Josh Pieper
Josh Pieper-
Introducing the mjbots quad A1
03/16/2020 at 11:02 • 0 commentsHere's a quick video showing rebuilding the legs on the mjbots quad A1. Everything is upgraded from the A0, including 12 qdd100 servos, a new body, new legs, and a new power distribution board, and a new raspberry pi daughterboard.
and a pic of the final result:
![]()
-
mjbots quad A1 - teaser!
03/05/2020 at 16:38 • 0 commentsJust a quick video teaser:
-
Pre-production mk2 servos
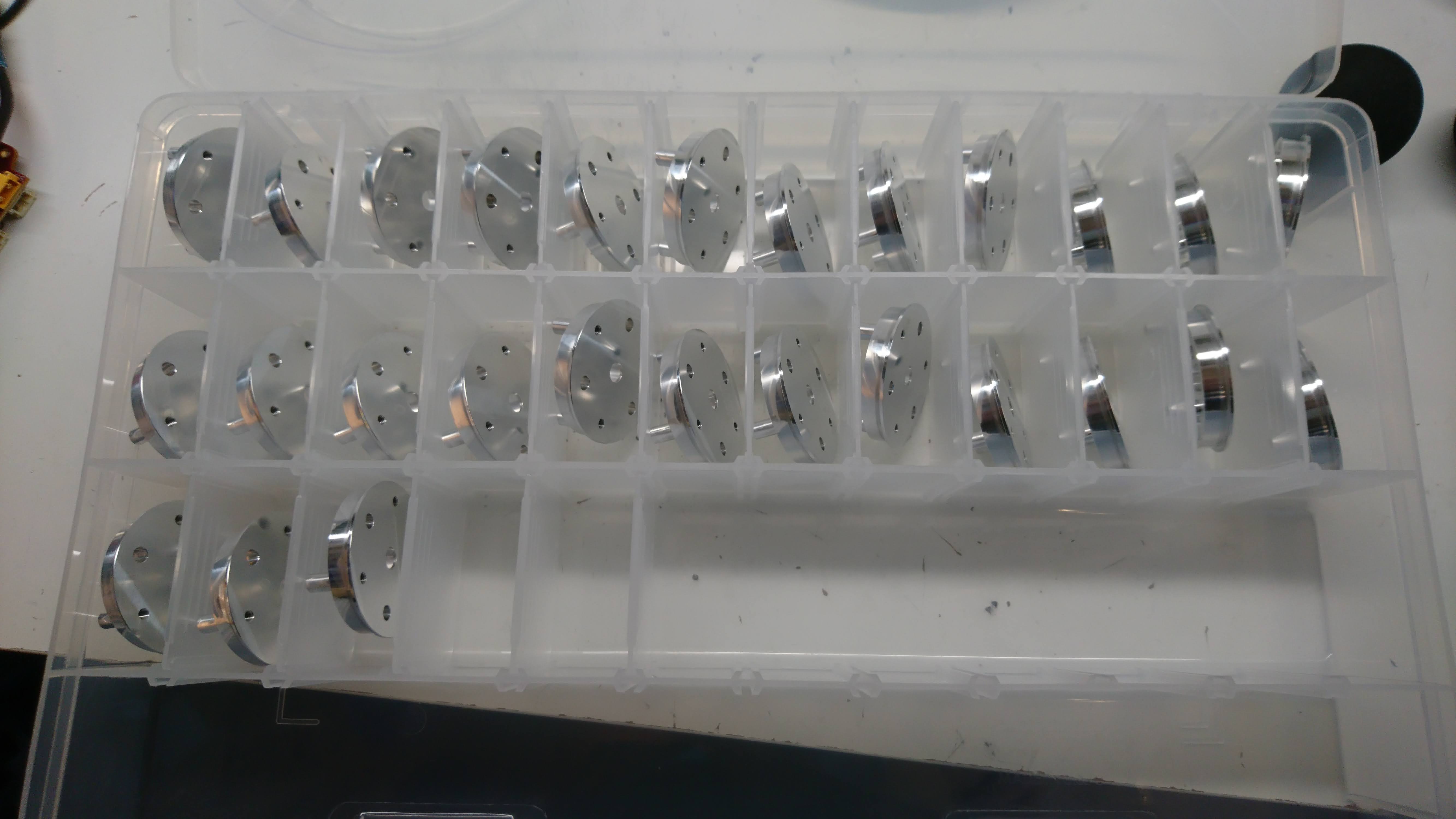
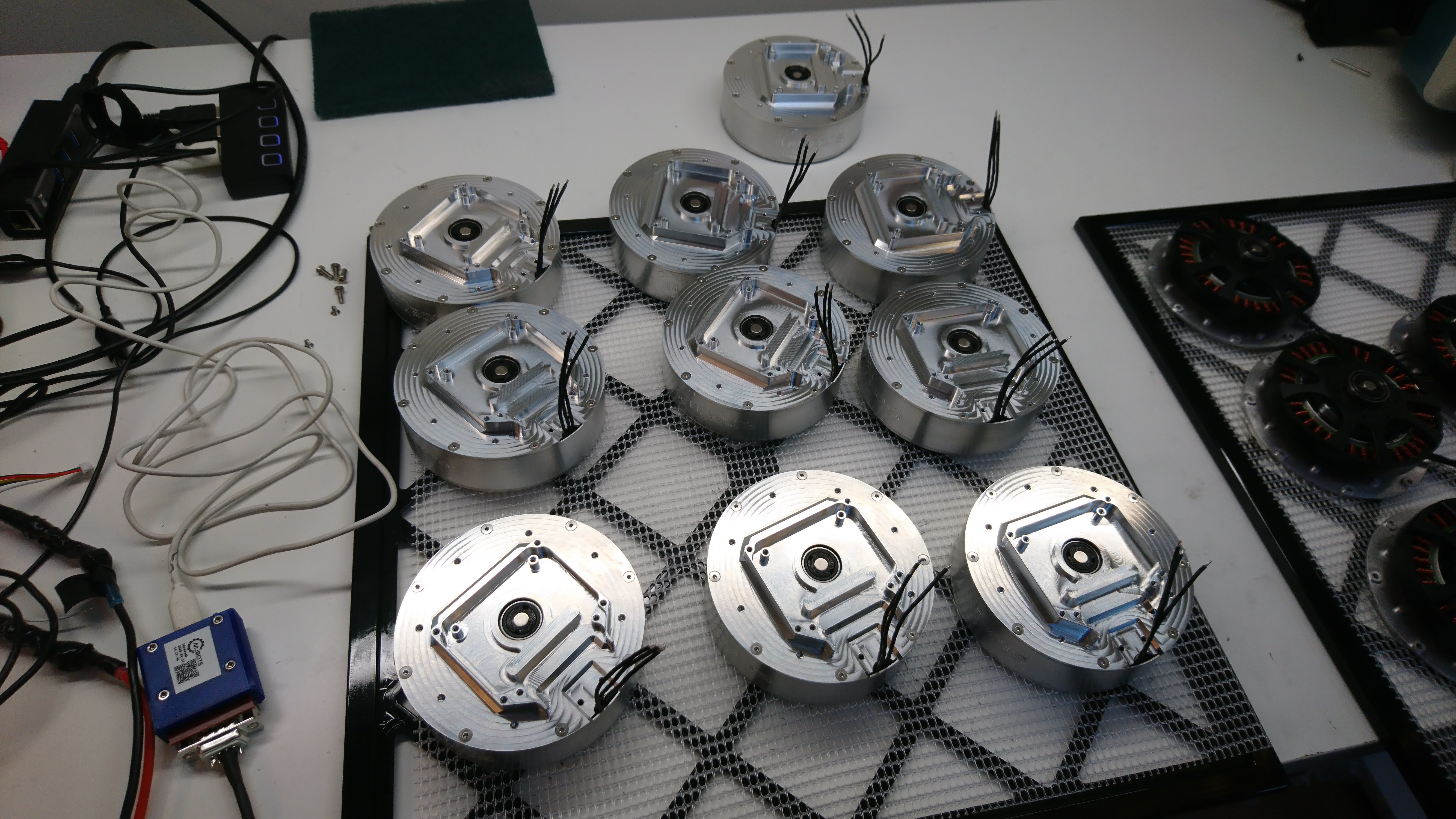
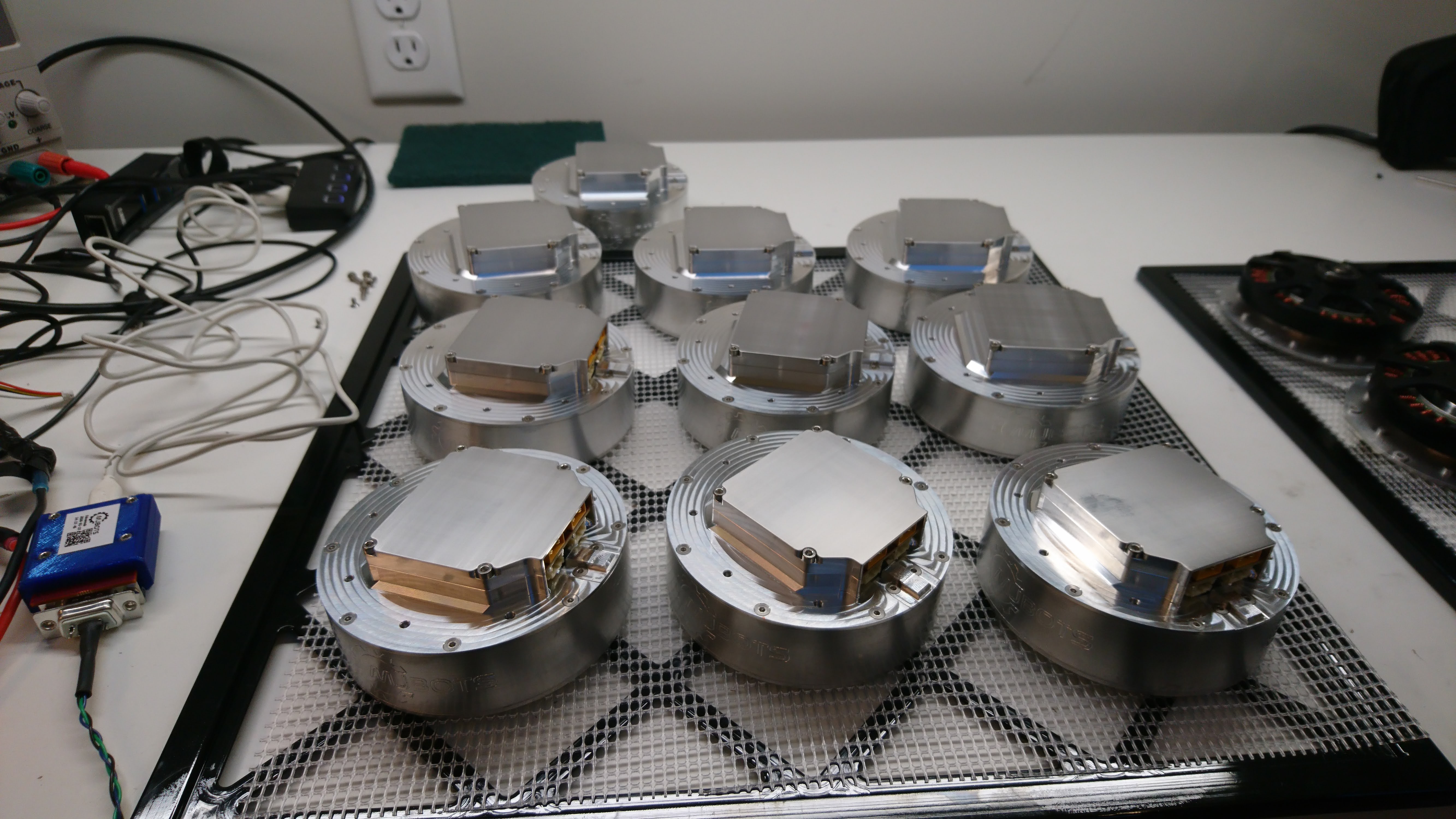
