 ekaggrat singh kalsi
ekaggrat singh kalsi
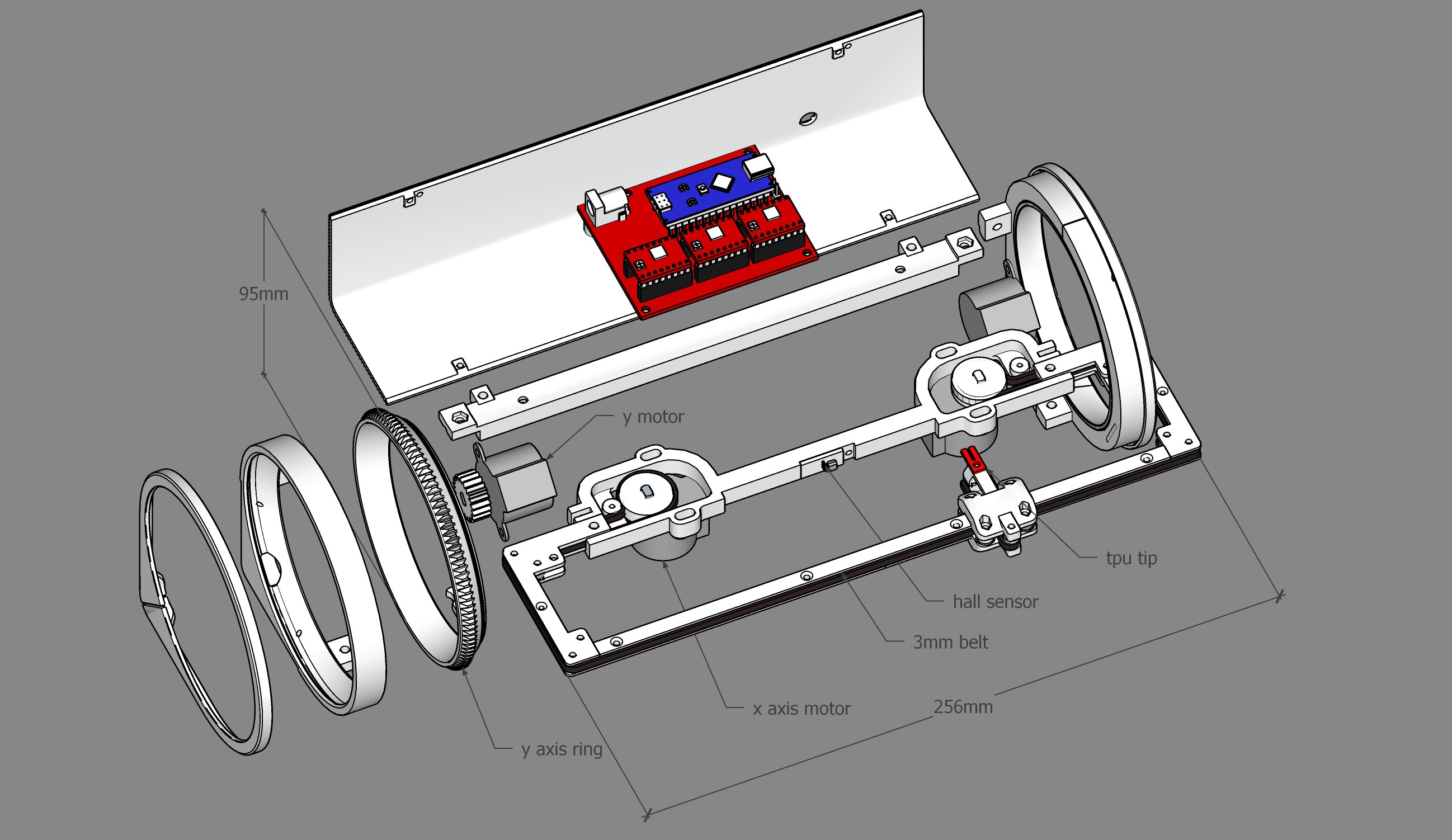
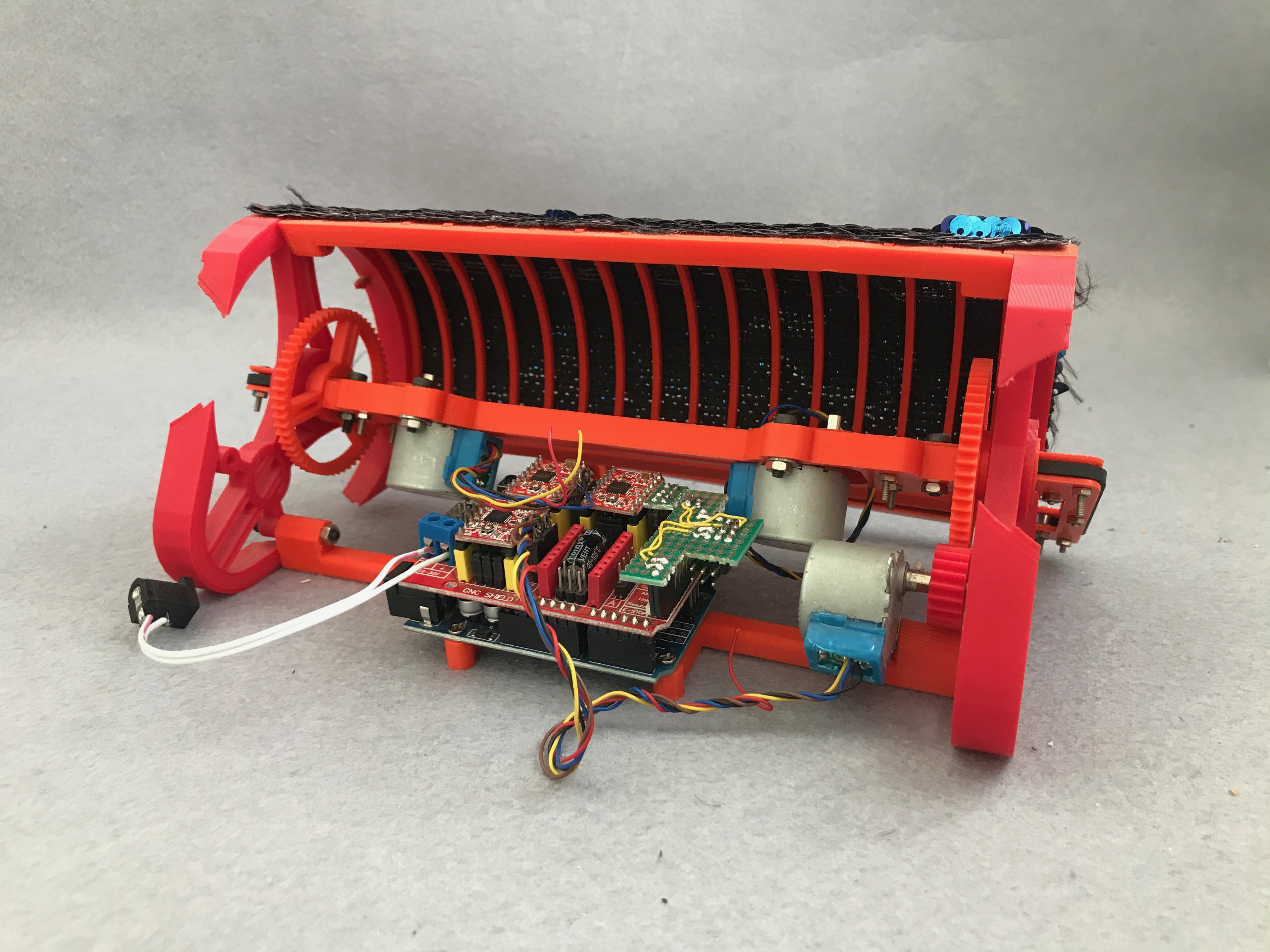
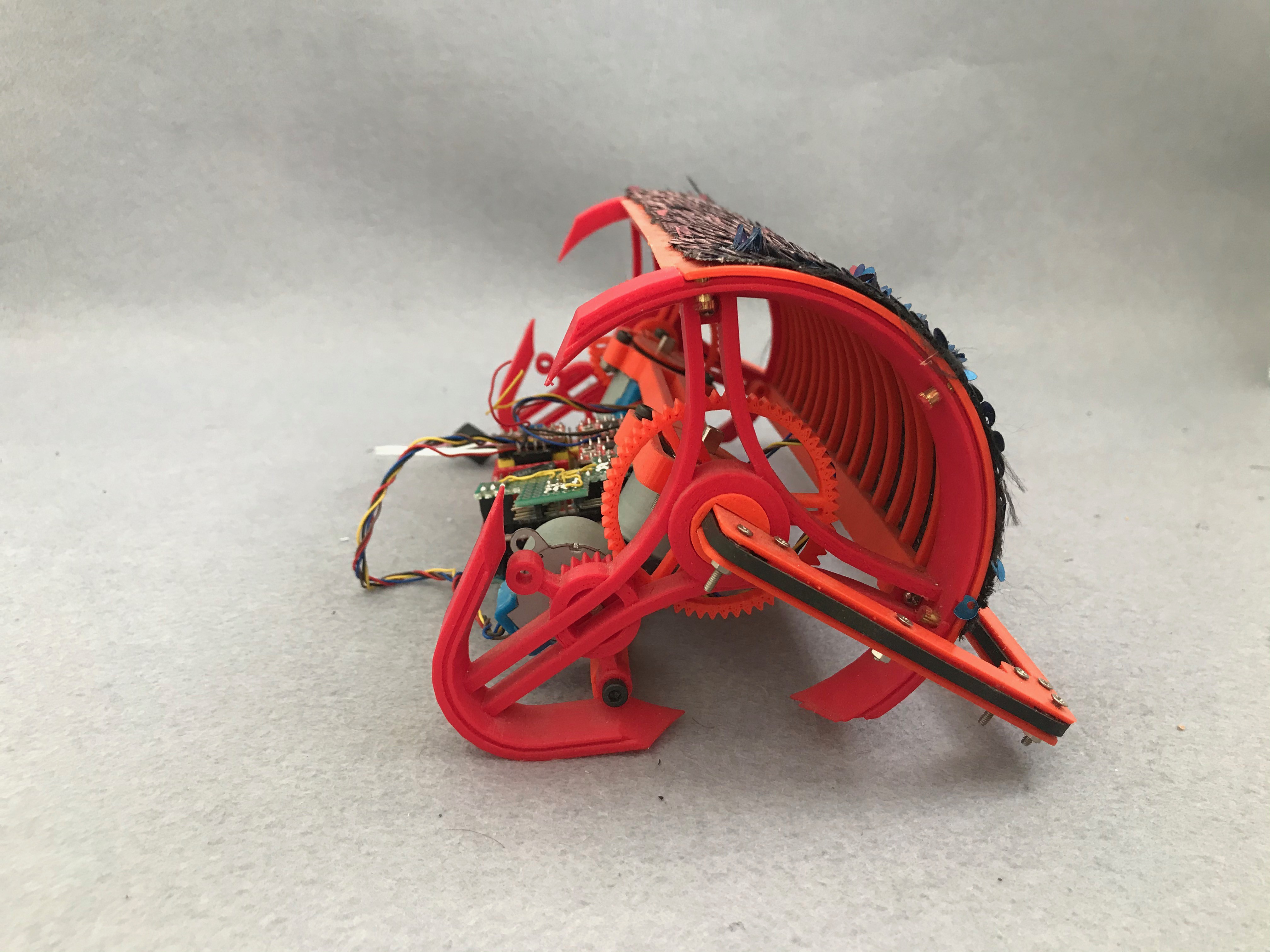
The kinematics
The kinematics of the clock consists of a mix of h-bot and Cartesian system. The y axis consists of the two rings on the extreme ends of the clock driven by 2 24byj48 motors . The rings are basically gears constrained in outer rings similar to a hubless wheel. The x-axis consists of a strut holding the two rings together and driving a belt routed on a h-bot based path. The belt is driven by two motors. The motors when moving in the same direction move the pen carriage left or right on the x-axis while when then move in the opposite direction move the pen up or down.
