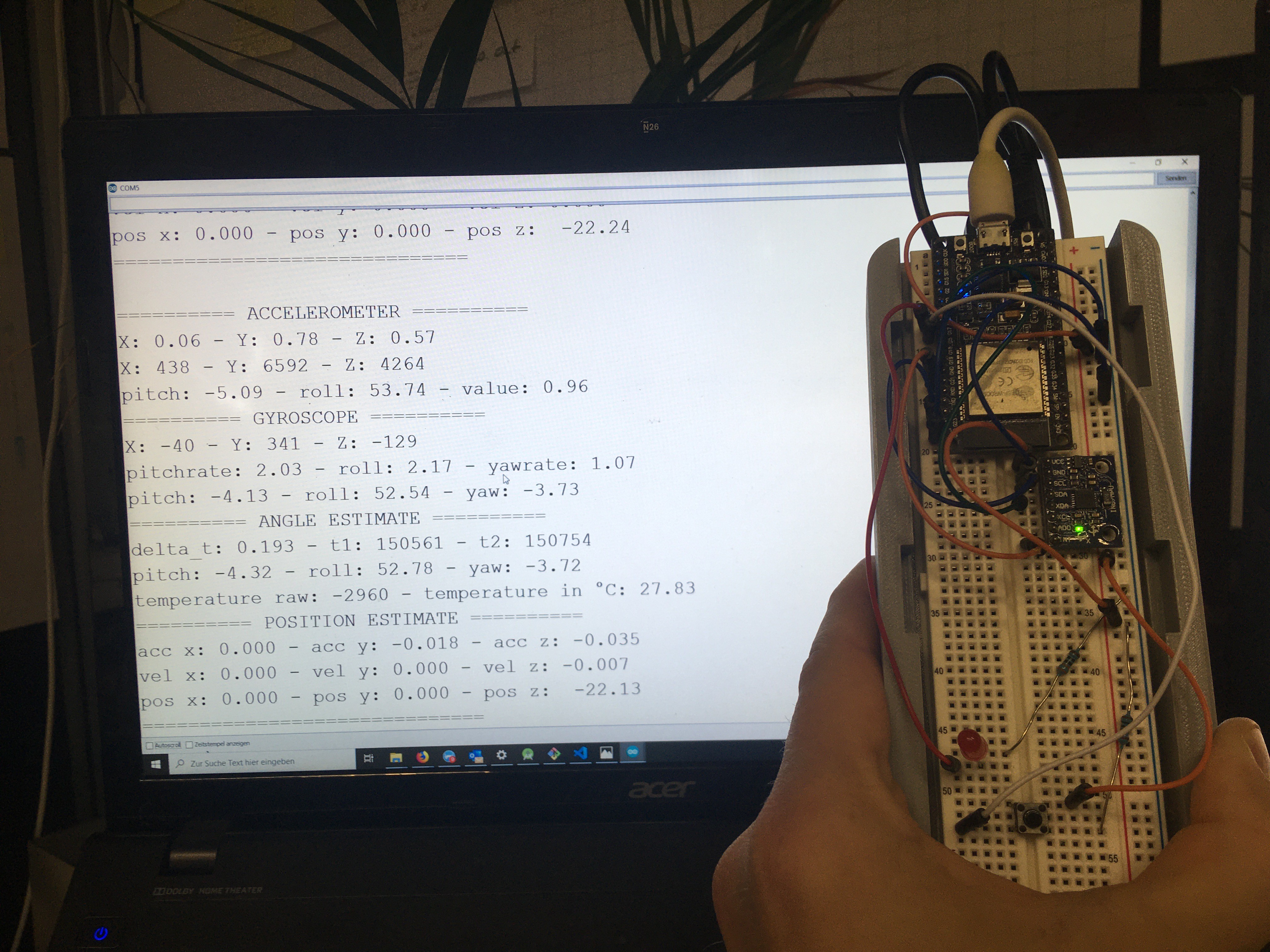
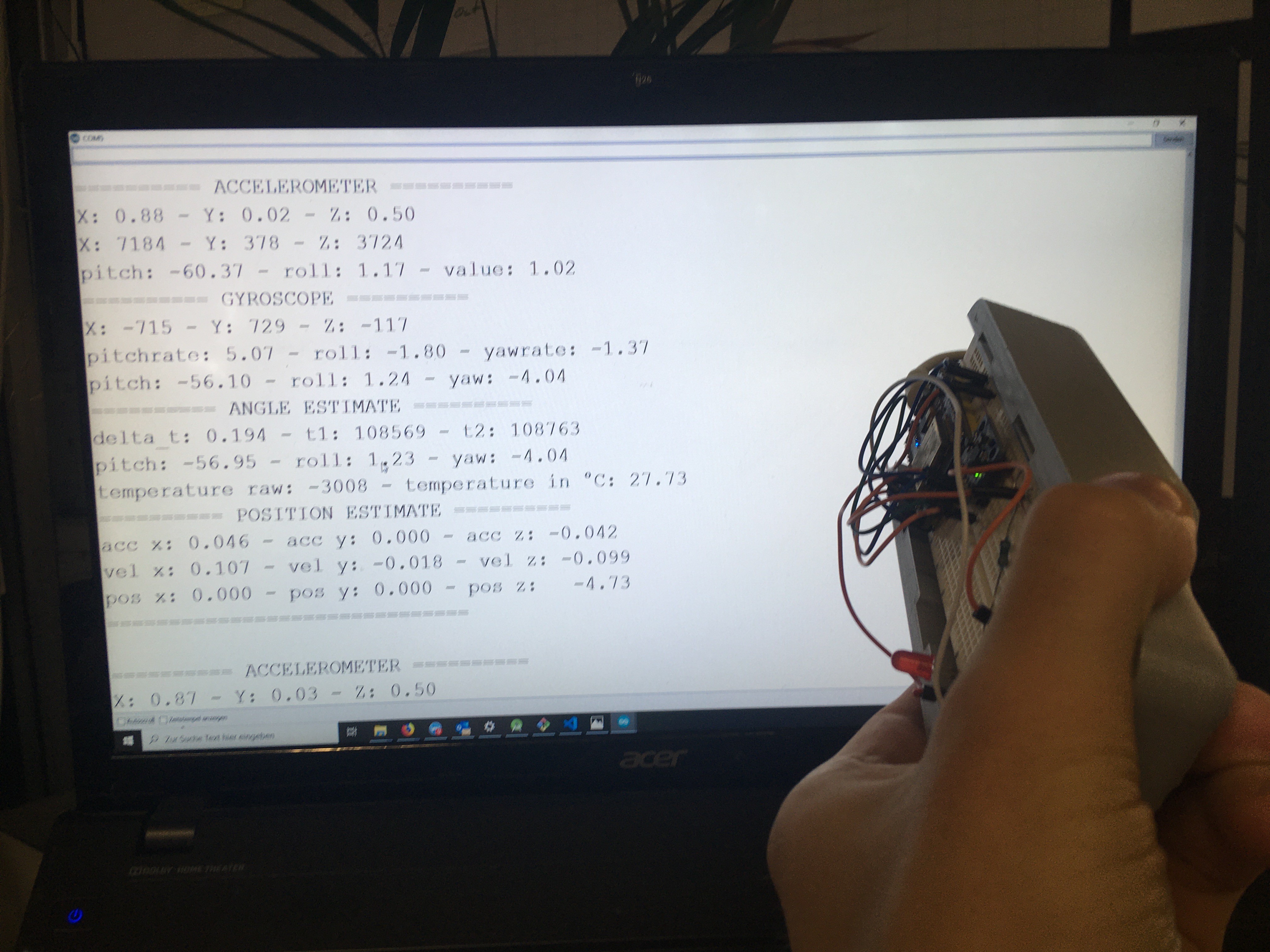
10/10/2019 at 18:51 • 0 commentsSoftware for ESP32: Gather motion data from gyroscope and accelerometer (translational acceleration in x/y/z and rotation rate around x/y/z). Calculate X/Y/Z position and roll/pitch/yaw angles by integrating over time. Drift of roll and pitch angles is corrected by accelerometer measurements.
