Yann Guidon / YGDES
Yann Guidon / YGDES-
Relevant datapoints
11/09/2018 at 03:02 • 0 commentsGiven the new situation and hardware availability, what should it do and how should it work ? What is the characteristic that determines then binning ?
So far, I think that the meaningful data is the average between the open and closed voltages. The early measurements show that there is a significant variation of those characteristics and the operating margin is reduced when the max. release voltage in a group gets near the min. latch voltage of another relay, whose coil has characteristics shifted toward the lower voltages.
The algorithm I consider will take the dump of all the measurements, in the form of a file (in CSV or JSON) containing the min and max voltages, followed by the serial number.
From these values, calculate the average (or sum?) and difference (the margin).
Sort all the values by the difference, and remove the lowest ones (which provide the least operating margin).
Then sort all the values by the averages, such that bins can be easily made by splitting the list in roughly equal sub-lists.
And there you have it : a list of lists of serial numbers of the relays that will be soldered together.
For the 8×8-bits register set, that's 8 bins, and I suppose at least half of the measured relays will be rejected so more than 120 relays must be measured. The resulting sets will be more resilient to power supply variations.
Now I have to build the test rig, write the software, and get to work by measuring 4 boxes of relays...
-
Reboot !
11/08/2018 at 03:22 • 4 commentsI should return to this project since #YGREC8 makes progresses !
I'm considering a much simpler approach where the relays are tested "in condition", as a latch. No more voltage measurement or current control. In fact, things have changed since the last logs : I now have a computer-controllable PSU that can receive orders from my laptop !
I'm also avoiding RPi now. I haven't powered one up for more than a year and I don't miss it. I like the convenience of my computer and it can already do some limited IO with the digital PSU. So what's remaining is the input... I don't have a SPI input on that PC so I must also use a USB serial adapter :-(
What will I measure ? I reduce the system to its basic purpose : measure the voltage where the relay latches and releases (if possible, a few cycles to get a better average). The input is just a single bit, coming from the relay's contact. It must then be possible to hack a USB thingy to act as that binary input. A keyboard ? No. A mouse ? ah, we're getting somewhere :-)
So let's take a USB mouse with 2 buttons. The rotary encoder is left alone, and one button orders to start the test sequence, and the 2nd input is the output from the RUT (Relay Under Test). Our program will poll the buttons and talk to the digital PSU, ramping the output voltage up and down. When the sequence starts, the output voltage will slowly increase until the relay closes, then decrease until the relay opens. The cycle is repeated a few times and each value (except the first ones because hysteresis has not settled) are sampled and computed.
A serial number is allocated and marked on each relay while their characteristics are stored in a file. After testing tens of relays, the file can be analysed, sorted and binned.
That sounds like an ice plan.
-
Programmable current generator
11/01/2016 at 15:10 • 0 commentsThe last time I designed a test rig, it had a crude but cute 4-bits R/2R ladder with a 2N2219 (metal can with hfe=100) for current amplification. It was nice enough to inject increasing amount of current into the DUT's Vcc input in 17 steps (0..15 and full-on with a 5th bit, so yeah, 5 bits DAC).
For this system, I need something more accurate and more resolution : ideally sub-mA resolution (100µA resolution but not necessarily accuracy since accuracy will be relative and correlated between all the measurement). Maximum required current in 100mA so a 1024 steps generator works to measure significant data.
But this is not as easy as it seems, each chosen topology has their own inconvenients.
The original R/2R-Ladder version is not precise or accurate, but this was not the purpose, I just wanted to inject "some current". It was actually not that inaccurate, BTW, but the BJT can drift with temperature and power supply voltage... Furthermore, the bipolar transistor's threshold voltage of approx. 0.7V means that the very first steps are ineffective.
I've used a trick though : the NPN transistor is mounted "high side" so the initial current is actually the 1/100th base current coming from the R/2R ladder. Short circuits are very easy to spot early withouth any damage. The ladder is powered from a 74HCT273 (octal latch with reset) tied to 5V so full-scale will provide 5V on the BJT's base, and the DUT's voltage can be measured (a high-side resistor heps infer the actual current).
Maximum supplied voltage is around 5-0.7=4.2V (depending on Rsense drop), full 5V is then provided with a P-MOSFET to short all that when we're sure the circuit's ramp-up curve is clean. It's pretty neat and safe to detect shorts on the power rails but not suitable for coil characterization.
In the current case, I need accuracy and resolution. Hence, some kind of feedback. Also, from past experiences, I must reduce the count of reference voltages to the least possible. A single 4.096V reference should be enough, so all the drifts are proportional and cancel each others. After all, I want to group relays in "similar" bins, I don't have an "absolute" requirement, they should be as close to each other as possible.