02/26/2020 at 12:42 • 0 commentsI've got a lot of parts in house now, and have built up a fraction of my pre-production mk2 servos! So far all good! Here's some pictures of the parts and build:
![]()
Planet Outputs ![]()
Planet Inputs ![]()
Bearings installed ![]()
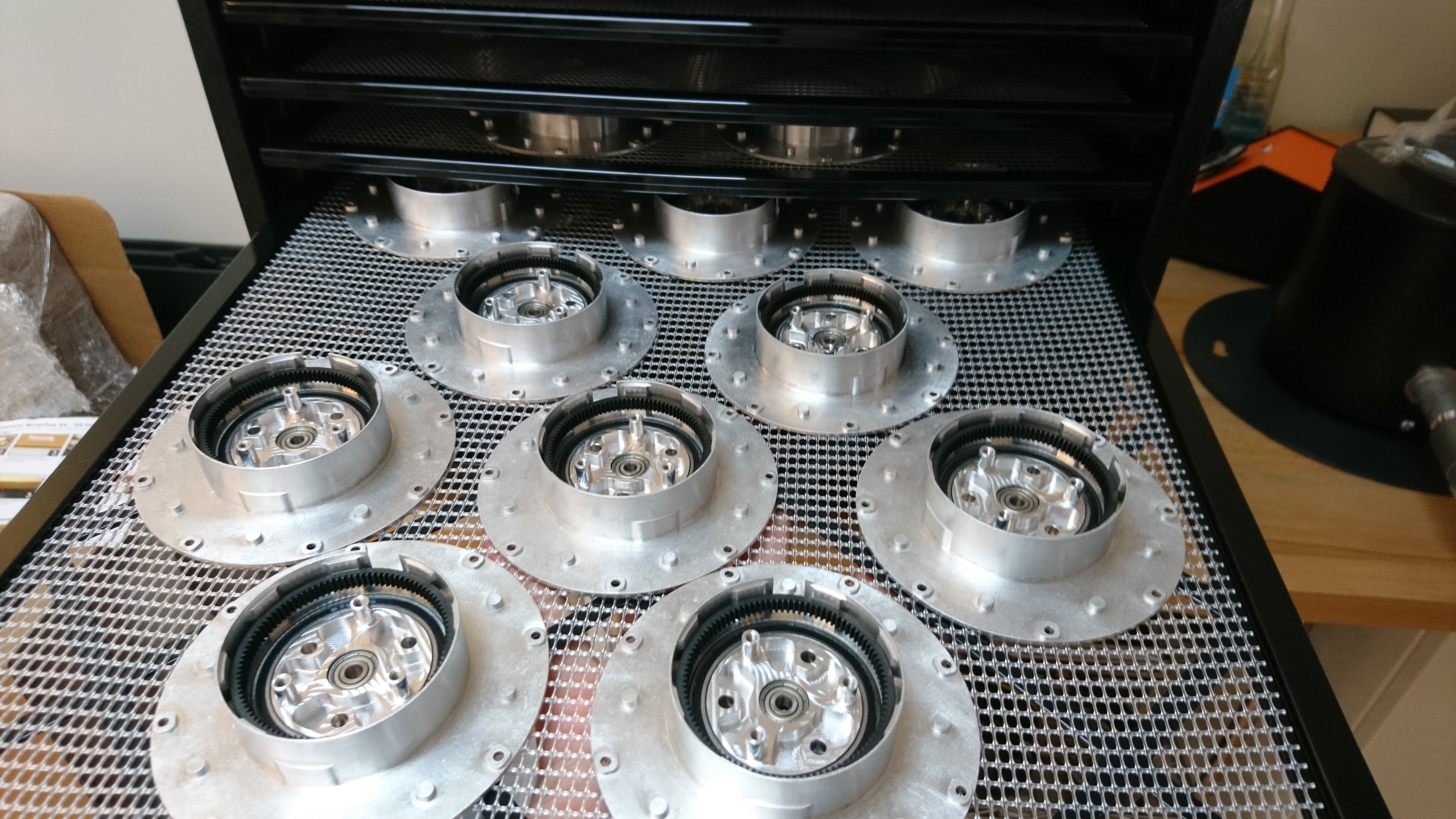
Front housings with internal gear and planet output ![]()
Rotors with sun gear and bearings ![]()
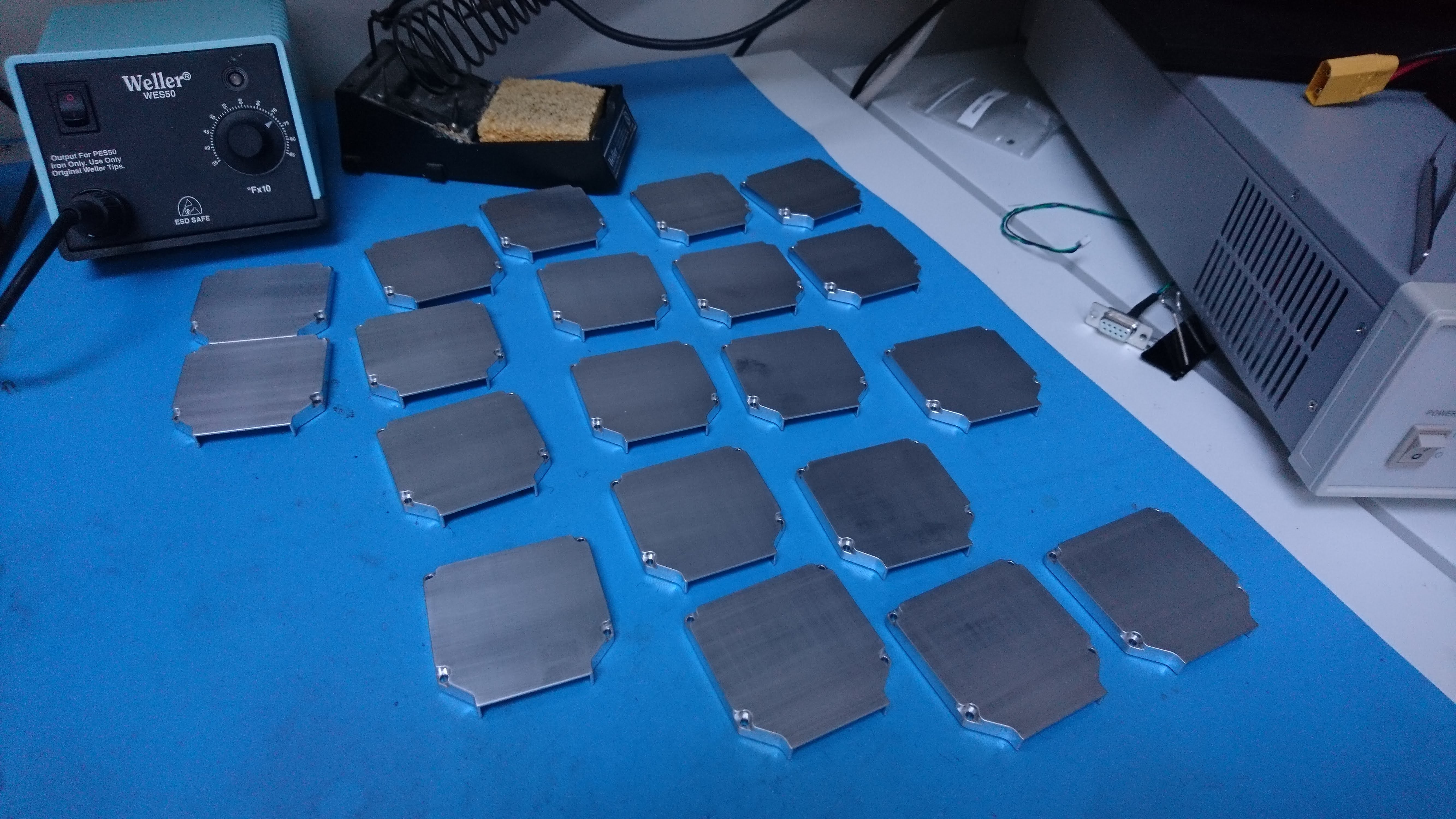
Brushed back covers ![]()
Finish test of outer housing ![]()
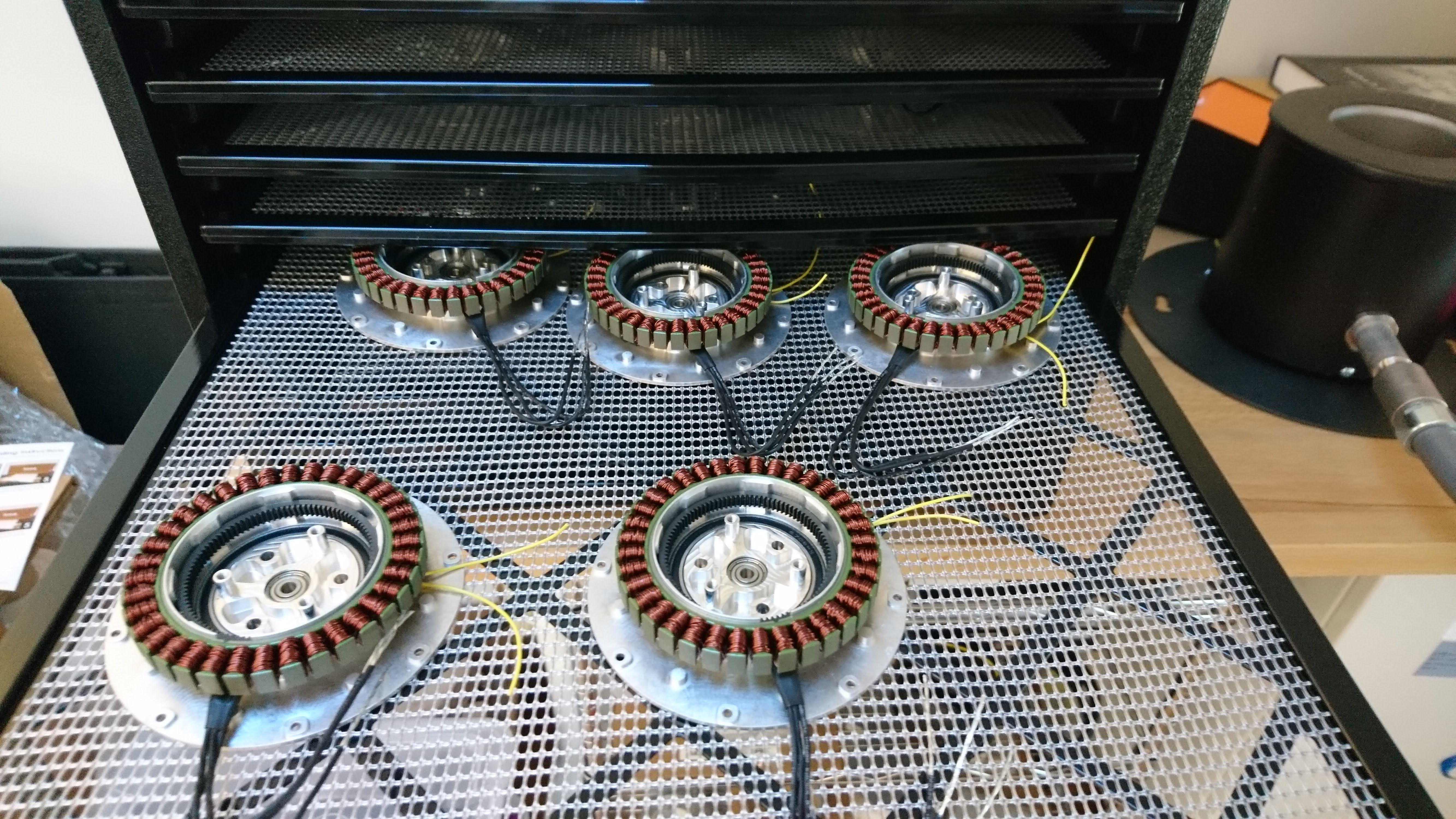
Stators installed ![]()
Planet input assemblies ![]()
Planet inputs installed ![]()
Back covers installed ![]()
Controllers soldered ![]()
All buttoned up! -
moteus r4 controller devkit coming soon
01/15/2020 at 11:47 • 0 commentsUpdate: All the beta slots are full, thanks for your interest!