![]()
![]()
The data is compressed and sent via Bluetooth Low Energy in short intervalls. Arduino Code for the ESP32 can be found in attached Github repository.
![]()
-
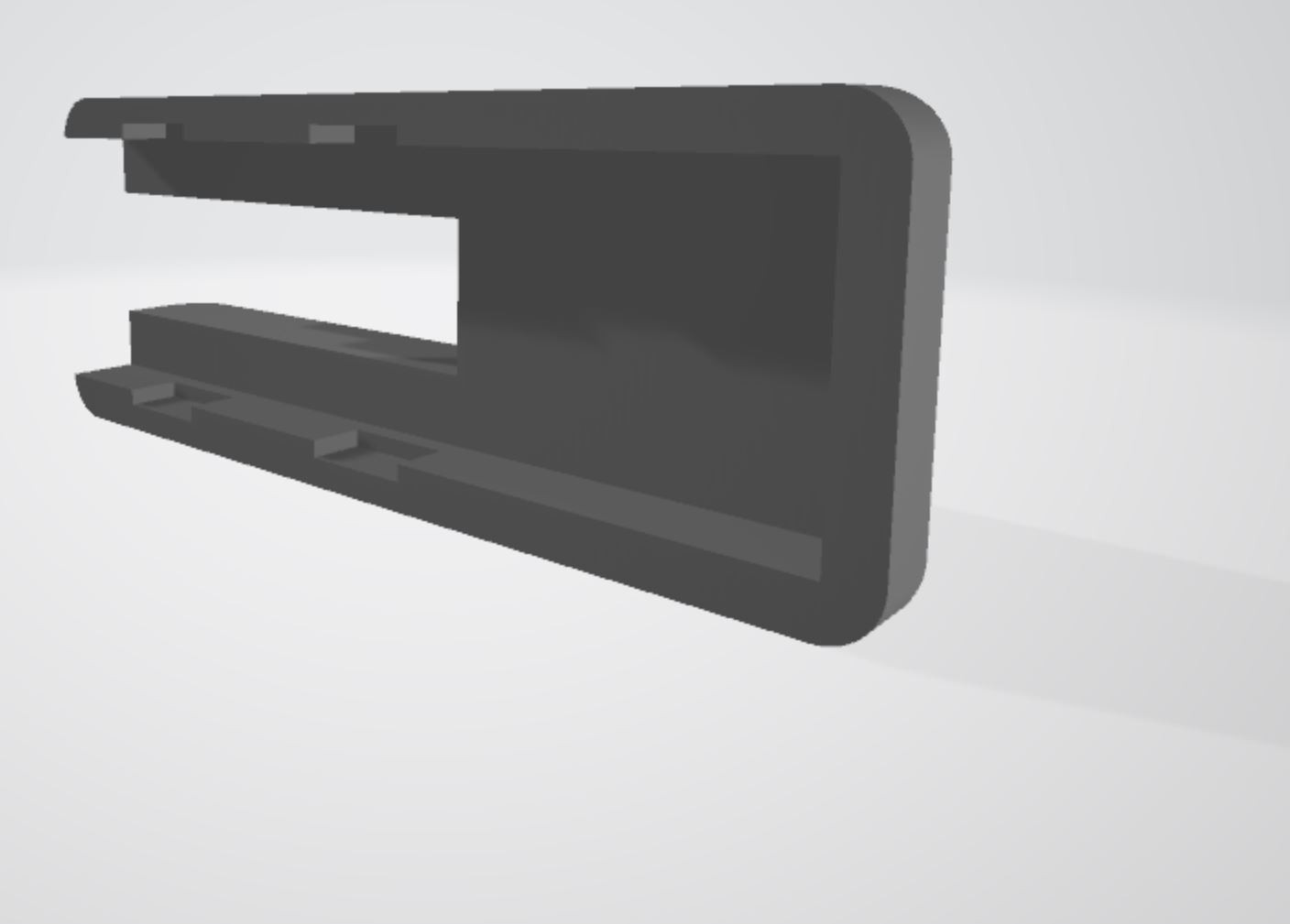
