Brian Brocken
Brian Brocken-
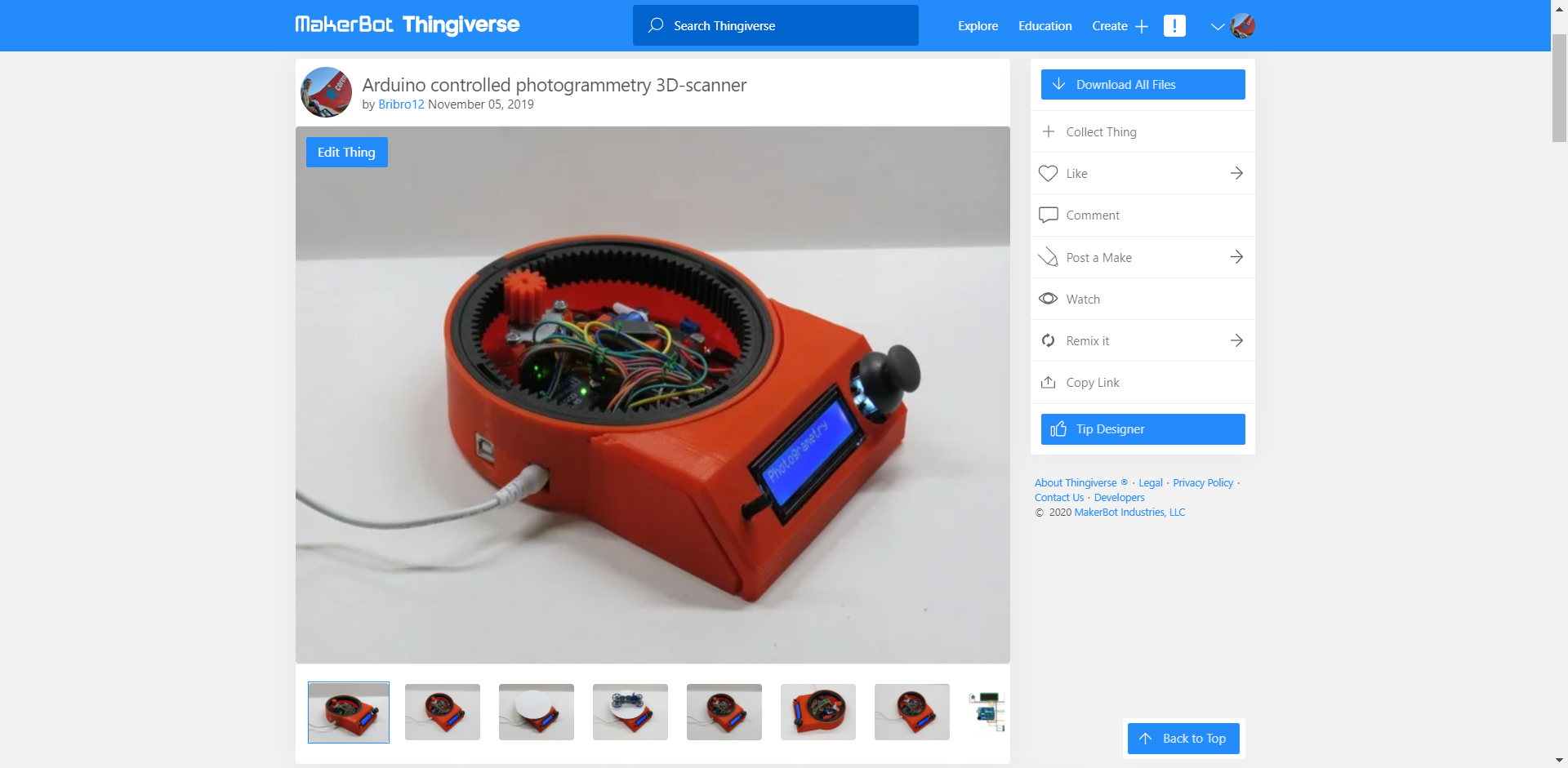
Posted the stl-files also on Thingiverse
10/04/2020 at 22:42 • 0 comments -
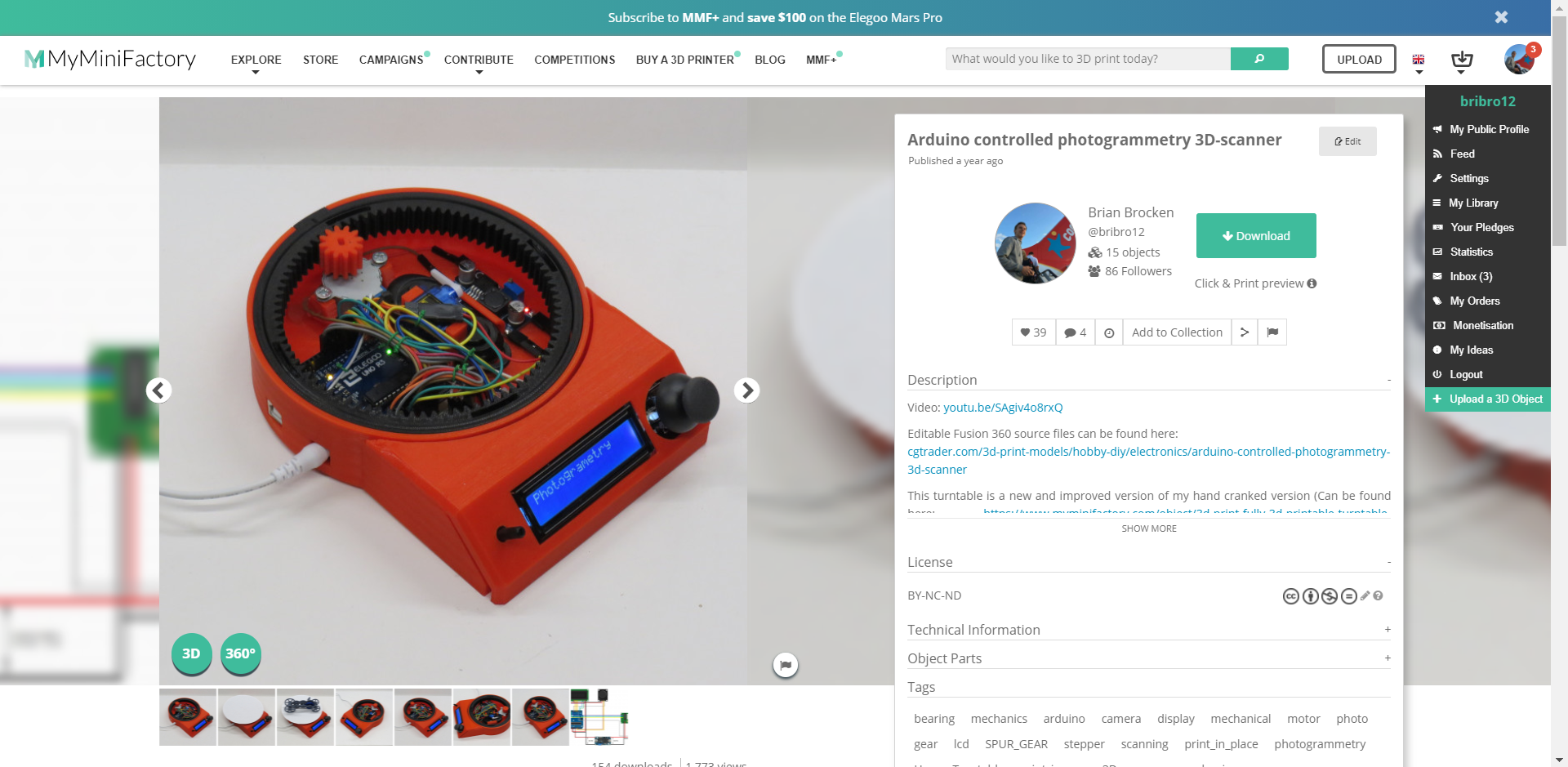
Posted the STL-files on MyMiniFactory
10/04/2020 at 22:40 • 0 comments -
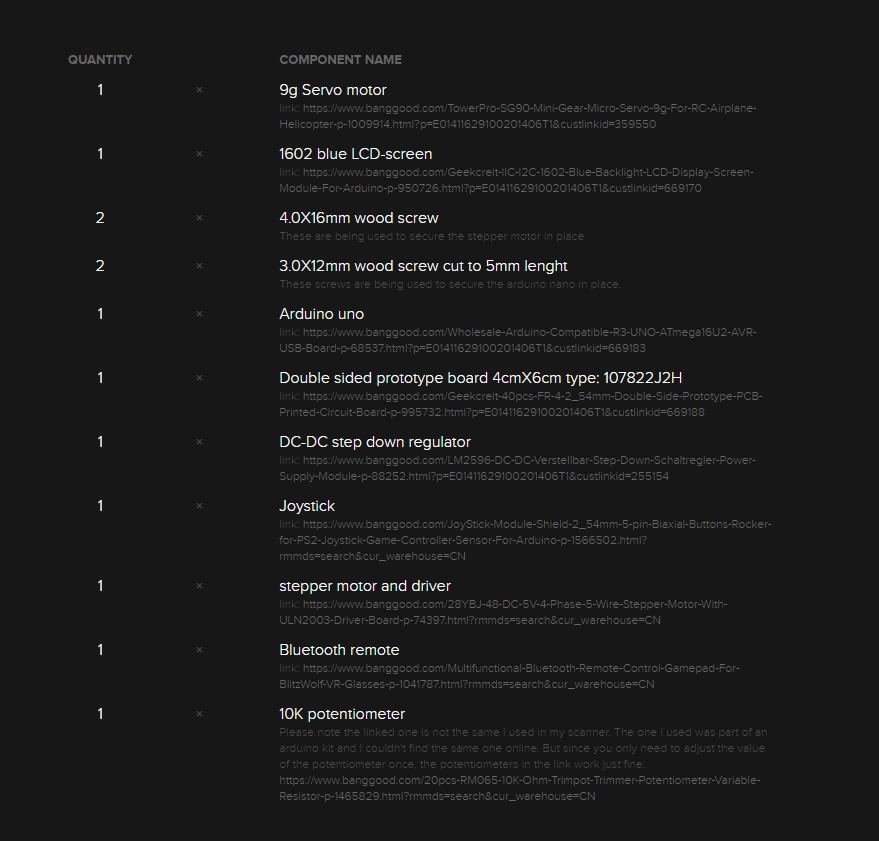
Parts list is now complete
10/04/2020 at 22:34 • 0 commentsThe links in the parts list have been updated and the list is now complete.
-
Posted the Fusion 360 source files on CGtrader
09/20/2020 at 19:41 • 0 commentsI posted the original Fusion 360 source files on CGtrader for the people who want to tweek the design a bit.
![]()
-
Added a code contribution from Ryan Hashiro to the files section
09/20/2020 at 19:37 • 0 commentsAdded a code contribution from Ryan Hashiro to the files section on this page.
