Victor
Victor-
Working
11/18/2020 at 11:31 • 0 commentsI setup everything an tested. At the end, I didn't like the final result. The movement is very jerky and Cetus remote interface leads to latency increase and sudden stops. It just can't work together on Beaglebone. With local interface, like tklinuxcnc it works, but my goal is working without LCD. I move to Arduino mega.
-
Actual testing on CNC
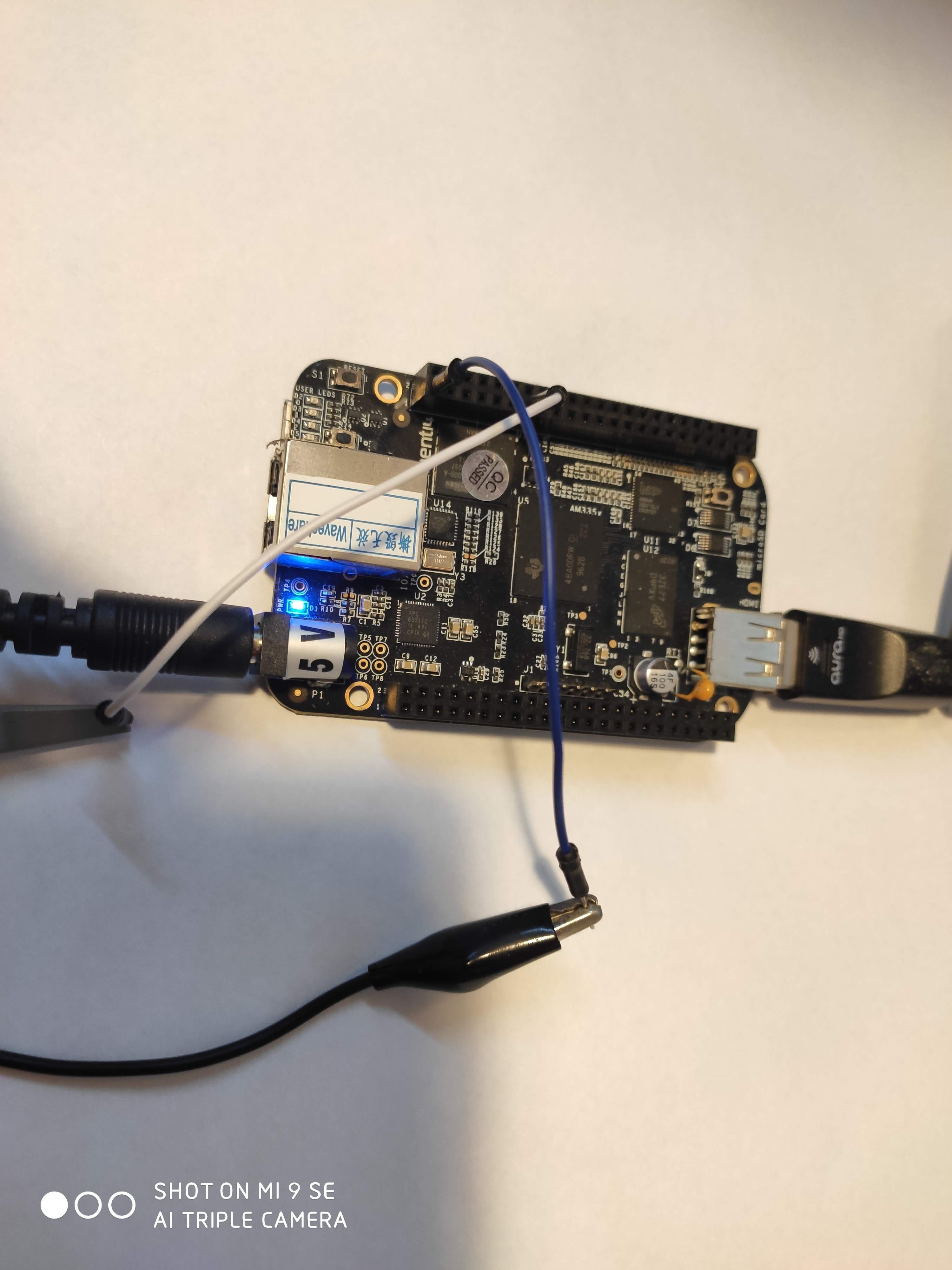
11/07/2020 at 16:52 • 0 commentsFirst moves, some code tweaks. Axes working, need to setup limit switches. I saw some discussions, where people talk about levels compatibility. Beaglebone output is 3.3V. I can say that my drivers (TB6600) working good, despite 3.3V level input.