The r4.x series of the moteus controller is coming along nicely. I now have enough boards in house to build a quadruped and am making some development kits for others to experiment with.
![]()
That's a prototype of the development kit, which also comes with a power supply and all the cables and adapters you need.
![]()
There's a whole bunch of controllers!
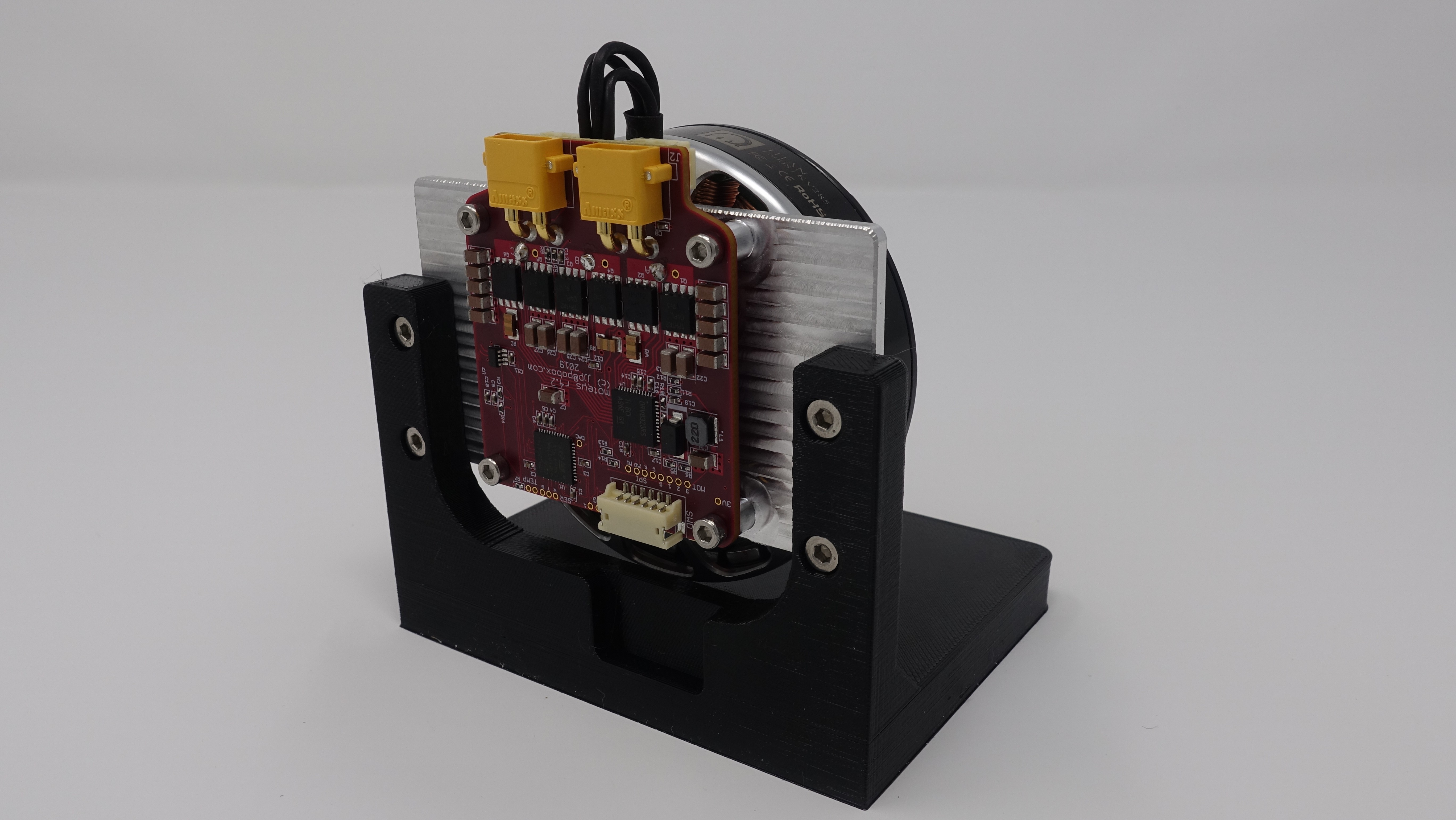
And a quick video showing it spinning on the devkit stand.