Code:
/* Original code By Brian Brocken Contribution By Ryan Hashiro: 1. Added library calls and setups for an LCD with I2C backpack. 2. Added fast value change routines for the number of photogrammetry pics, motor speed, and cinematic turns. Holding joystick deflection for > 1 sec enters fast change mode. Change rate is proportional to amount of deflection. For the motor speed change is fixed at the slow speed since there's only 17 values to go through. 3. Added cancel routines for the photogrammetry and cinematic modes. Holding the joystick button down for > 2 sec kicks you out of the operation modes. */ // #include <LiquidCrystal.h> // use this library for the standard (non I2C) LCD #include <LiquidCrystal_I2C.h> // RH - use this library for LCD displays with I2C backpack #include <Wire.h> // RH - needed for the LCD I2C library. SCL connects to pin A5. SDA connects to pin A4. Jumper the LED backlight pin on the I2C board #include <Stepper.h> #include <Servo.h> // LiquidCrystal lcd(1, 2, 4, 5, 6, 7); // Use these pins for the 1602 lcd LiquidCrystal_I2C lcd(0x27, 16, 2); // RH - use this for I2C LCD. Assumes default address of 0x27 const int SW_pin = 8; // digital pin connected to switch output const int X_pin = A0; // analog pin connected to X output const int Y_pin = A1; // analog pin connected to Y output int MenuNr = 0; // Menu number int PhotoNr = 2; // The amount of photos that have to be taken bool Flag1 = 0; // This flag is only active during 1 program cycle (prevents constantly adding/subtracting 1 to the menu number when the joystick is pushed to the side) bool Flag2 = 0; // This flag is only active during 1 program cycle (prevents constantly adding/subtracting 2 to the photo number when the joystick is pushed up or down) bool Flag3 = 0; // This flag is only active during 1 program cycle (prevents constantly adding/subtracting 1 to the RPM when the joystick is pushed up or down) bool Flag4 = 0; // This flag is only active during 1 program cycle (prevents constantly adding/subtracting 1 to the turn number when the joystick is pushed to the side) bool Flag5 = 0; // This flag is only active during 1 program cycle (prevents constantly adding/subtracting 1 to the RPM when the joystick is pushed up or down) bool Flag6 = 0; // This flag is only active during 1 program cycle to clear the lcd int SwMenu = 0; // Switch menu (Sub menu's in the main menu's) bool BtnFlag = 0; // This flag is only active during 1 program cycle (prevents constantly adding of 1 to SwMenu when button is pressed) // RH - added variables for fast change & cancel modes int FastChng = 0; // indicates fast change value mode. 0 = off, 1 = delay mode, 2 = fast changing mode const unsigned long FastDelay = 1000; // delay mode time (before values change fast) const unsigned long ShortInt = 100; // short fast change interval const unsigned long LongInt = 300; // long fast change interval const unsigned long BtnDelay = 2000; // delay for button press to cancel operations. Note this is an approximate delay, since stepper motor // suspends all program execution until motor finishes its move unsigned long SetTime = 0; // time value for fast change & button cancel modes. Used to calculate time intervals bool BtnCancelFlag = 0; // This flag is used to detect when button is pressed for canceling operations bool MaxSwMenu = 0; // This flag is used for detecting when the maximum SwMenu is reached bool CinCancelFlag = 0; // This flag is used to trigger cinematic cancel. 1 = cancel cinematic operation int StepPoll = 480; // number of motor steps to poll for cinematic cancel (at 15 rpm) int Cntr = 0; // step counter for cinematic motor cancel // RH - end of added variables const int stepsPerRevolution = 2048; // change this to fit the number of steps per revolution int FullRev = 14336; // 1 full revolution of the big gear -> Small-Big gear ratio is 7:1 int rolePerMinute = 15; // Adjustable range of 28BYJ-48 stepper is 0~17 rpm int PhotoTaken = 0; // Amount of photo's that have been taken int StepPerPhoto; // Amount of steps per photo (calculated -> see MenuNr 0/SwMenu 2) int TurnNr = 1; // Amount of turns int CurrentTurn = 0; // Stores current turn number int Steps = 0; // Amount of individual steps the stepper motor has to turn Stepper myStepper(stepsPerRevolution, 9, 11, 10, 12); // Use these pins for the stepper motor Servo Servo1; // Define Servo1 as a servo void setup() { //lcd.begin(16, 2); //Lcd setup for standard (non I2C) LCD connection lcd.init(); // RH - I2C LCD init command lcd.backlight(); // RH - I2C LCD turn backlight on pinMode(SW_pin, INPUT); //Set pushbutton as input digitalWrite(SW_pin, HIGH); //Set SW_pin High myStepper.setSpeed(rolePerMinute); //Set RPM of steppermotor Servo1.attach(3); //Attach servo to pin 3 Servo1.write(90); //Move servo to mid possition lcd.setCursor(4, 0); //Startup screen start lcd.print("Welcome!"); // """"" // lcd.setCursor(1, 