Pavel G.
Pavel G.-
Working leg prototype
08/29/2020 at 00:45 • 0 commentsLeg prototype
Key updates:
- Single arduino can control 2 servo (my plan for 4 per arduino) - 0.7 ms per update now
- Leg Kinematic seems like ok
- Python test app
-
Leg prototype
07/25/2020 at 19:33 • 0 commentsLeg kinematic prototype
Upper and lower links are 150mm each
-
Electronics update
07/14/2020 at 18:05 • 0 commentsUpdate:
I switched from L298N to TMC2130 SPI stepper drivers.
TMC2130 biggest advantages:
- Size
- SPI mode to control coils directly via XDIRECT
- Less wires - now i can control 4+ motors/servos with single arduino nano
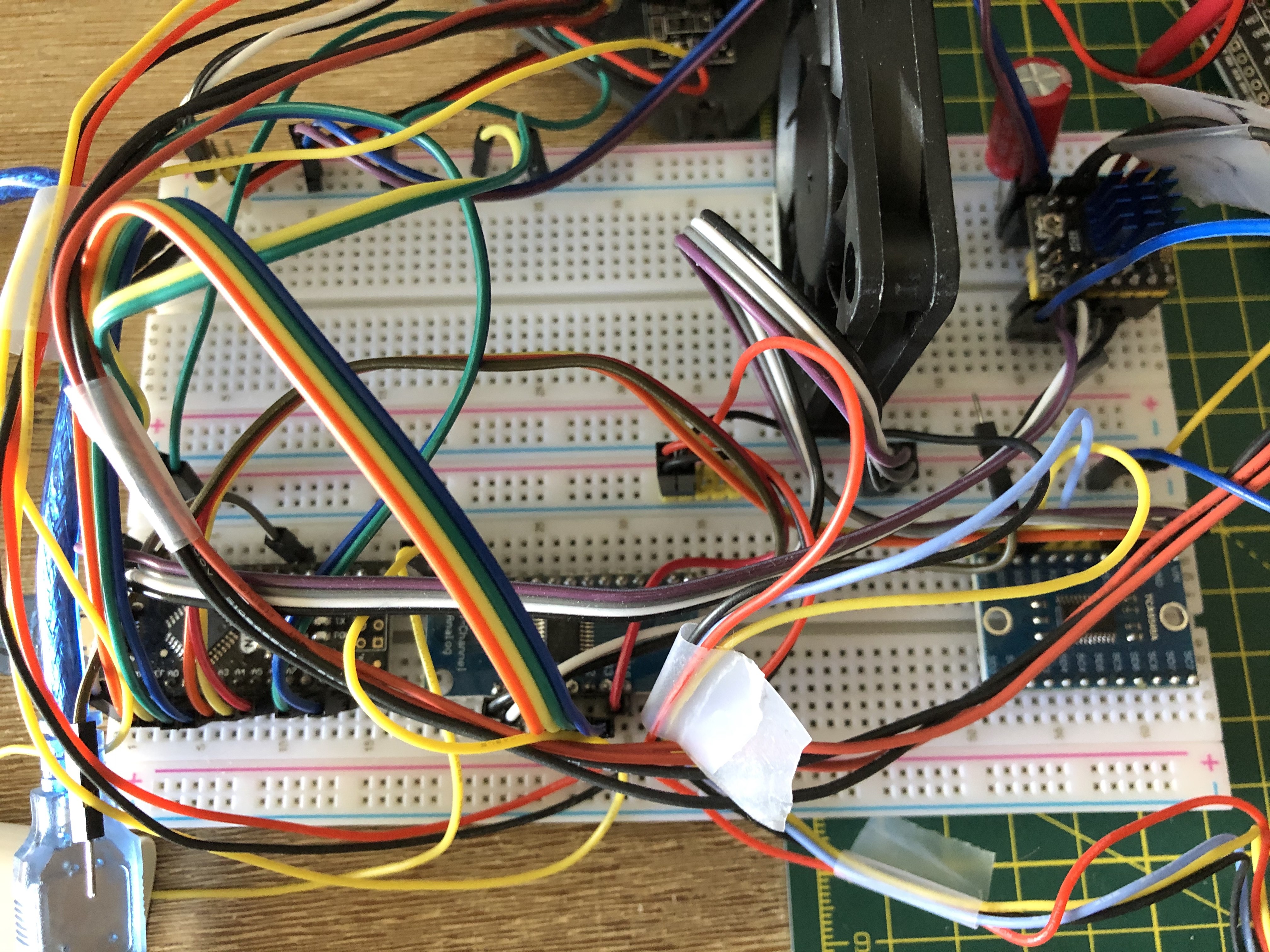
My current setup:
![]()
- Arduino Nano
- 16CH A/D MUX HP4067 - to get values for up to 16 hall sensors (up to 8 motors 2 halls per motor)
- TCA9548A - to get data from 8 absolute encoders (AS5600 i2c devices)
- TMC2130 SPI drivers
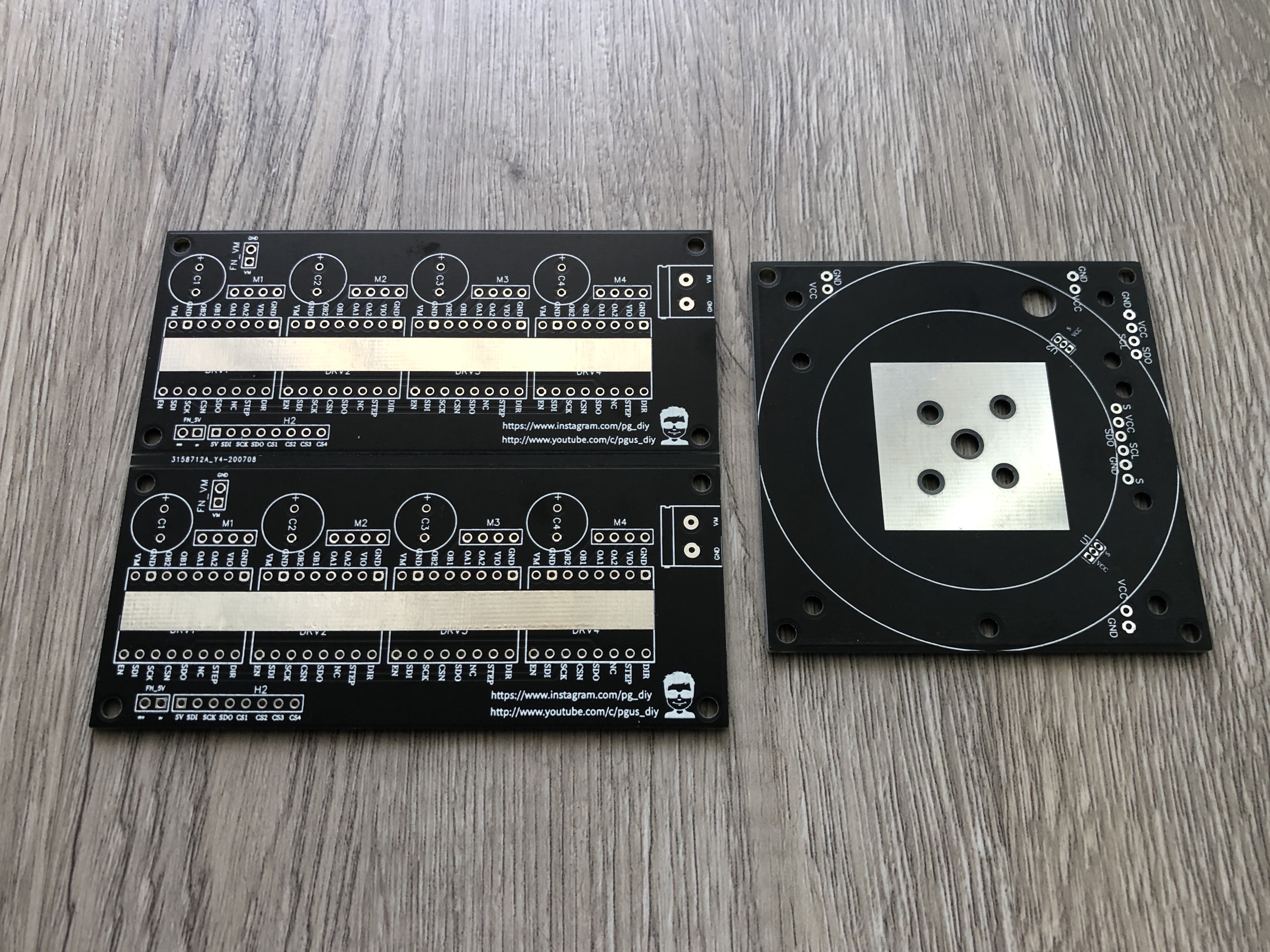
Experimental PCB's
![]()
Left PCB for 4 motors drivers, right PCB is a base for motor with hall sensors and mounting holes
Auto calibration finalized, calibration results saved to EEPROM
-
Stator wiring machine
06/26/2020 at 19:06 • 4 commentsTo rewire motors(very boring process if done by hands) i made a simple machine.
Details:
- Marlin+Ramps 1.6 as electronics
- RepitierHost as software
- Python g code generator - https://github.com/pavlog/RobotUtils
Final result:
![]()
-
Gearbox v.1.1
06/07/2020 at 23:08 • 0 comments2 Weeks spent for Gearbox V 1.1
Whats new:
- Dowel pins
- Herringbone gears used
- Ratio 1:30.8148
More updates coming soon...
-
Gearbox
05/07/2020 at 23:58 • 0 commentsGeneral