The same device (ADC) must measure the coil voltage and the current. Using Ohm's law, we can make a simple string, for example with a sense resistor on the lower side, and the DUT just above.
Rsense coil Transistor 0V |----\/\/\/----o DUT o--------T-----| 5V 10 ^ 39 ^ V1 V2The coil voltage is relative but not critical, it can be obtained from V2-V1. V1 gives an absolute reading of the current .This simplifies the grounding and there are only 2 voltages to measure. This topology is easy on the DAC because these nodes are low impendance, which should reduce the inaccuracies created by high-impedance transmission. A 12-bits ADC with 4.096V reference will have a 1mV bit-step, or 100uA step. Very nice.
The Rsense is easy to calculate: given maximum 100mA and 1V drop (leaving 4V headroom for the DUT+Transistor), Rsense=1V/0.1A=10 Ohms.
Do I have 0.1% 10 Ohms resistors in stock ? I found 1/2W 10 Ohms resistors that should fit but I can't validate the absolute value and accuracy with my lousy tools. Power would not exceed 1V×0.1A=0.1W so 1/2W provides a comfortable margin. Current-induced temperature drift will be low thanks to the ceramic package.
(Just in case, I ordered some 1% parts)
OK I got 1% 10 Ohms resistors. How can I get a better precision ? A series-parallel connection can even out the little differences. It takes 4 resistors, but can also sustain 4× more power.
|----\/\/\/-------\/\/\/---| | | |----\/\/\/-------\/\/\/---|Well, that was the easy part. The hard part is how the heck am I going to feed the current into this R-DUT chain ?
A high-side transistor is required. I'm not sure what kind, yet, though, but more important is how to control it.
I don't trust the PWM output of the Pi for a cheap/crude DAC, nor the previous R/2R ladder. Ideally, I'd have a 8-bits, parallel-input DAC, to provide feed 0 and 64mA in the coil. 64mA/256=0.25mA resolution, it's still good enough since the worrying deviations are in the order of 5 to 10mA.
Rumaging through my archives, I found a couple of samples (Thank you Maxim!) of parallel-input, latching R/2R DACs:
(I got plenty of other DACs to play with but I wanted DIP and other low-tech features)
Fed with the common 4.096V reference, it is possible to create 256 voltage steps. An opAmp (rail-to-rail, please) will then compare this control voltage with the sense resistor's drop (a ÷6.4 divider network is necessary though). The error will drive the pass transistor, to create a classic voltage-controlled current generator.
Note: a 2.56V reference creates a 1:4 ratio, easier to create with 5 precision resistors.
Souces of relative errors will be
- the curent-sense resistor
- the offset from the opamp
- the 1:4 resistor divider
- any spurious resistance in the ADC
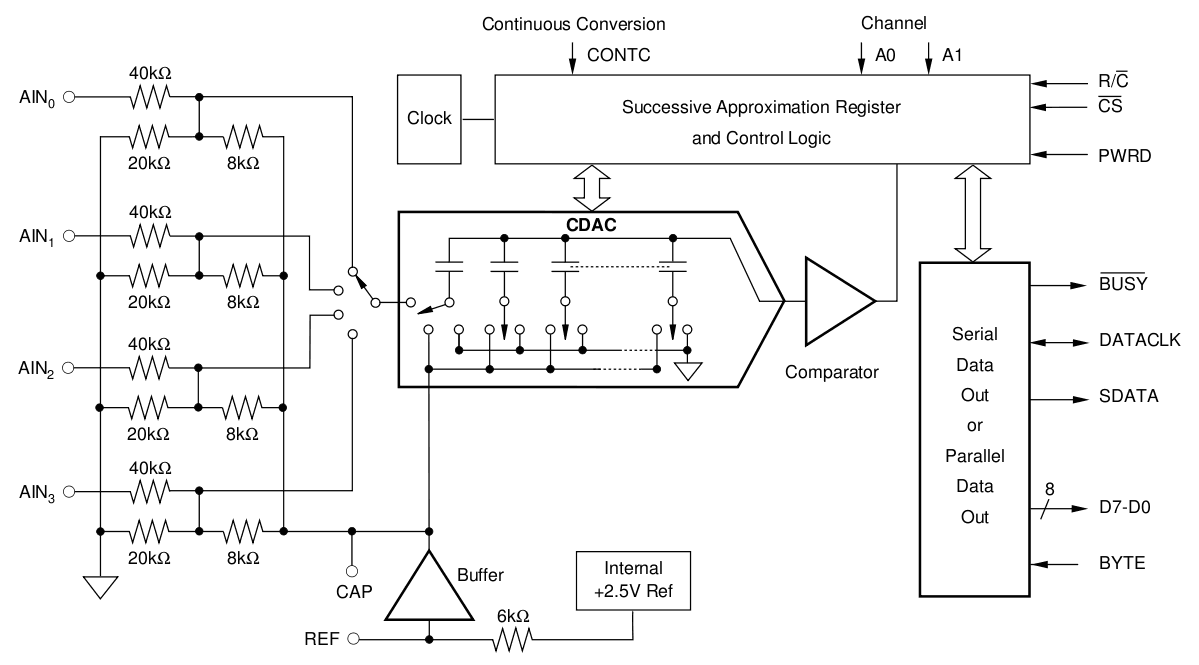
For the ADC, I elected to use a Burr-Brown ADS7825P. Thank you TI.