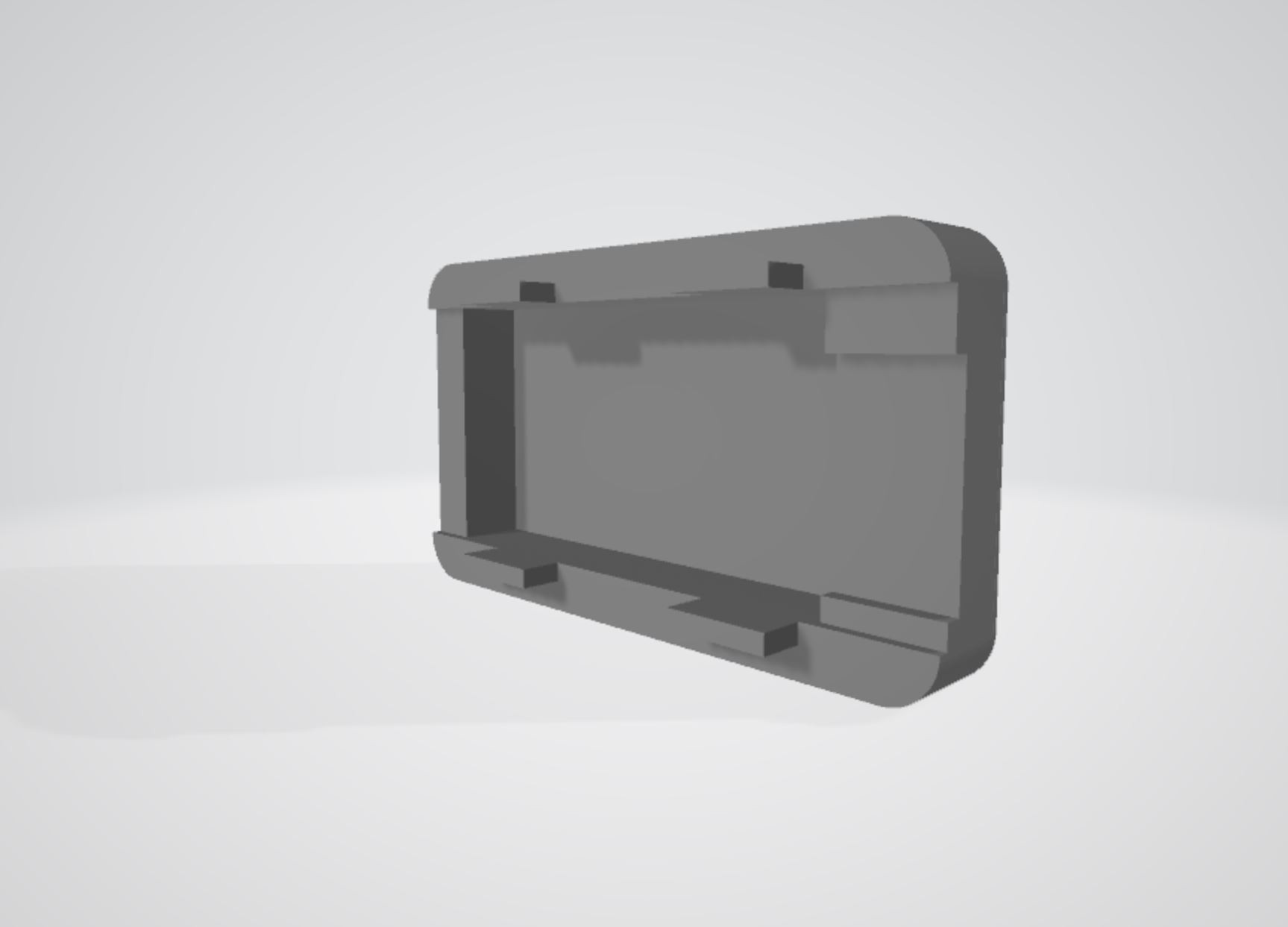
Plastic casing
10/10/2019 at 16:07 • 0 comments![]()
![]()
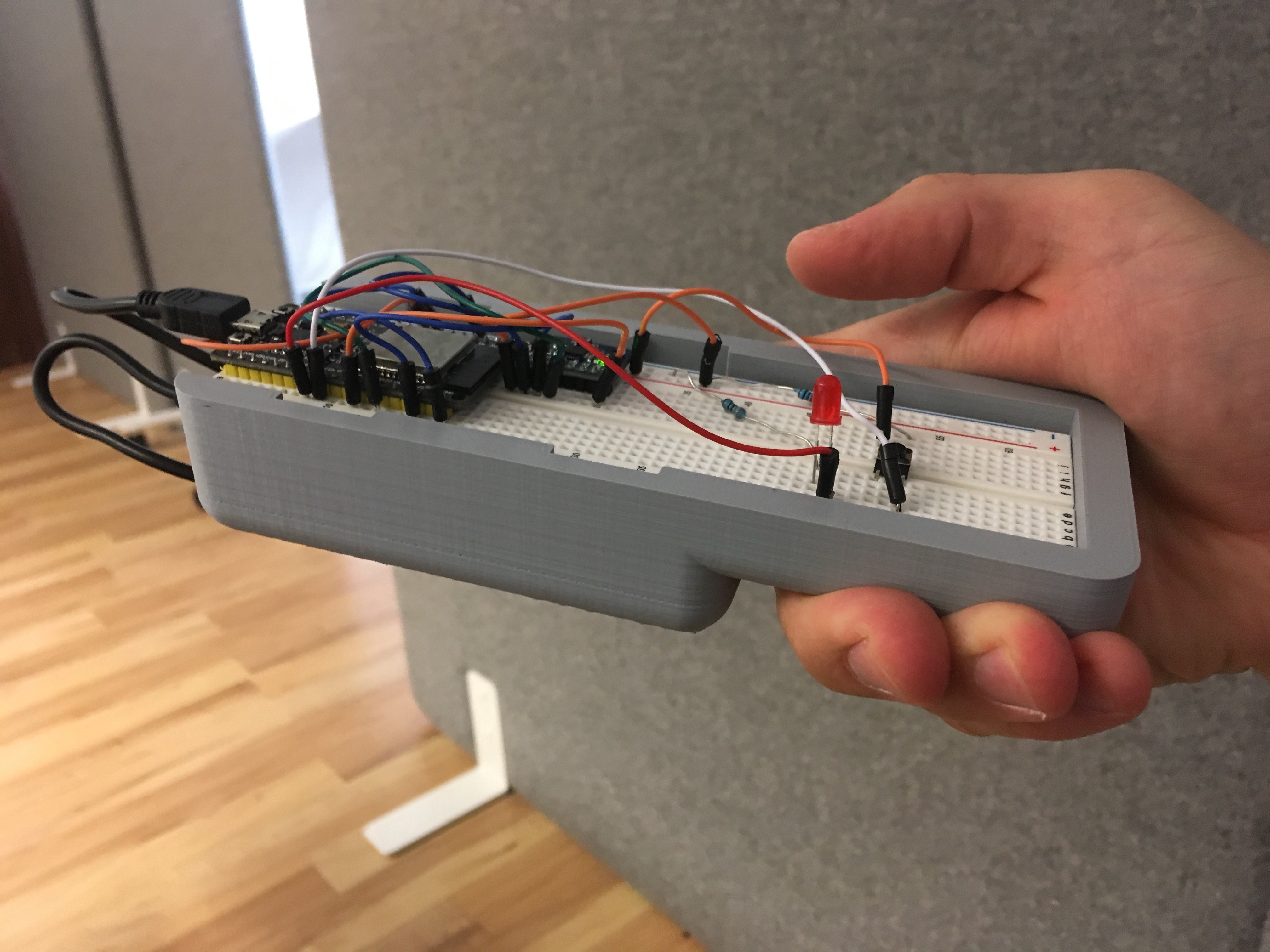
Designed a rudimentary two-part casing for better handling of the remote for 3D printing. STL files of top and bottom part are attached. Breadboard with powerbank is glued to the bottom part, top part can be loosely plugged.