I added a github source to the project: https://github.com/victor999/easycnc
![]()
![]()
-
Boards
06/13/2020 at 16:33 • 0 commentsBoards arrived, time for testing everything
![]()
![]()
-
Testing signals
04/04/2020 at 17:14 • 0 commentsHardware works.
X step signal
![]()
![]()
-
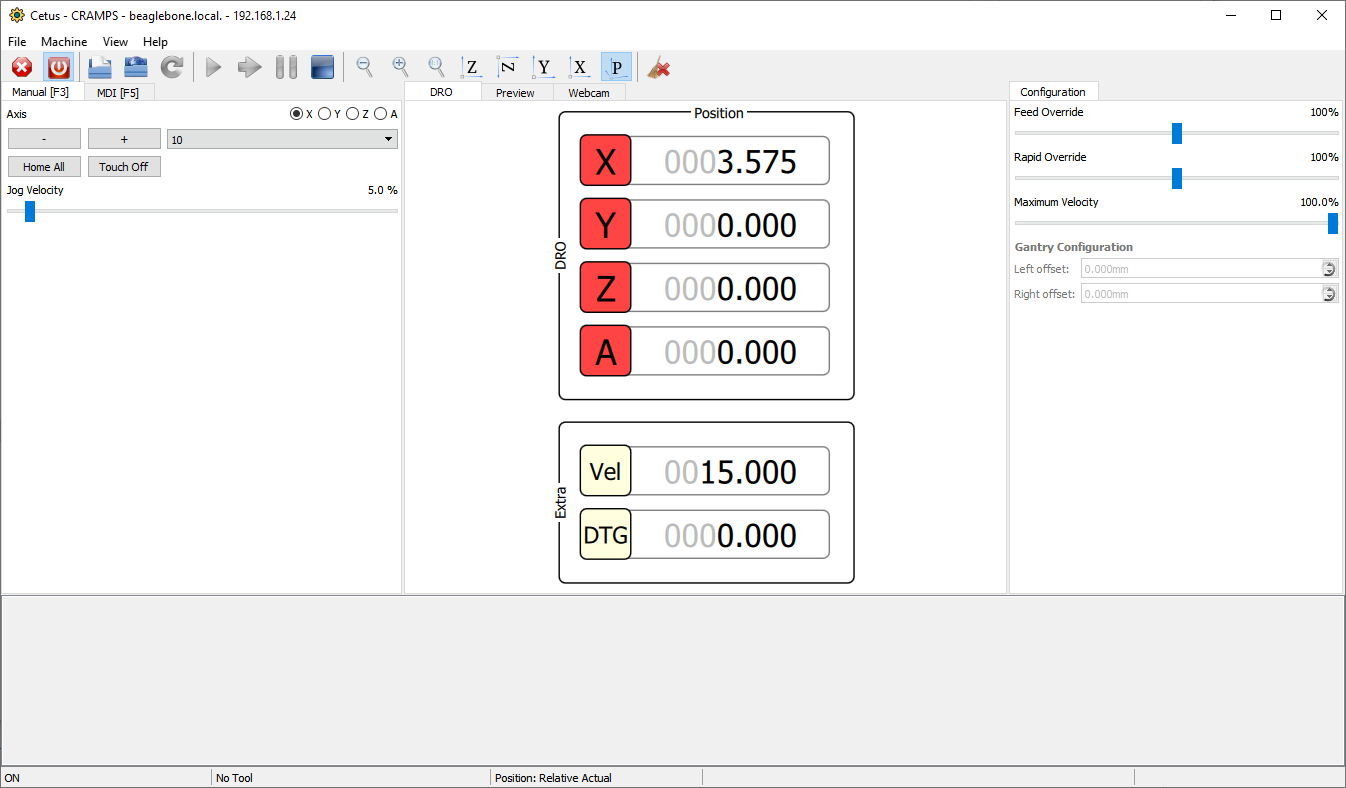
Remote interface - Cetus
04/04/2020 at 17:00 • 0 commentsI managed to connect to the Beaglebone remotely via mklauncher and Cetus.
