0%
0%
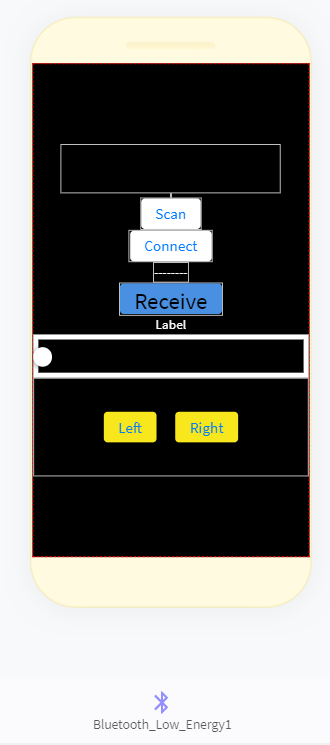
Two wheeled speedster
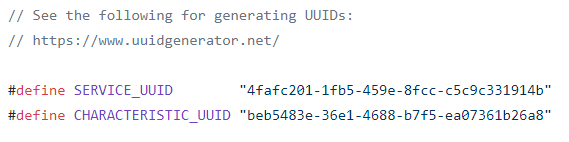
Drum motors from laser printers give this bot tremendous speed at a bargain. Scavenged parts robot with the BLE connection as a bonus!
 shane.snipe
shane.snipeBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Danny FR
Danny FR
 Andy Geppert
Andy Geppert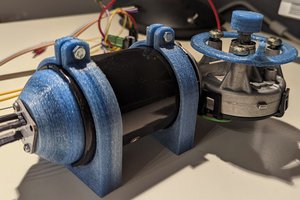
 JP Gleyzes
JP Gleyzes
 Matthias Hasenfus
Matthias Hasenfus