This project was spurred on by the work completed for the NASA Nebraska Fellowship. I wanted to build an analog version of the digitally driven motor driver designed for the 3D Scanner Arm, shown in another project.
The main specifications for this project are:
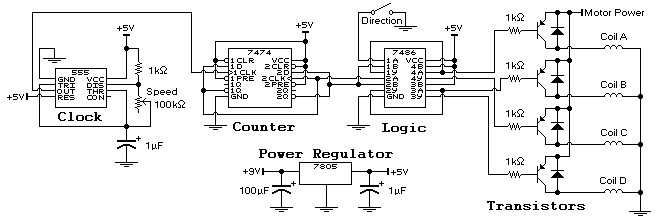
- Drive a unipolar stepper motor,
- Drive the stepper motor in both forward and reverse directions,
- Be driven purely by analog circuitry.
At the time of the start of this project, there weren't any circuits that met these specifications that were found. So, here's my design for the circuit.
The first revision of this board did not have the decoder, so the stepper's movement is choppy. The next revision will incorporate the decoder to fix this issue.
 Arnov Sharma
Arnov Sharma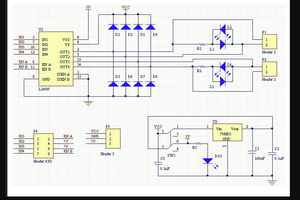
 silver2row
silver2row
 Peter Buckley
Peter Buckley