1); // """"" // lcd.print("Software: V1.6"); // """"" // delay(3000); // """"" // lcd.clear(); // """"" // lcd.setCursor(0, 0); // """"" // lcd.print("Designed by"); // """"" // lcd.setCursor(0, 1); // """"" // lcd.print("Brian Brocken"); // """"" // delay(2000); // """"" // lcd.clear(); //Startup screen end } void loop() { int XValue = analogRead(X_pin); // Read the analog value from The X-axis from the joystick int YValue = analogRead(Y_pin); // Read the analog value from The Y-axis from the joystick int SwValue = digitalRead(SW_pin); // Read the digital value from The Button from the joystick if (MenuNr < 0){ //This sets the min number of menu's MenuNr = 0; } else if ( MenuNr > 2){ //This sets the max numbers of menu's MenuNr = 2; } if (XValue < 400 && Flag1 == 0 && SwMenu == 0){ //if the joystick is pushed to the right side and flag1 is 0 then 1 will be added to the menu number (purpose of the flag -> see comment Flags above) MenuNr = MenuNr + 1; Flag1 = 1; lcd.clear(); } if (XValue > 600 && Flag1 == 0 && SwMenu == 0){ //if the joystick is pushed to the left side and flag1 is 0 then 1 will be subtracted from the menu number (purpose of the flag -> see comment Flags above) MenuNr = MenuNr - 1; Flag1 = 1; lcd.clear(); } if (XValue > 399 && XValue < 599 && Flag1 == 1){ //if joystick is at neutral possition, flag1 is set to 0 (purpose of the flag -> see comment Flags above) Flag1 = 0; } if (SwValue == 0 && BtnFlag == 0 && MaxSwMenu == 0){ //if the button is pressed and the flag is 0 -> add 1 to menu SwMenu = SwMenu + 1; BtnFlag = 1; BtnCancelFlag = 0; lcd.clear(); } if (SwValue == 1 && BtnFlag == 1){ //if the button is not pressed and the flag is 0 -> Reset the flag (purpose of the flag -> see comment Flags above) BtnFlag = 0; } //***********************************************Menu0***********************************************// if (MenuNr == 0){ //Menu0 program if (SwMenu == 0){ //Menu 0 selected lcd.setCursor(0, 0); lcd.print("Photogrametry"); } if (SwMenu == 1){ //entered menu 0 lcd.setCursor(0, 0); lcd.print("Nr of photo's"); lcd.setCursor(7, 1); lcd.print(PhotoNr); if (FastChng == 0) { // RH - if not in fast change mode, update set time SetTime = millis(); } if (YValue < 400 && Flag2 == 0){ //joystick up -> Add 2 to number of photo's PhotoNr = PhotoNr + 2; Flag2 = 1; FastChng = 1; lcd.clear(); } if (YValue > 600 && Flag2 == 0){ //joystick down -> Subtract 2 from number of photo's PhotoNr = PhotoNr - 2; Flag2 = 1; FastChng = 1; lcd.clear(); } if (YValue > 399 && YValue < 599 && Flag2 == 1){ //if the Y-axis is back at it's neutral possition -> Flag3 = 0 -> Prevents constant adding or subtracting of 2 Flag2 = 0; FastChng = 0; } if (YValue < 400 && FastChng == 1) { // RH - if joystick up is held for > the fast delay time, then enter fast change mode if ((millis() - SetTime) > FastDelay) { FastChng = 2; SetTime = millis(); // update the set time } } if (YValue > 600 && FastChng == 1) { // RH - if joystick down is held for > the fast delay time, then enter fast change mode if ((millis() - SetTime) > FastDelay) { FastChng = 2; SetTime = millis(); // update the set time } } if (YValue < 400 && FastChng == 2) { // RH - we are in fast change mode, so we want to update the values quickly, proportional between if ((millis() - SetTime) > (LongInt - (400 - YValue) * (LongInt - ShortInt) / 400)) { // ShortInt and LongInt based on joystick deflection PhotoNr = PhotoNr + 2; SetTime = millis(); lcd.clear(); } } if (YValue > 600 && FastChng == 2) { // RH - same for joystick down in fast change mode if ((millis() - SetTime) > (LongInt - (YValue - 600) * (LongInt - ShortInt) / 400)) { PhotoNr = PhotoNr - 2; SetTime = millis(); lcd.clear(); } } if (PhotoNr < 2){ //Min allowable Nr of photo's PhotoNr = 2; } if (PhotoNr > 200){ //Max allowable Nr of photo's PhotoNr = 200; } } if (SwMenu == 2){ //Program started MaxSwMenu = 1; lcd.setCursor(0, 0); lcd.print("Program started"); lcd.setCursor(0, 1); lcd.print("Photo Nr: "); lcd.print(PhotoTaken); StepPerPhoto = FullRev / PhotoNr; //Calculate amount of steps per photo if (PhotoTaken < PhotoNr){ myStepper.setSpeed(rolePerMinute); //Set motor speed myStepper.step(StepPerPhoto); //move the calculated amount of steps PhotoTaken = PhotoTaken + 1; //Add 1 to photos taken lcd.setCursor(0, 1); lcd.print("Photo Nr: "); //Taking photo's lcd.print(PhotoTaken); Servo1.write(30); delay(300); Servo1.write(90); delay(1000); } if (PhotoTaken == PhotoNr){ //If the amount of photos taken is equal to the amount of photos that have to be taken -> Program finished lcd.setCursor(0, 0); lcd.print("Program finished"); delay(3000); lcd.clear(); //Rest parameters PhotoTaken = 0; PhotoNr = 2; SwMenu = 0; MaxSwMenu = 0; Steps = 0; } // RH NOTE - cancelling works but delay is longer than expected since stepper motor movement is blocking if (SwValue == 0 && BtnCancelFlag == 0) { // if button is pressed, start timing for cancel BtnCancelFlag = 1; SetTime = millis(); } if (SwValue == 1 && BtnCancelFlag == 1) { // RH - if button released before BtnDelay, then reset flag BtnCancelFlag = 0; } if (SwValue == 0 && BtnCancelFlag == 1 && ((millis() - SetTime) > BtnDelay)) { // RH - button has been held for > BtnDelay, so cancel operation lcd.clear(); lcd.setCursor(0, 0); lcd.print("Program cancel"); delay(3000); lcd.clear(); PhotoTaken = 0; PhotoNr = 2; SwMenu = 0; MaxSwMenu = 0; Steps = 0; BtnCancelFlag = 0; } } } //***********************************************Menu1***********************************************// if (MenuNr == 1){ //Menu1 program if (SwMenu == 0){ //Menu1 selected lcd.setCursor(0, 0); lcd.print("Cinematic"); CinCancelFlag = 0; Cntr = 0; } if (SwMenu == 1){ //Entered menu1 - sub menu1 lcd.setCursor(0, 0); lcd.print("motor speed"); lcd.setCursor(7, 1); lcd.print(rolePerMinute); if (FastChng == 0) { // RH - if not in fast change mode, update set time SetTime = millis(); } if (YValue < 400 && Flag3 == 0){ // joystick up -> Add 1 RPM rolePerMinute = rolePerMinute + 1; Flag3 = 1; FastChng = 1; lcd.clear(); } if (YValue > 600 && Flag3 == 0){ // joystick down -> Subtract 1 RPM rolePerMinute = rolePerMinute - 1; Flag3 = 1; FastChng = 1; lcd.clear(); } if (YValue > 399 && YValue < 599 && Flag3 == 1){ //if the Y-axis is back at it's neutral possition -> Flag3 = 0 -> Prevents constant adding or subtracting of 1 Flag3 = 0; FastChng = 0; } if (YValue < 400 && FastChng == 1) { // RH - if joystick up is held for > the fast delay time, then enter fast change mode if ((millis() - SetTime) > FastDelay) { FastChng = 2; SetTime = millis(); // update the set time } } if (YValue > 600 && FastChng == 1) { // RH - if joystick down is held for > the fast delay time, then enter fast change mode if ((millis() - SetTime) > FastDelay) { FastChng = 2; SetTime = millis(); // update the set time } } if (YValue < 400 && FastChng == 2) { // RH - we are in fast change mode, so we want to update the values at the LongInt interval if ((millis() - SetTime) > LongInt) { // (using fixed LongInt since not that many values to cycle through) rolePerMinute = rolePerMinute + 1; SetTime = millis(); lcd.clear(); } } if (YValue > 600 && FastChng == 2) { // RH - same for joystick down in fast change mode if ((millis() - SetTime) > LongInt) { rolePerMinute = rolePerMinute - 1; SetTime = millis(); lcd.clear(); } } if (rolePerMinute < 1){ //Min allowable RPM rolePerMinute = 1; } if (rolePerMinute > 17){ //Max allowable RPM rolePerMinute = 17; } } if (SwMenu == 2){ //Entered menu1 - sub menu2 lcd.setCursor(0, 0); lcd.print("Nr of turns"); lcd.setCursor(7, 1); lcd.print(TurnNr); if (FastChng == 0) { // RH - if not in fast change mode, update set time SetTime = millis(); } if (YValue < 400 && Flag4 == 0){ // joystick up -> Add 1 turn TurnNr = TurnNr + 1; Flag4 = 1; FastChng = 1; lcd.clear(); } if (YValue > 600 && Flag4 == 0){ // joystick down -> Subtract 1 turn TurnNr = TurnNr - 1; Flag4 = 1; FastChng = 1; lcd.clear(); } if (YValue > 399 && YValue < 599 && Flag4 == 1){ //if the Y-axis is back at it's neutral possition -> Flag3 = 0 -> Prevents constant adding or subtracting of 1 Flag4 = 0; FastChng = 0; } if (YValue < 400 && FastChng == 1) { // RH - if joystick up is held for > the fast delay time, then enter fast change mode if ((millis() - SetTime) > FastDelay) { FastChng = 2; SetTime = millis(); // update the set time } } if (YValue > 600 && FastChng == 1) { // RH - if joystick down is held for > the fast delay time, then enter fast change mode if ((millis() - SetTime) > FastDelay) { FastChng = 2; SetTime = millis(); // update the set time } } if (YValue < 400 && FastChng == 2) { // RH - we are in fast change mode, so we want to update the values quickly, proportional between if ((millis() - SetTime) > (LongInt - (400 - YValue) * (LongInt - ShortInt) / 400)) { // ShortInt and LongInt based on joystick deflection TurnNr = TurnNr + 1; SetTime = millis(); lcd.clear(); } } if (YValue > 600 && FastChng == 2) { // RH - same for joystick down in fast change mode if ((millis() - SetTime) > (LongInt - (YValue - 600) * (LongInt - ShortInt) / 400)) { TurnNr = TurnNr - 1; SetTime = millis(); lcd.clear(); } } if (TurnNr < 1){ //Min allowable amount of turns TurnNr = 1; } if (TurnNr > 200){ //Max allowable amount of turns TurnNr = 200; } } if (SwMenu == 3){ //Program started MaxSwMenu = 1; StepPoll = 32 * rolePerMinute; // RH - set polling rate StepPoll = number of steps per second (roughly) lcd.setCursor(0, 0); lcd.print("Program started"); lcd.setCursor(0, 1); lcd.print("Turns done: "); lcd.print(CurrentTurn); if (CurrentTurn < TurnNr){ myStepper.setSpeed(rolePerMinute); Cntr = 0; // RH - initialize step counter while ((Cntr <= FullRev) && (CinCancelFlag == 0)) { myStepper.step(StepPoll); // RH - breaking up plate rotation into roughly 1 sec intervals to check for cancel Cntr = Cntr + StepPoll; SwValue = digitalRead(SW_pin); if (SwValue == 0 && BtnCancelFlag == 0) { // RH - check if button is pressed, if so start timing for cancel BtnCancelFlag = 1; SetTime = millis(); } if (SwValue == 1 && BtnCancelFlag == 1) { // RH - if button released before BtnDelay, then reset button flag BtnCancelFlag = 0; } if (SwValue == 0 && BtnCancelFlag == 1 && ((millis() - SetTime) > BtnDelay)) { // RH - button has been held for > BtnDelay, so cancel operation CinCancelFlag = 1; CurrentTurn = TurnNr; } } if (CinCancelFlag == 0) { // RH - operation not cancelled, so continue myStepper.step(FullRev + StepPoll - Cntr); // RH - need to move remainder of steps for 1 full turn due to kickout from while loop CurrentTurn = CurrentTurn + 1; lcd.setCursor(0, 1); lcd.print("Turns done: "); lcd.print(CurrentTurn); } } if (CurrentTurn == TurnNr){ //If the current turn is equal to the amount of thurns that need to be turned -> program finished (RH - or cancelled) lcd.setCursor(0, 0); if (CinCancelFlag == 0) { lcd.print("Program finished"); } else { lcd.clear(); lcd.print("Program cancel"); } delay(3000); lcd.clear(); //Reset CurrentTurn = 0; PhotoNr = 1; rolePerMinute = 15; SwMenu = 0; MaxSwMenu = 0; CinCancelFlag = 0; Steps = 0; } } } //***********************************************Menu2***********************************************// if (MenuNr == 2){ //Menu2 selected if (SwMenu == 0){ lcd.setCursor(0, 0); lcd.print("Manual control"); } if (SwMenu == 1){ //Entered menu2 lcd.setCursor(0, 0); lcd.print("motor speed"); lcd.setCursor(7, 1); lcd.print(rolePerMinute); if (FastChng == 0) { // RH - if not in fast change mode, update set time SetTime = millis(); } if (YValue < 400 && Flag5 == 0){ // joystick up -> Add 1 RPM rolePerMinute = rolePerMinute + 1; Flag5 = 1; FastChng = 1; lcd.clear(); } if (YValue > 600 && Flag5 == 0){ // joystick down -> Subtract 1 RPM rolePerMinute = rolePerMinute - 1; Flag5 = 1; FastChng = 1; lcd.clear(); } if (YValue > 399 && YValue < 599 && Flag5 == 1){ //if the Y-axis is back at it's neutral possition -> Flag3 = 0 -> Prevents constant adding or subtracting of 1 Flag5 = 0; FastChng = 0; } if (YValue < 400 && FastChng == 1) { // RH - if joystick up is held for > the fast delay time, then enter fast change mode if ((millis() - SetTime) > FastDelay) { FastChng = 2; SetTime = millis(); // update the set time } } if (YValue > 600 && FastChng == 1) { // RH - if joystick down is held for > the fast delay time, then enter fast change mode if ((millis() - SetTime) > FastDelay) { FastChng = 2; SetTime = millis(); // update the set time } } if (YValue < 400 && FastChng == 2) { // RH - we are in fast change mode, so we want to update the values at the LongInt interval if ((millis() - SetTime) > LongInt) { // (using fixed LongInt since not that many values to cycle through) rolePerMinute = rolePerMinute + 1; SetTime = millis(); lcd.clear(); } } if (YValue > 600 && FastChng == 2) { // RH - same for joystick down in fast change mode if ((millis() - SetTime) > LongInt) { rolePerMinute = rolePerMinute - 1; SetTime = millis(); lcd.clear(); } } if (rolePerMinute < 1){ //Min allowable RPM rolePerMinute = 1; } if (rolePerMinute > 17){ //Max allowable RPM rolePerMinute = 17; } if (XValue < 400 ){ //if the joystick is pushed to the right side and the neutral flag is 0 then 1 will be added to the menu number (purpose of the flag -> see comment Flag1 above) Steps = Steps + 1; myStepper.setSpeed(rolePerMinute); myStepper.step(Steps); lcd.setCursor(14, 1); lcd.print("->"); Flag6 = 1; } if (XValue > 600 ){ //if the joystick is pushed to the left side and the neutral flag is 0 then 1 will be subtracted from the menu number (purpose of the flag -> see comment Flag1 above) Steps = Steps + 1; myStepper.setSpeed(rolePerMinute); myStepper.step(-Steps); lcd.setCursor(0, 1); lcd.print("<-"); Flag6 = 1; } if (XValue > 399 && XValue < 599){ //if the Y-axis is back at it's neutral possition -> Flag3 = 0 -> Prevents constant adding or subtracting of 1 Steps = 0; if (Flag6 == 1){ lcd.clear(); Flag6 = 0; //This flag is only active during 1 program cycle to clear the lcd } } } if (SwMenu == 2){ //Leave menu 2 when button is pressed lcd.clear(); CurrentTurn = 0; PhotoNr = 1; rolePerMinute = 15; SwMenu = 0; Steps = 0; } } } -
Added a youtube video to the details section of this page
09/20/2020 at 19:34 • 0 comments -
Voltage Distributor
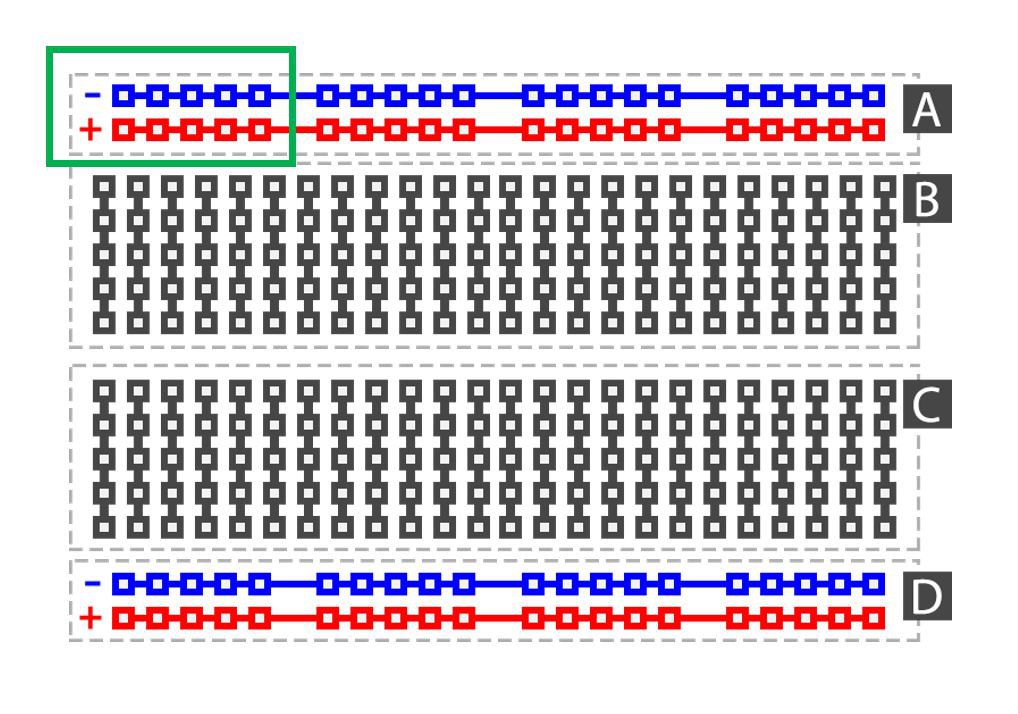
04/23/2020 at 09:44 • 0 commentsAt around 3:15 in the video (https://youtu.be/SAgiv4o8rxQ) you can see I'm installing a little part next to the Arduino Uno. This is a homemade voltage distributor. It's sole purpose is to distribute 5V and 0V to other components. I made it using some double sided prototype board and soldering some 2.54mm female header pins on it. All the 5V pins are soldered together and all the 0V pins are soldered together, just like the + and - strips on a breadbord (see green box on picture below). Hope this cleared it out for some people.