This is an old but fast (40Ksps) bipolar 16-bits successive approximation converter with 4 inputs and serial and parallel output. Input range is -10V to +10V with an internal 2.5V reference. I've used it in my previous test system so I can reuse some code.
Wait, 2.5V is not far from 2.56V, and the datasheet shows that the internal reference can be "pulled" a bit. The block diagram shows that a resistor connects the internal ref to the internal buffer so it can be overridden.
![]()
From the PDF:
External Reference Voltage Range for Specified Linearity: 2.3V to 27V
So let's use the same 2.56V external (buffered) reference for the ADC and DAC ! There is no harm because the input voltages will not reach 10V anyway and the conversion from binary to volt will be much easier.
This ADC has 4 inputs that can enhance the precision. Assuming the ADC actually outputs 2.56V precisely, we must read (2^16/8=) 0x2000 if we connect the REF to one analog input pin (plus or minus a few LSB values because of whatever non-linearities). Similarly, we can use the remaining analog input to check the DAC's output. The system becomes self-calibrating !
From the PDF (p15):
CALIBRATION
The ADS7825 has no internal provision for correcting the individual bipolar zero error or full-scale error for each individual channel. Instead, the bipolar zero error of each channel is guaranteed to be below a level which is quite small for a 16-bit converter with a ±10V input range (slightly more than ±32 LSBs). In addition, the channel errors should match each other to within 16 LSBs.For the full-scale error, the circuit of Figure 9 can be used. This will allow the reference to be adjusted such that the full-scale error for any single channel can be set to zero. Again, the close matching of the channels will ensure that the full-scale errors on the other channels will be small.
Again, my goal is to sort relays and bin them in relative characteristics, not precisely absolute, so it's fine.
Voltage reading:
The 2.56V reference lets the ADS7825 sense between 10.96V and -10.96V (minus a meaningless LSB).
The range of 2.56V is quadrupled by the 1:4 input resistors, then doubled again for the negative range, the 0x0-0xFFFF range sets the 2.56V value at 0x2000 (8192). Each LSB is 312.5µV (10mV/32), instead of a more complex decimal number... The datasheet claims an accuracy of 32LSB, or about +/-4 bits, or 5mV, which is reasonable for this application.
The only problem is that I don't find a 2.56V reference IC. I only see 2.5V references :-(
I have to find a trick though. An ugly one comes to mind: reuse the 2.5V internal reference and "pull" it by 60mV toward the 4.096V reference. The internal 6K bufer resistor is probably in the 10% precision range so a certain amount of "fine tuning" is necessary with a multi-turn pot.
What is the value of the "pulling" resistor ? First, let's evaluate the current that is required to "pull" the 2.5V reference output to 2.56V: deltaV=2.56-2.5=0.06V. R=6K, I=0.06/6000=10µA.
U=4.096-2.56=1.536V, R=U/I=153600 Ohms
The calibration procedure would adjust the trimpot until the reading is 0x2000. Adjustment for 0V offset is not yet certain because of ground noise but a sliding switch could do the trick...
The other solution is to simply recalibrate on the fly, during each measurement cycle: read the 4.096V ref input along with the others and apply a rule-of-3 to get the actual value. But then there is no 2.56V input to the DAC to generate proper voltage steps.
The ADC measurements suffer from unknown offset but this offset might be mitigated by another trick. It's possible to measure/sample the voltage at the mid-point of the current sense resistor. Given the fixed point at 4.096V, an unknown current but a known relationship between the resistors, it is possible to calculate the 0V offset.
|----\/\/\/--*-----\/\/\/---| | 10 | 10 |----o Coil o--------Transistor |----\/\/\/-----*--\/\/\/---| | 10 | | 10 | | REF3240 1K 1K | | | |__| | | | S1 S2 S3 S4This reduces the uncertaintlies created by some parts of the DAC but creates the need of a software control loop to control the DAC directly off the 4.096V reference. Or from whatever because it doesn't matter anymore where the reference comes, since it's always adjusted. The DAC might as well be fed from the ADC's 2.5V reference (through a buffer, like a spare OpAmp).