The file can't be run, since beaglebone is not connected to real hardware and can't be homed.
May be I will create a guide how to run it. Now it is something useful and I have to connect it to the steppers.
![]()
![]()
-
Available interfaces for the machinekit
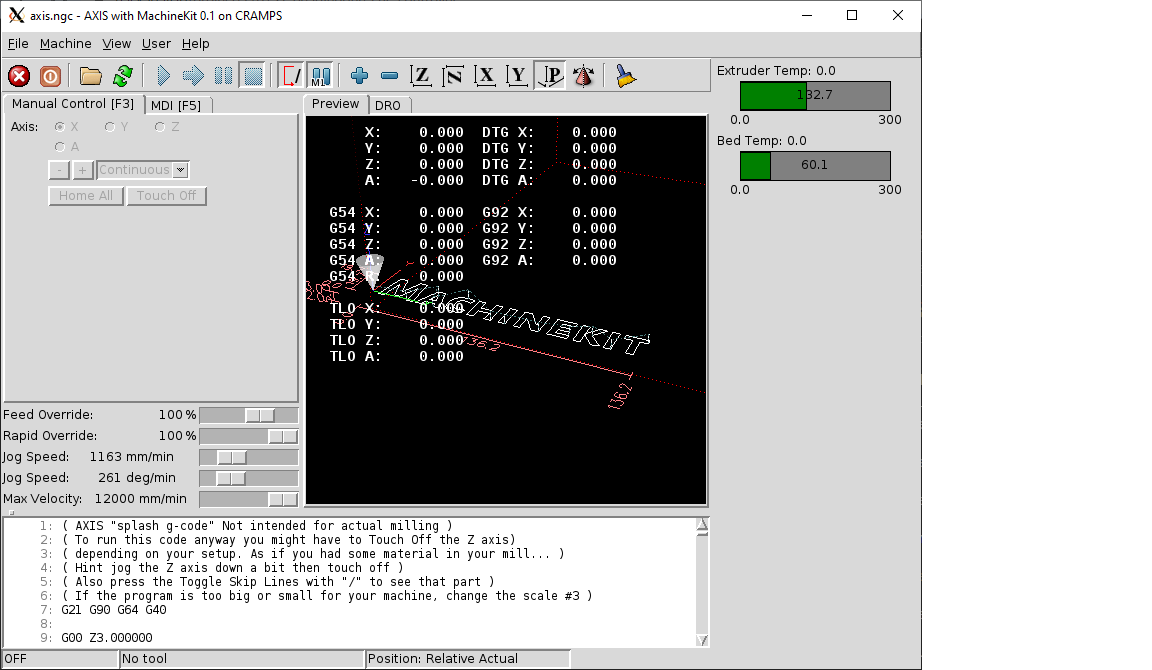
04/04/2020 at 12:28 • 0 commentsMachinekit can be started with different interfaces. They can be configured with setting DISPLAY variable in INI configuration file
AXIS (unfortunately it crash, when I try to load a cut file):
![]()
tkemc (this one seems to load OK, but refuses to run, since machine need to be homed first):
![]()
There is also a few remote interfaces that need to be tested.
-
Progress so far
04/04/2020 at 11:25 • 0 commentsMy TinyG controller burned and can't be restored. Currently I set up an Arduino Uno with external drivers and GRBL firmware. My goal is to replace Arduino with Beaglebone Black, since only 3 axes are supported in GRBL.
Conclusions so far:
Beaglebone Green Wireless can't be used, because some needed pins are occupied.
The machinekit image for the Beaglebone can be downloaded from:
I changed the image to be flashable (by changing uEnv.txt) and flashed it to the EMMC
I use it with WiFi USB stick that can be configured as described here
For the connection I use putty and Xming with X11 forwarding. In this way you don't need a display on the BBB. You see everything on your PC.
I installed samba on the BBB and created a shared folder for quick files transfer.
