-
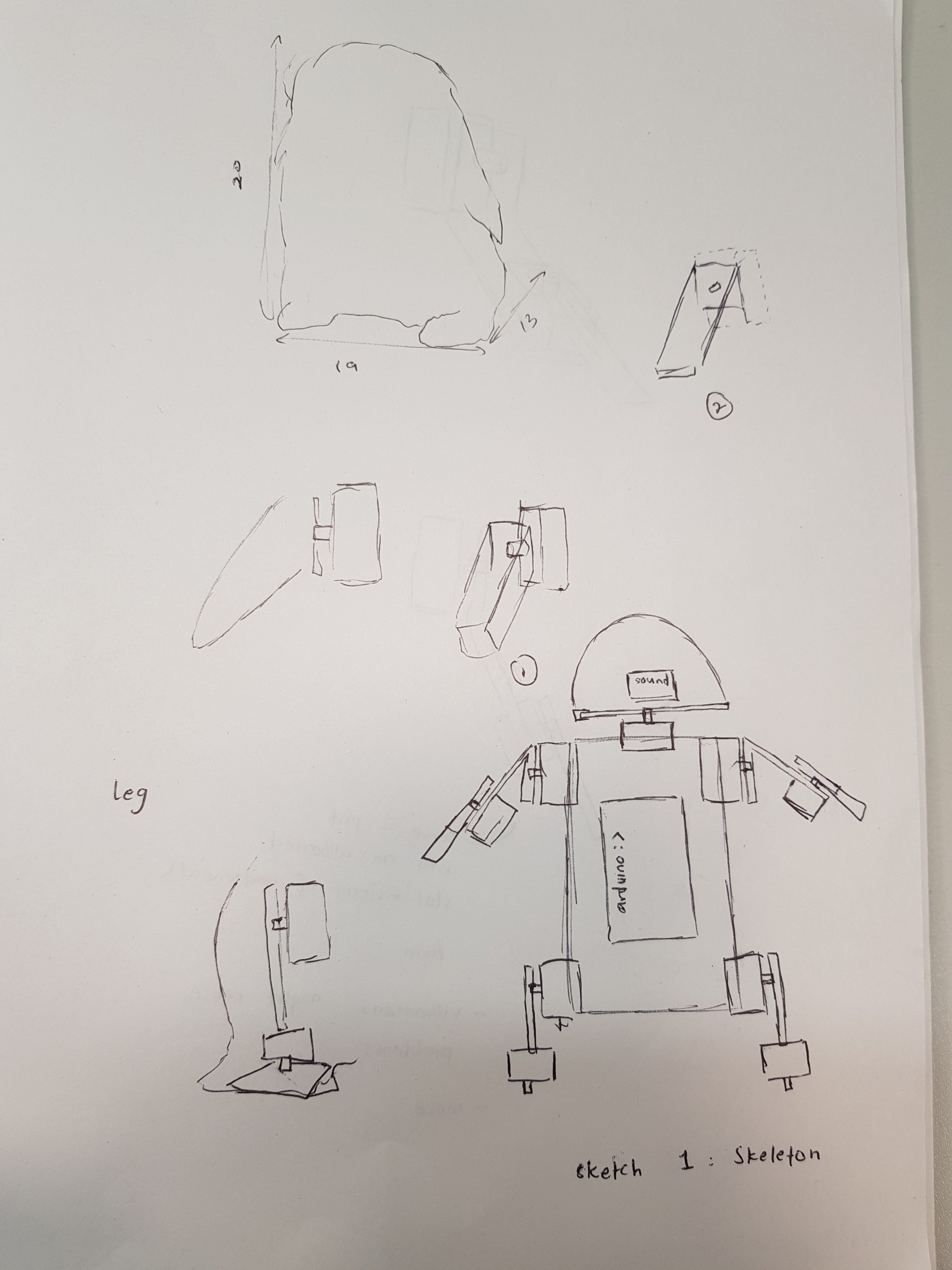
Initial Skeleton Design
12/12/2019 at 12:34 • 0 comments
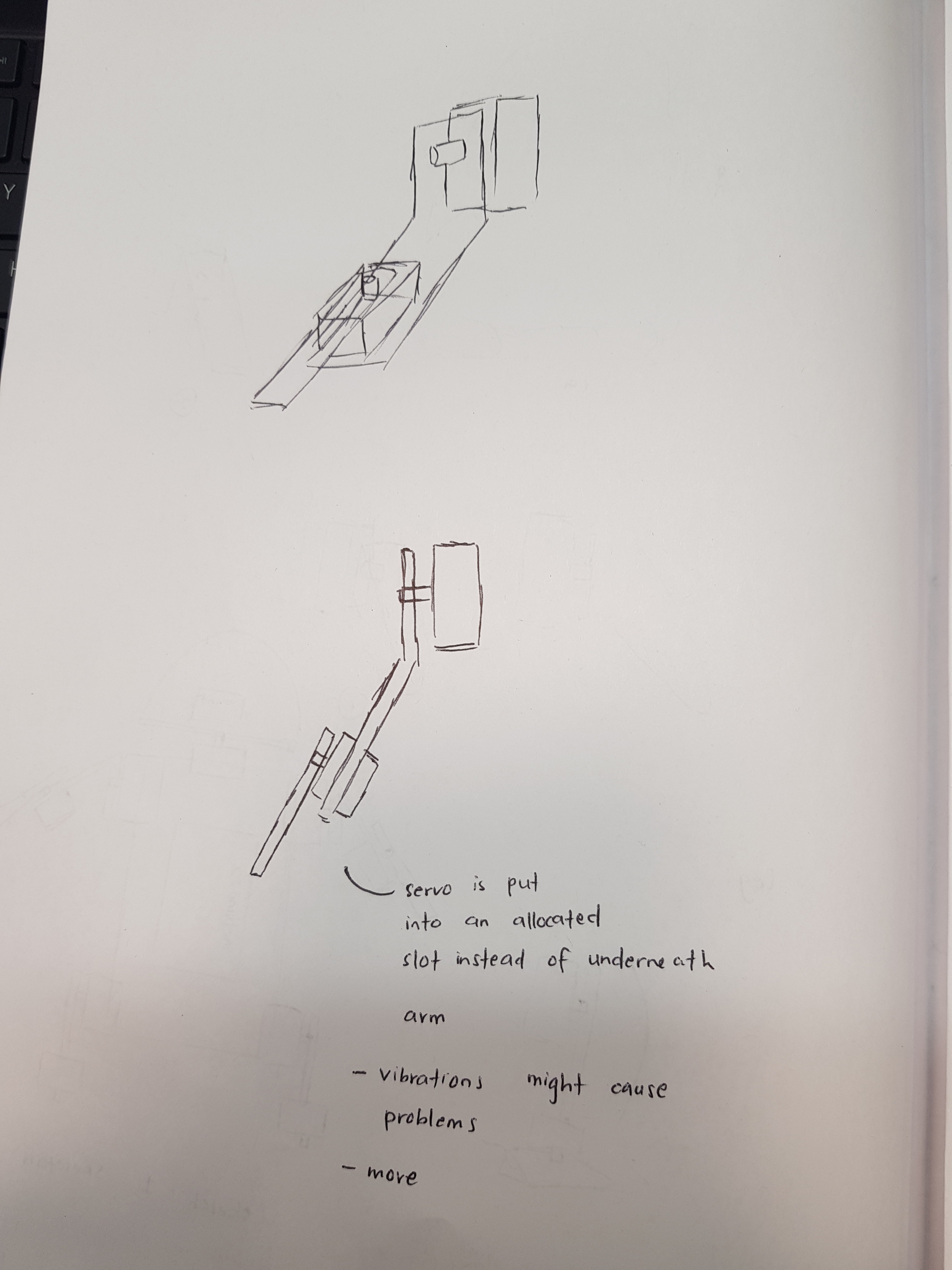
Initial skeleton design was made by considering the size of the plushie bought, and the number of servo motors available (more can be taken, but I settled with 9 first to make it simpler). The servos are attached to the main body, which would be the Perspex cut into a square shape and then attached to a board which would rotate. On the rotating board, servos would be attached so it would support more articulation of the limb. Several iterations were made so that if the first didn't work, the others might.
3D printed parts might work, but I will start off with laser cut parts first as it would be less time consuming. Only after I managed to work out the movements and the motion capabilities that I would consider creating a custom part for the Penguin
-
Why Penguin?
