Mykolas Juraitis
Mykolas Juraitis-
Converting wheeled robot to tracked
08/07/2021 at 14:55 • 0 commentsRobot's wheels were replaced by tracks which allows it to traverse previously inaccessible terrain, especially outdoors:
-
Nanny robot
07/25/2021 at 12:10 • 0 commentsnaminukas robot used as a nanny with a new way to control it - via hobby RC radio:
-
Beach trip
05/30/2021 at 22:13 • 0 commentsRobot attempts various modes of locomotion on the sand and pebbles:
-
Robot crawls on water
03/21/2021 at 20:10 • 0 commentsNaminukas robot can crawl like a caterpillar by periodically tilting its feet. I decided to try if similar motion can work not only on a solid surface but also on a liquid, allowing the robot to crawl on water. Here is a result:
-
4 ways robot can move on snow
02/10/2021 at 23:13 • 0 commentsNaminukas robot has many ways of locomotion. 4 of them (including 1 completely new one!) were tested on a slippery pavement partially covered by snow and ice:
-
Self-righting mechanism
01/27/2021 at 20:55 • 0 commentsI have created a 3D printed self-righting mechanism for naminukas robot which can be directly controlled by the robot's wheel without any additional sensors or actuators:
-
Transformation to balancing mode in slow motion
12/30/2020 at 20:01 • 0 commentsRecently I have been working to improve 2 wheel balancing mode. To debug robot's behaviour I captured few slow motion clips:
-
Ski driving stunt
12/13/2020 at 15:58 • 0 commentsSkiing is an automotive driving stunt where the car is driven while balanced only on two wheels, either the pair on the driver side or on the passenger side. Since only 2 wheels are used to perform this stunt, I decided to try it on naminukas robot. Opposite to the car, this robot's center of gravity is quite high, therefore robot tilts only a little bit. The robot uses an onboard accelerometer and gyroscope to determine to which side it is falling, and tilts wheels accordingly to maintain the balance. Oscillations could probably be minimised by better PID tuning. Currently, only proportional and derivative parts are being used.Steering is implemented by turning wheels at different speeds.
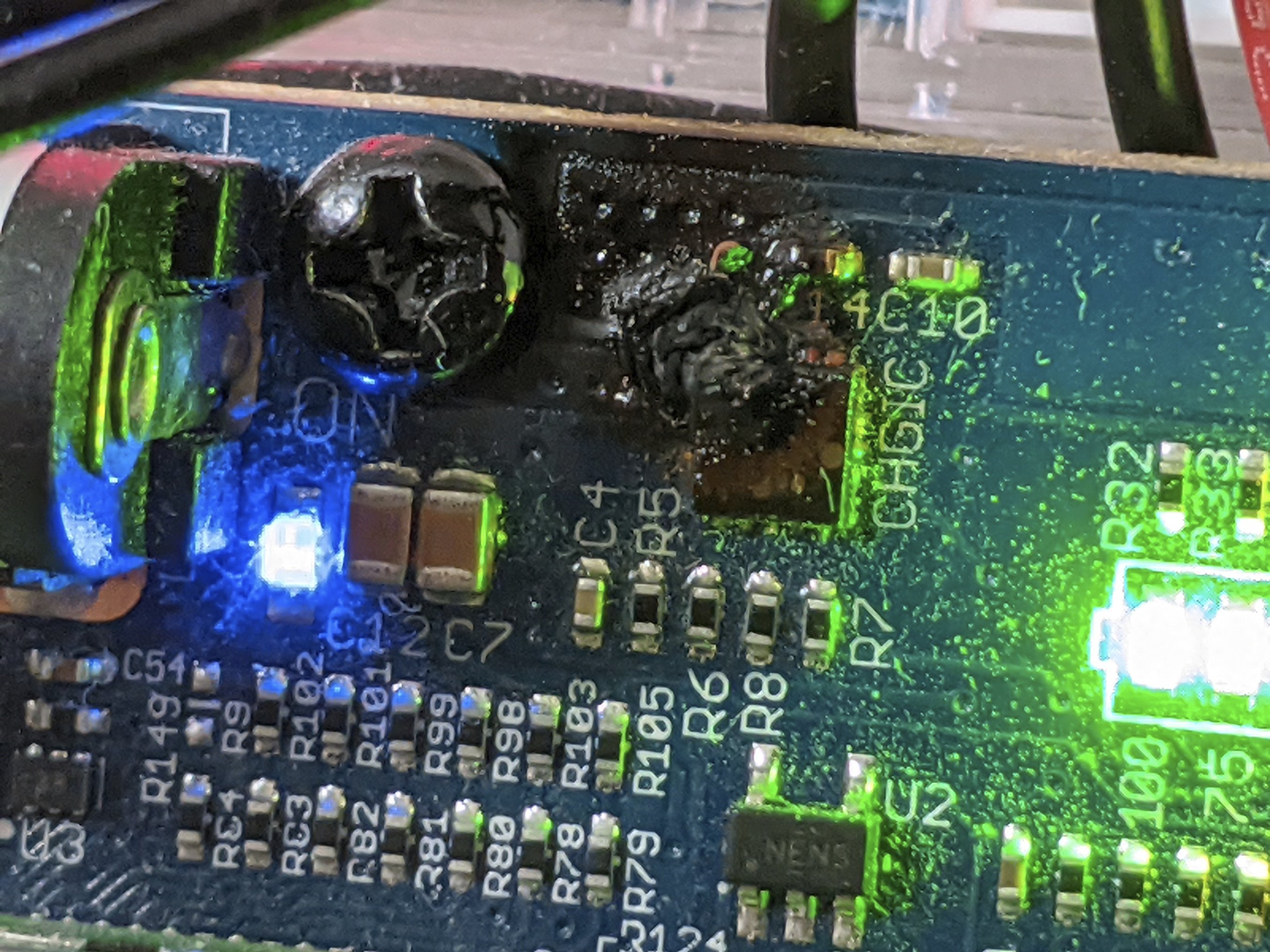
Unfortunately, while filming this video, I accidentally plugged my laptop charger to the robot's BeagleBone Blue charging port, which fried the charging circuit. Surprisingly, it seems that nothing else was fried, but I can't charge my robot any more :( Here is the damage:
![fried charging circuit]()
-
Stereo camera in action
12/07/2020 at 13:02 • 0 commentsAfter endless hacks and upgrades I finally got Intel RealSense Depth Camera D415 working reliably on BeagleBone Blue computer. Using USB2 connection camera is only capable of 6 FPS but at least simple computer vision applications are possible at this speed. For example tracking object position and orientation:
-
Robot than can move even placed in a bag and submerged underwater
11/09/2020 at 08:43 • 0 commentsIn previous videos it was demonstrated how the robot can move like a caterpillar by periodically tilting its feet back and forth out of phase with each other. Such motion allows the robot to traverse narrow passages. This video demonstrates another advantage of such motion. Since robot's feet in this mode of locomotion doesn't need to turn full circle, robot would be able to move even if enclosed in a flexible material. For example, putting the robot in a plastic bag, waterproofs it without affecting ability to move.
naminukas
Pneumatic walking, driving, wall climbing and tool using robot