Given a software control loop (not too fast to prevent EMF in the coil), it's possible to autocalibrate the whole system. For each of the 256 currents, measure everything and compute the best fitting parameters.
A further calibration point can be created by shorting S2 and S3 to reduce unknowns and compute the offsets of each input. A MOSFET or a relay would work.
(to be continued)
-
SPI Interface
11/01/2016 at 13:46 • 0 commentsThe RPI is not a true real-time system, unlike a common microcontroller.
How do I evenly sample the inputs ? RPi SW can have some serious jitter (been there, done that...) but I have solved this for some years now, using the FIFO of the SPI port.
At a reasonable speed (in the 100K/1MBps range), the 16 bytes are enough to shield the system from interferences. JUST AVOID INTERLEAVING READS AND WRITES TO THE I/Os or the bus turnaround time will give you a penalty of 1/2µs.
In non-interruptible task mode, running as root, the kernel will interrupt the task once per second, which is well above the 5ms sampling time of a transition. Just don't forget to yield to the kernel after each sequence (nanosleep() ?) and you'll be safe.
How many data points do we actually need ? I believe 1K is the most that is required. Current is more important for binning with my logic topology. I can use a real computer screen to show the histogram (in framebuffer mode ?)
The other cool thing about the SPI port is the variable speed, which can be pretty finely tuned with the clock generator. But the UGLY secret of this port is the 9-bit scheduling, which inserts one dead bit cycle for every byte (I'm not kidding you, check with your scope !) so the actual sampling rate must be calculated carefully !
.
.
(to be continued)
-
Sampling
11/01/2016 at 11:44 • 1 commentOne issue with @matseng's circuit is the sampling of the inputs: it will miss pulses shorter than the sampling period (10 or 5µs). Faster sampling means more CPU load yet no garantee to catch that 50ns spike that may happen. Sampling theory in all its glory...
The solution is on the hardware side.
I have examined how the input signal could create a longer pulse (>10µs) but the analog circuit becomes too quirky quickly. I want a very high impendance (to catch any "phantom" signal) and no constant RC time (to run at arbitrary speeds). I don't want to change or tune an analog part whenever I change the sapling rate.
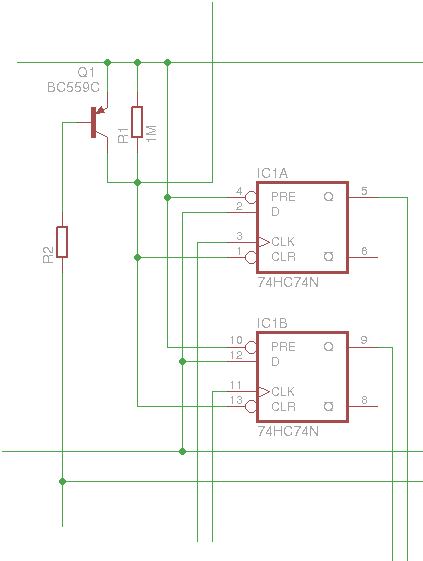
My solution uses full digital CMOS : the 74HC74. It's better to use an integrated Set/Reset latch because a discrete version (with transistors or 74HC00 gates) will work slower and might miss very short events.
The events are asynchronous so the sampled signal is tied to the asynchronous /SET input (active low, so there must be a pull-up resistor). Then after the sampling, the latch must be reset: the Data input is tied to 0V and the synchronous clear signal is tied to CLK.
There is still a small but non-zero chance that a short event arrives during the clear transition. There is some uncertainty about the behaviour in this case and more importantly, it's hard to copy the latched value at exactly the same time as it is being cleared.
The solution is overlapped sampling : both latches of the 74HC74 are used but with shifted clocks.
![]()
Of course, all events will be seen as a half-sampling-period longer but no event that can be sensed will be missed. And it works at any sampling frequency (within the datasheet's specified range).
For the sensing itself, the IC's pins are used directly. A 1M pull-up keeps the signal from floating and the very high value creates a reasonable RC time. If we consider the pins and traces to have about 10pF of capacitance, a short-to-0V event will be stretched to a few microseconds.
The 1M pull-up is shorted on demand by a PNP transistor. This follows a discussion on #ReTest - Relay timing tester's comments: dry vs wet contacts. R2 is selected to give about 100mA current in the transistor to simulate a full load.
20161108: Following suggestions, due to unavailable stock and for better speed, I got some SN74AC74N. It's rated for pretty high speed so it won't miss a 10 or 5ns pulse.
ReTest-yg
YG's own version of Mateng's ReTest, but with different features and a palindromic project number!