Double sided prototype boards: https://www.banggood.com/Geekcreit-40pcs-FR-4-2_54mm-Double-Side-Prototype-PCB-Printed-Circuit-Board-p-995732.html?p=E01411629100201406T1&custlinkid=669188
2.54mm female header pins: https://www.banggood.com/10pcs-40Pin-2_54mm-Female-Header-Connector-Socket-For-DIY-Arduino-p-945516.html?rmmds=search&cur_warehouse=CN![]()
-
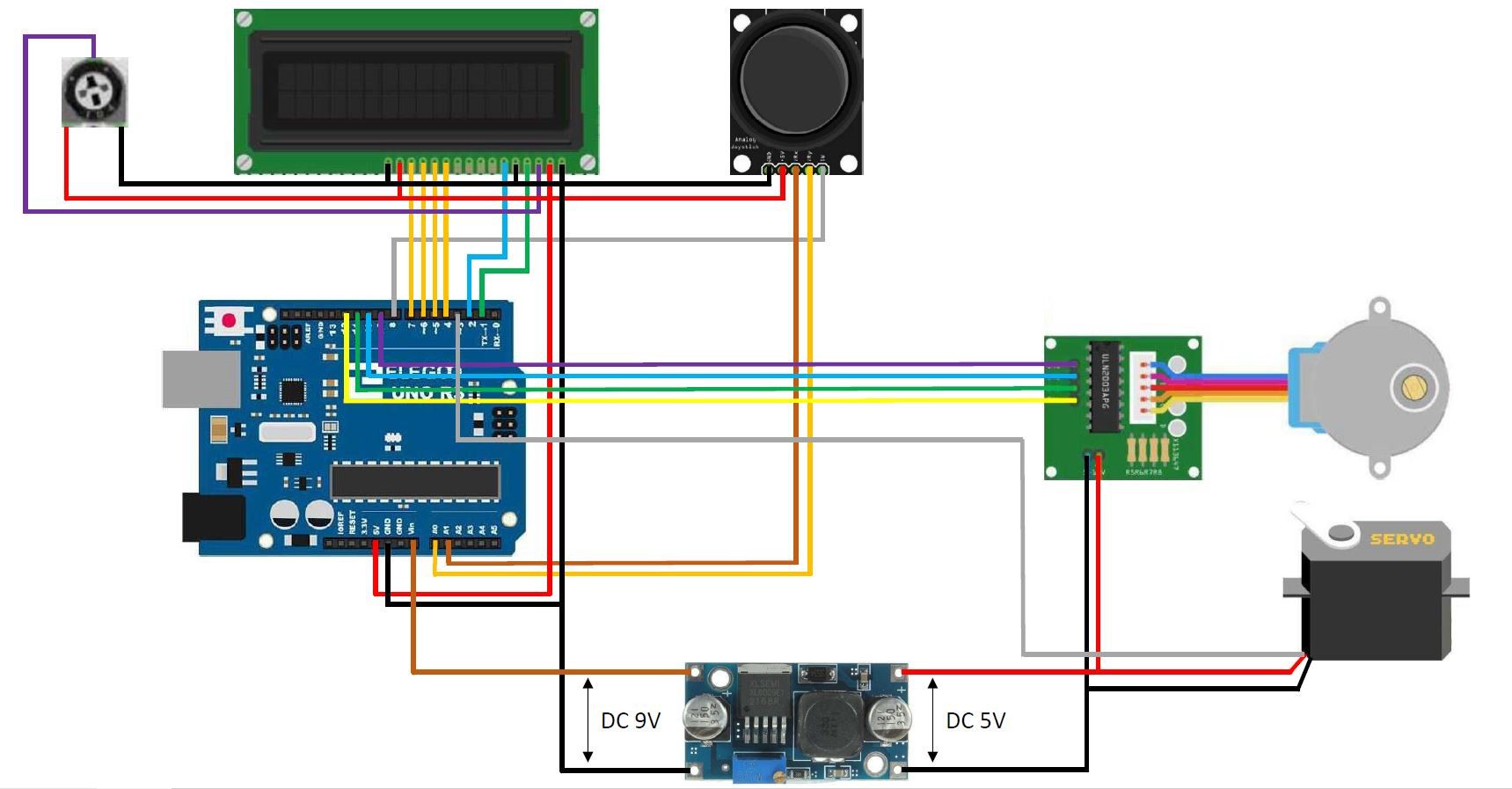
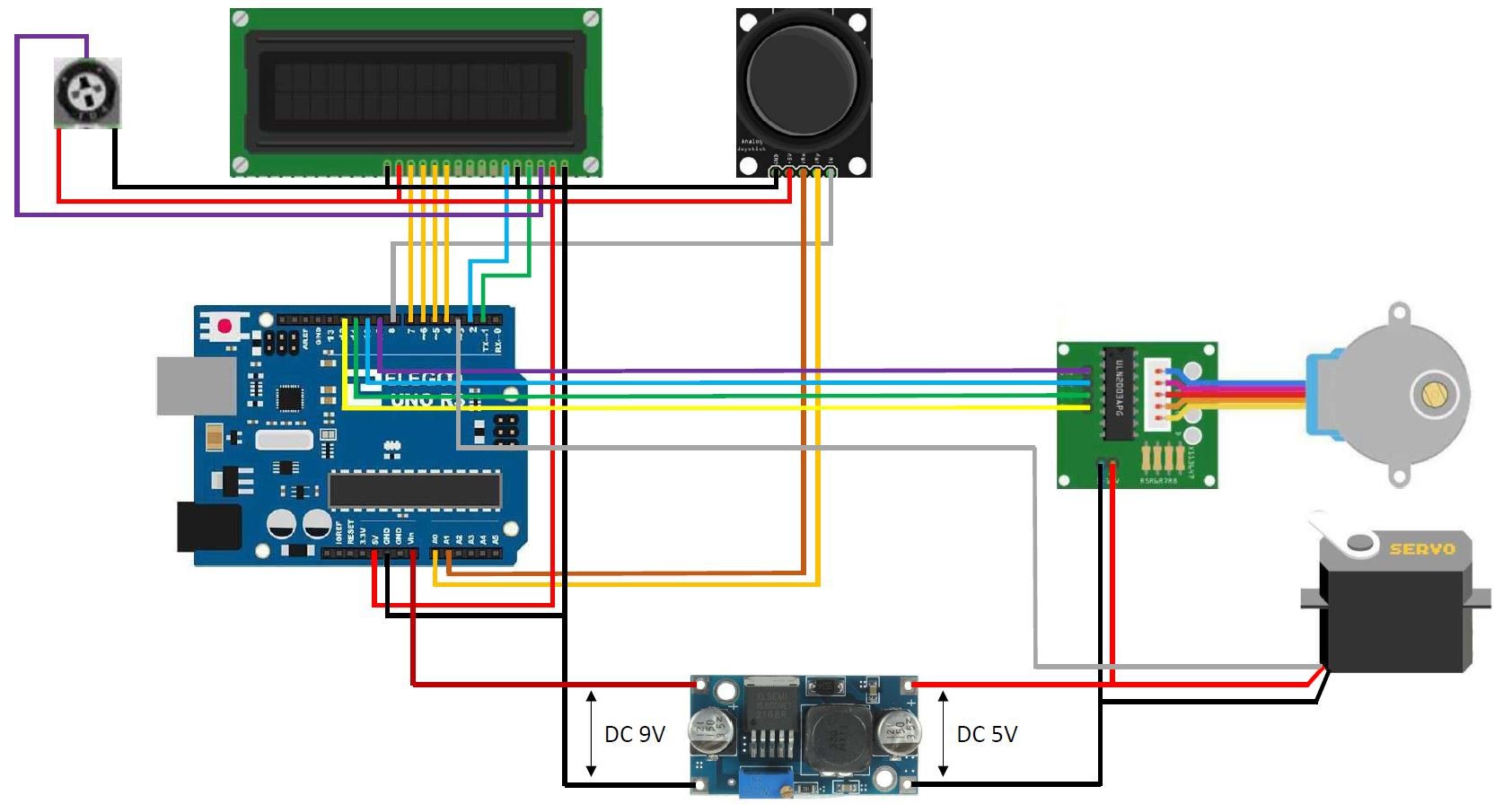
Updated wiring diagram
11/24/2019 at 20:17 • 0 commentsMade a very small adjustment in the wiring diagram to avoid possible confusion with