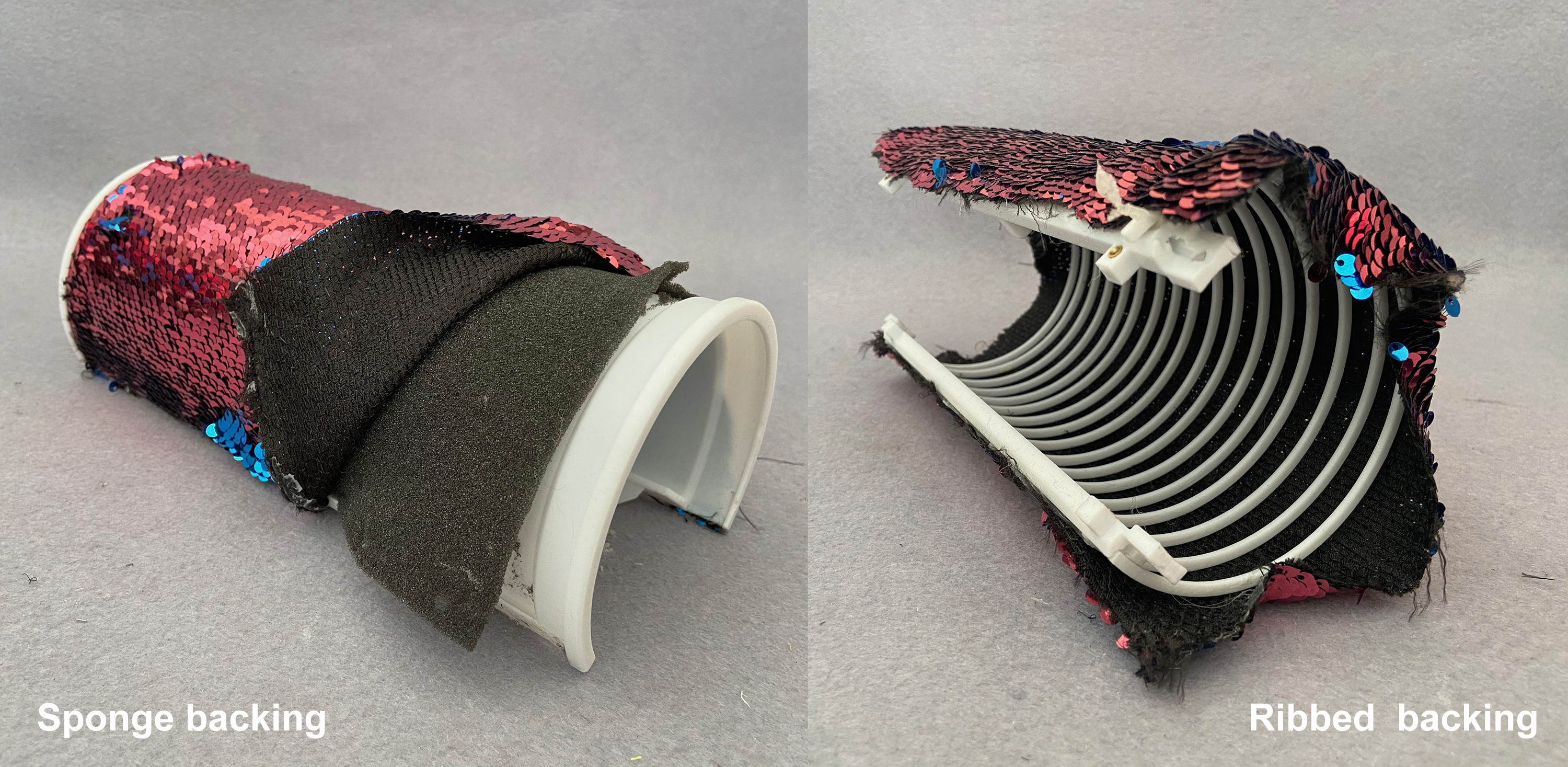
Figuring out the cloth backing
The Sequin cloth consists of disks which are stitched to a a fabric backing. The Disks flip easily with a finger as they are mounted on a t-shirt or a bag which has a soft backing .But the moment i mounted it on cylinder it stopped flipping as the disks got over constrained by the hard backing . First i tried a ribbed structure as a backing with the fabric stretched on it. It worked but made it very complicated to construct.
Finally i figured it out that a simpler way was to just add a 3 mm sponge as a backing to the cloth to give the disks the freedom to flip.