If you're interested in purchasing a devkit later this month for $199, you can fill out this google form to get a spot in the beta program: https://forms.gle/aevTe66QnPjB8NPC7
-
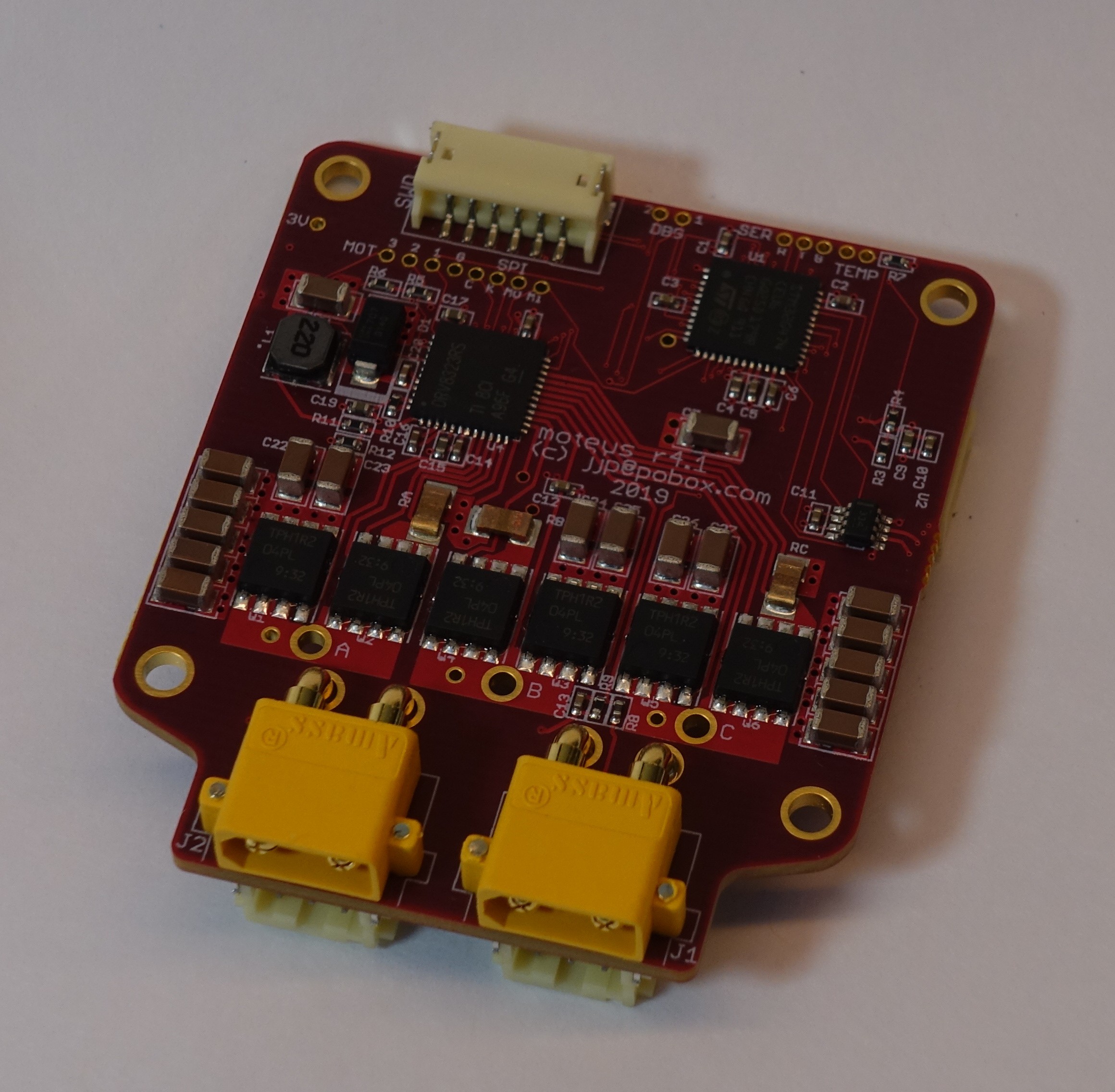
moteus controller r4.x
12/20/2019 at 14:20 • 1 commentI'm making progress bringing up the "production" version of the moteus controller, the r4.x series. This version is designed to be produced in medium volumes, and also resolves some of the annoyances I had in the r3.x series. Features:
- 3 phase brushless FOC based control
- Input: 12-34V
- Connectors: Daisy chainable power (XT30) and data (JST PH3)
- Communication: Up to 8Mbps FD-CAN
- Output: With proper heatsinking, 30A continuous phase current, 100A peak
- Form factor: 45x54mm w/ M2.5 mounting pattern
- Mass: 14.5g
- Integrated AS5047 magnetic encoder
![]()
So far things are looking good. I ran some endurance testing using a juggling ball as a test mass and a prototype mk2 moteus servo.
