0%
0%
DRVR
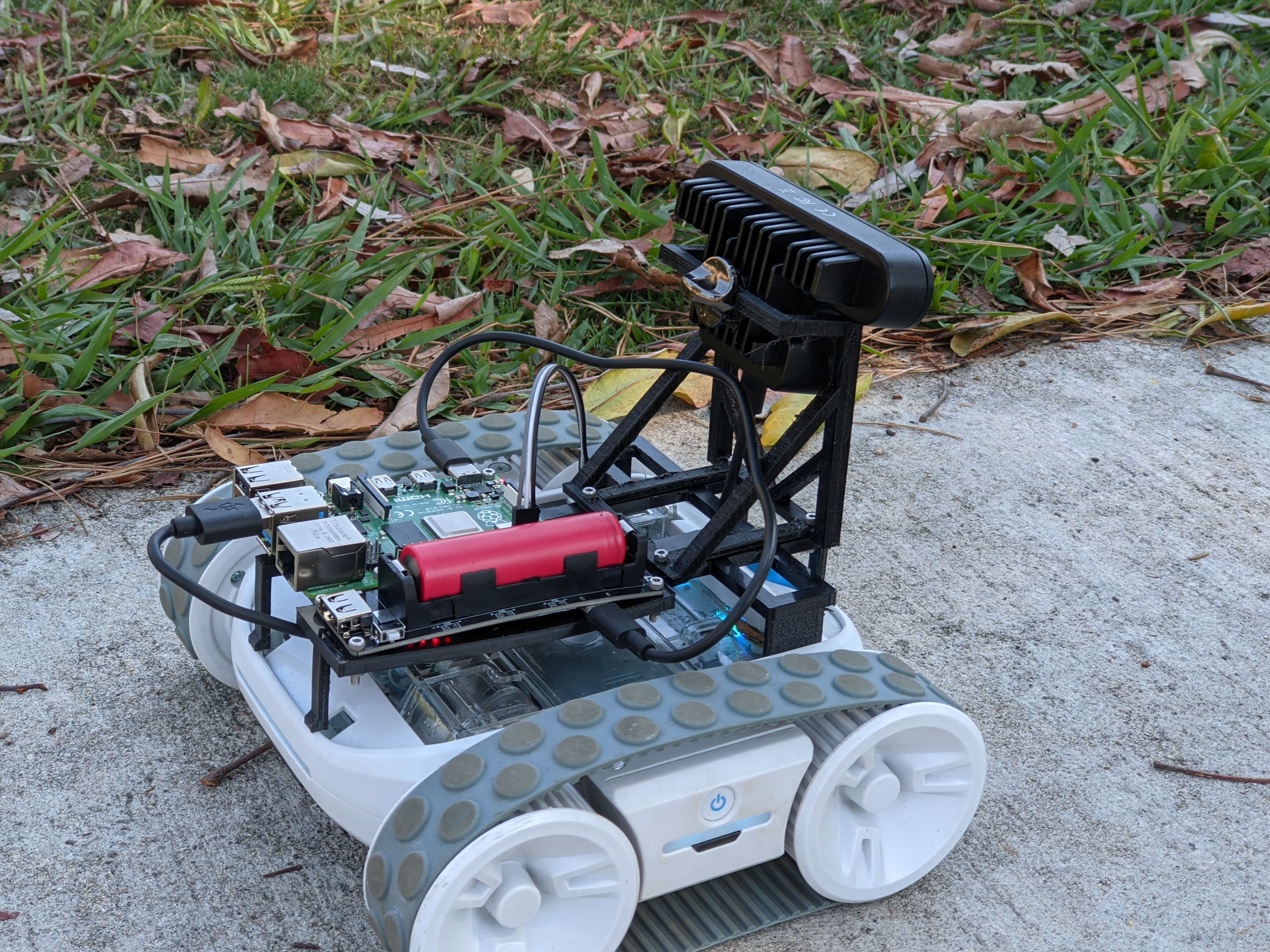
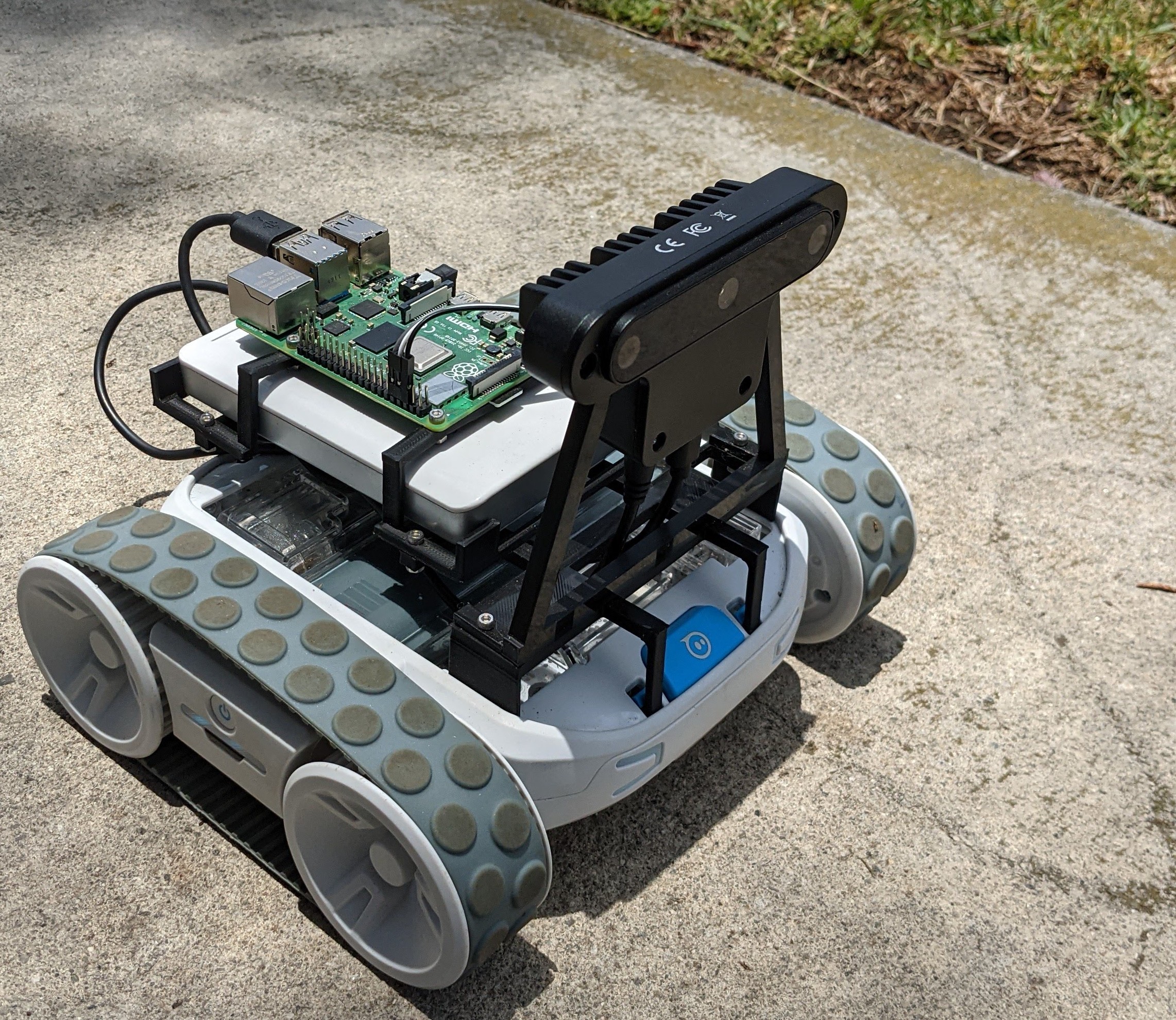
An autonomous robot based on the RVR platform
 Daryll
DaryllBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 This is a big update to the code base with a many improvements. The big news is that it is running really well. It's fast, mostly correct, and has a much nicer interface. It's now down to 1.6s/step so it can make it around the park in less than 10 minutes with a bit more than 3 minutes spent running the motors to move. You can also do a full data collection run with all the photos in less than 30 minutes.
This is a big update to the code base with a many improvements. The big news is that it is running really well. It's fast, mostly correct, and has a much nicer interface. It's now down to 1.6s/step so it can make it around the park in less than 10 minutes with a bit more than 3 minutes spent running the motors to move. You can also do a full data collection run with all the photos in less than 30 minutes. Yesterday my autonomous robot successfully drove itself (*) around the park. 90 minutes to do a loop. There's more information on what I've done and my plans below.
Yesterday my autonomous robot successfully drove itself (*) around the park. 90 minutes to do a loop. There's more information on what I've done and my plans below.
 rlsutton1
rlsutton1
 Jon Hylands
Jon Hylands
 Jacob David C Cunningham
Jacob David C Cunningham
 Piotr Sokólski
Piotr Sokólski