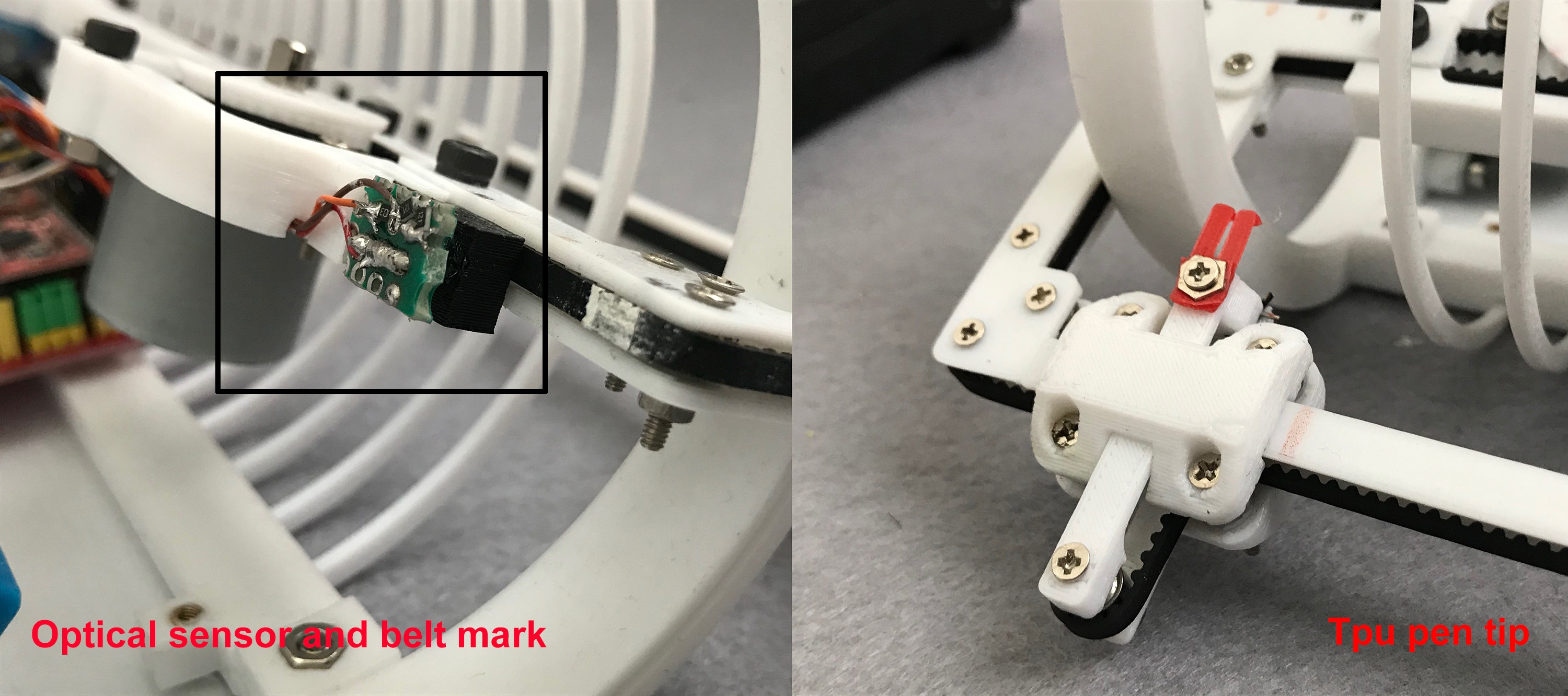
The tip of the pen
The tip of the pen was very tricky to figure out. Getting a material to act like the tip of a human finger is not very simple. The disks are very slipper and need just the right friction to flip them. The final solution was tip make of Tpu with a split hook.



















 Stefan
Stefan

 Michael Möller
Michael Möller
 Steve
Steve
Ideas to clear the current time.
1. Move rotational axis until it contacts table & slightly lifts drum. Then continue rotation of drum to reset all flipped bits. Slowly return to release drum & start writing.
2. If you have the rotational force & inertia control.
Spin of display drum. Then apply rapid deceleration to flip bits. Then slow rotation & stop when display is at readable position.
You may get away with just a rapid rotational jerk via an erase solenoid mech.
I read this was used to free a stuck flip display on an early NASA craft but can't find the reference.
To speed up writing new time.
Change gantry bar to have a in/out tab at each horizontal but position.
Then encode the whole line with head setting each tab as it moves at speed across the bar.
Then run the rotation setting on the whole line.
This could be bi-directional.
It could also do the reset by setting all tabs engage at the bottom line then rotate to the top.
The only hardware change is adding the tabs on the inside edge of bar & moving the head to traverse the outer edge of bar.
Hope this helps Chromii from Oz