-
Pronking!
11/07/2019 at 11:38 • 0 commentsAnother short video update:
-
Belly Flop!
11/01/2019 at 10:32 • 1 commentAnother mini-video update:
-
A tiny jump
10/23/2019 at 11:13 • 1 commentA tiny bit more progress, in the form of a video:
-
More graceful failure handling
10/11/2019 at 12:47 • 0 commentsI've done some work on more graceful failure handling, just a video here...
-
September 2019 Update
09/30/2019 at 12:53 • 4 commentsI've made a lot of progress in the last year, but of course still have a lot to do! This update video has a quick tour.
And now for some details, eventually I guess I should split these up into their own separate hackaday.io projects...
Moteus Controller
I'm up to the fourth version (r3.1) of the open source moteus brushless controller, designed explicitly for legged robot applications. It has a similar purpose to the Dizzy Servo https://hackaday.io/project/164175-custom-motor-for-robotics or the Mini-Cheeta controller, http://build-its-inprogress.blogspot.com/search/label/HobbyKing%20Cheetah but was designed to support a higher bitrate communications channel and eventually be produced in moderate volumes.
R3.1 specifications:
- Up to 24V input
- 50A peak phase current
- 400W peak power
- FOC control with integrated AS5047 magnetic encoder
- 3Mbit RS485 connection with two possible protocols, one which is size efficient for real time control, and another which allows introspecting nearly all internal state
- 30kHz primary control frequency w/ 60kHz switching rate
- Capable of 200Hz overall system updates when combined into a single-bus 12 servo system
- Hardware and firmware open source licensed under the Apache 2.0
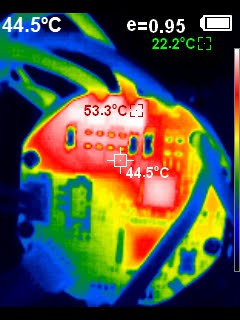
This version has received a fair amount of testing. It is possible to heatsink to the back of the board, and I did some thermal profiling while doing so: http://jpieper.com/2018/12/14/ht-18-thermal-imager-macro-mod/
![]()
I've also run it in a jumping configuration continuously for hours at a time.
Moteus M80 Servo
The moteus controllers are integrated, along with a disassembled brushless 8108 quadcopter motor and a planetary geartrain, into the moteus servo.
R1 specifications:- Peak torque: 40Nm
- Peak speed: 5000 deg/s
- Mass: 410g
- All metal power-train
- Ball bearings used at every rotating interface
- Fixed mounting pattern on both front and rear of servo
- Rotating mounting pattern on front only, 3x M3 threaded holes and 3x M3 shafts
The mounting patterns allows for a variety of useful mounting configurations. Combined with the internal bearings, it can support large cantilevered loads, like those required for a jumping robot.
mjbots robot leg
With a similar design spirit to the Mini-Cheetah, the mjbots robot leg is designed to be largely 3d printed from PETG rather than machined. It provides excellent maneuverability in all three axes.
R1 specifications:
- 15mm width, 6mm pitch belt drive
- Ball bearings supporting knee joint
- Shoulder rotation: +- 180 degrees
- Upper leg rotation: >+- 180 degrees
- Lower leg rotation: +- 160 degrees
- Mass (including servos): ~1.9kg
mjbots quad A0
The robot is a chassis with an integrated computer, battery mount, power distribution, and 4 mjbots robot legs. It runs the open source mjmech software for gait sequencing and control.
R1 specifications:
- Mass: 9.5kg w/o battery
- Computer: Raspberry Pi 3b+
- Top speed: ~0.3m/s