![]()
-
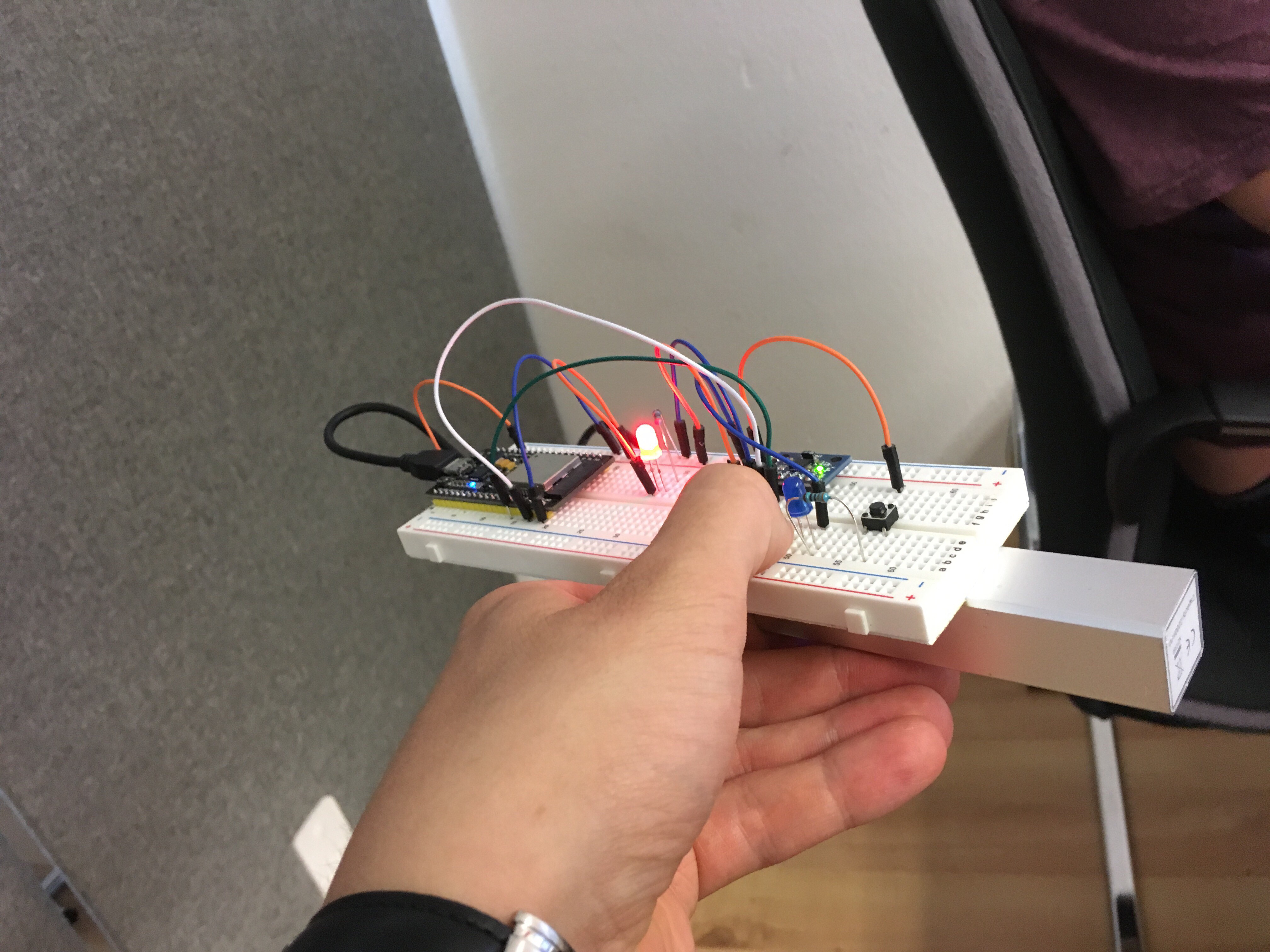
Testing components
10/10/2019 at 16:00 • 0 comments![]()
This is the first setup to test components and functionality. Basically ESP32 and MPU6050 devboards on a breadboard with some LEDs and a button for input/output. ESP hooked up to a small powerbank for easy wireless access.
Motion remote
Prototype of a motion-sensing bluetooth remote for Android apps.