the 5V and Vin pin. I changed the color of the Vin wire to orange, the 5V and Vin wire should not be connected together. The 5V wire goes up to the LCD, joystick and potentiometer. The Vin wire goes to the DC-DC step down voltage regulator.
![]()
-
Arduino code added to the files section
11/06/2019 at 11:54 • 0 comments![]()
-
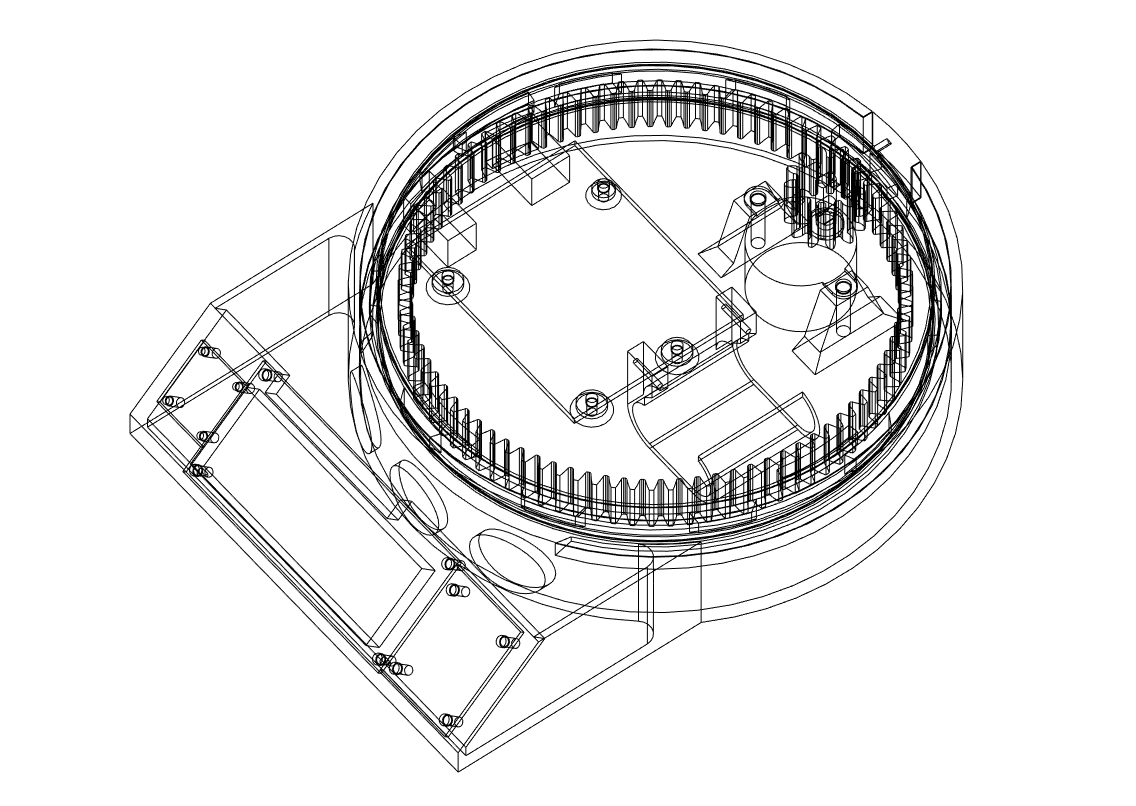
Added a wiring diagram to the files section
11/05/2019 at 21:05 • 0 comments![]()
Arduino controlled photogrammetry 3D-scanner
A completely automated way to take photo's and convert them into a 3D-object