Machinekit can be run by simple command:
machinekit
I see the machinekit interface on my PC and I selected CRAMPS as an interface board.
To be continued...
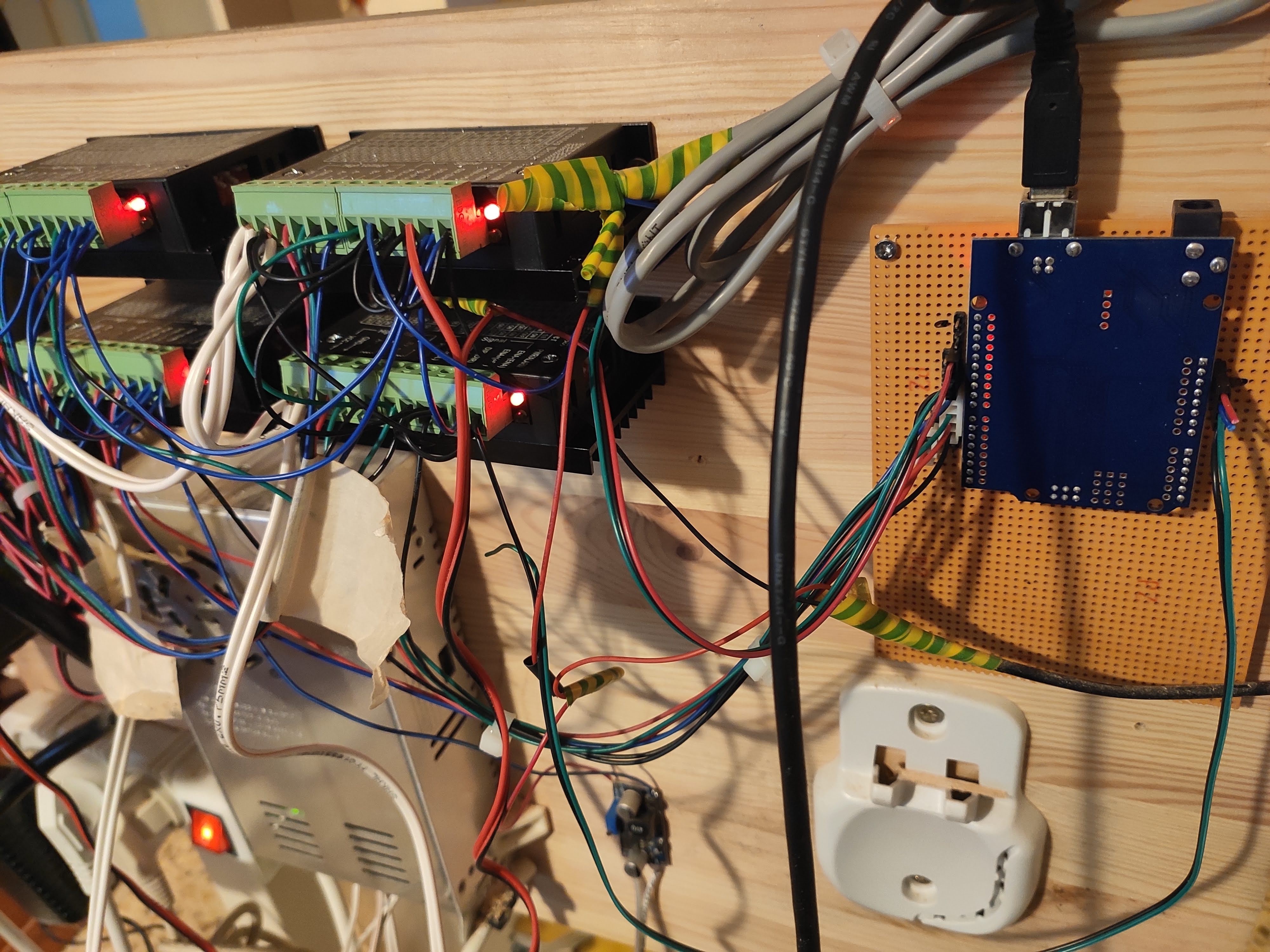
My current setup - Arduino is going to be replaced, may be.
![]()
Beaglebone CNC controller
Attempt to build a 4 axis CNC controller from the Beaglebone black