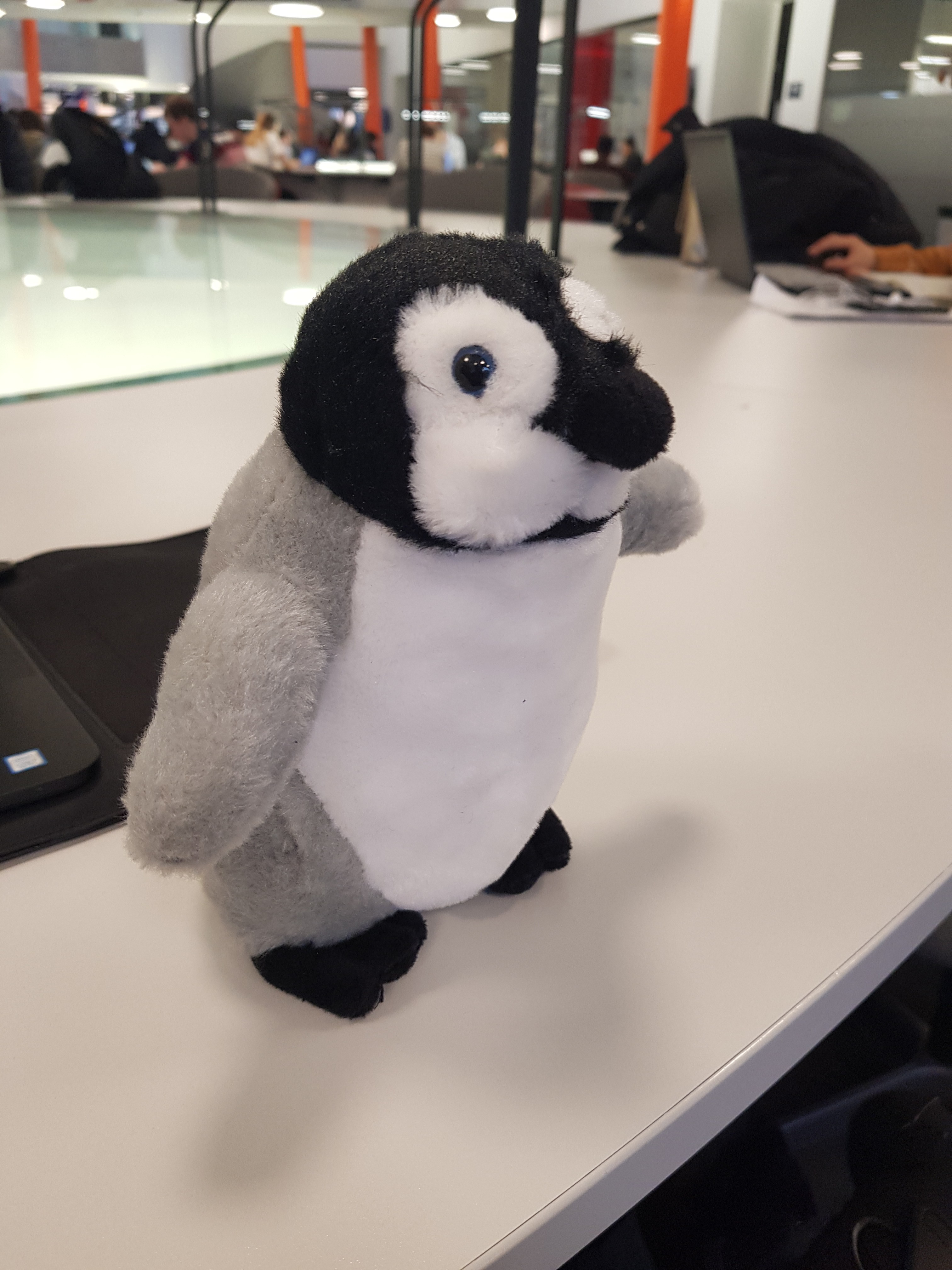
12/12/2019 at 12:26 • 0 commentsAn animal had to be chosen for making the companion robot. I have narrowed down my choices to three: an Owlet, Baby Penguin and a Wombat. Through several comparisons in multiple categories such as cuteness, basic knowledge on the animal and ease of mobility, the Penguin won the selection.Penguins aren't known for their efficient way of walking, therefore, it might have problems in waddling. Prototypes will be made by just having the skeleton first, attached with servos to test the its capabilities to produce basic motions such as walking and waving. A plushie was bought for £5 to help me visualise and make the initial skeleton (and probably to hug it during this cold winter too)
Companion Penguin
A companion robot based on a penguin (For those who wants a penguin but hates the cold)