I decided to develop gearbox with ratio from 1:25 to 1:35 to archive 180 degrees per second with full torque (i hope).
Small backlash is acceptable (at least for robot leg actuator)
All designs will be created in Openscad.
Design
I had a few experiments in the past: So my favorite designs are:
1) Spur Pinion double gears organized in 3 gears per stage (each stage is a 3 spur-pinion gears at triangle corners) with ring gear as output: Openscad drawings and visualization will be uploaded soon.
This type of gearbox have 1:33 ratio (can vary, but not limited at max)
2) Cycloidal - i experimented in past, I got 1:25 ratio (strong limit for 70x70 cm footprint), but my past experiments had some Issues (mostly because of missing bearing at critical places)Best ideas for Cycloidal you can see here:
https://hackaday.io/project/165653-3d-printed-robot-joint-with-active-compliance
https://hackaday.io/project/167855-simple-cycloidal-robot-leg-for-quadruped
Gearbox exploded view concept
Key features:
- Ratio: 1:33.1852 (1st stage 1:2.66, 2nd 1:2.666 output is a 1:4.66)
- Output gears module can be bigger then stage modules
- Gear height can be different for each stage
- Place to embed as5600 i2C absolute rotary sensor (2$ on aliexpress)
- Extra stage can be added without problems (1 extra stage and you can get 1:88 ratio)
- Only output stage is rotate (all double gears are rotates on the static common shafts)
- Each stage have 3 points of contact (less backlash and more torque)
Gearbox disassembly video
Assembled gearbox
![]()
Actuator test without absolute encoder
Gearbox test with absolute encoder
-
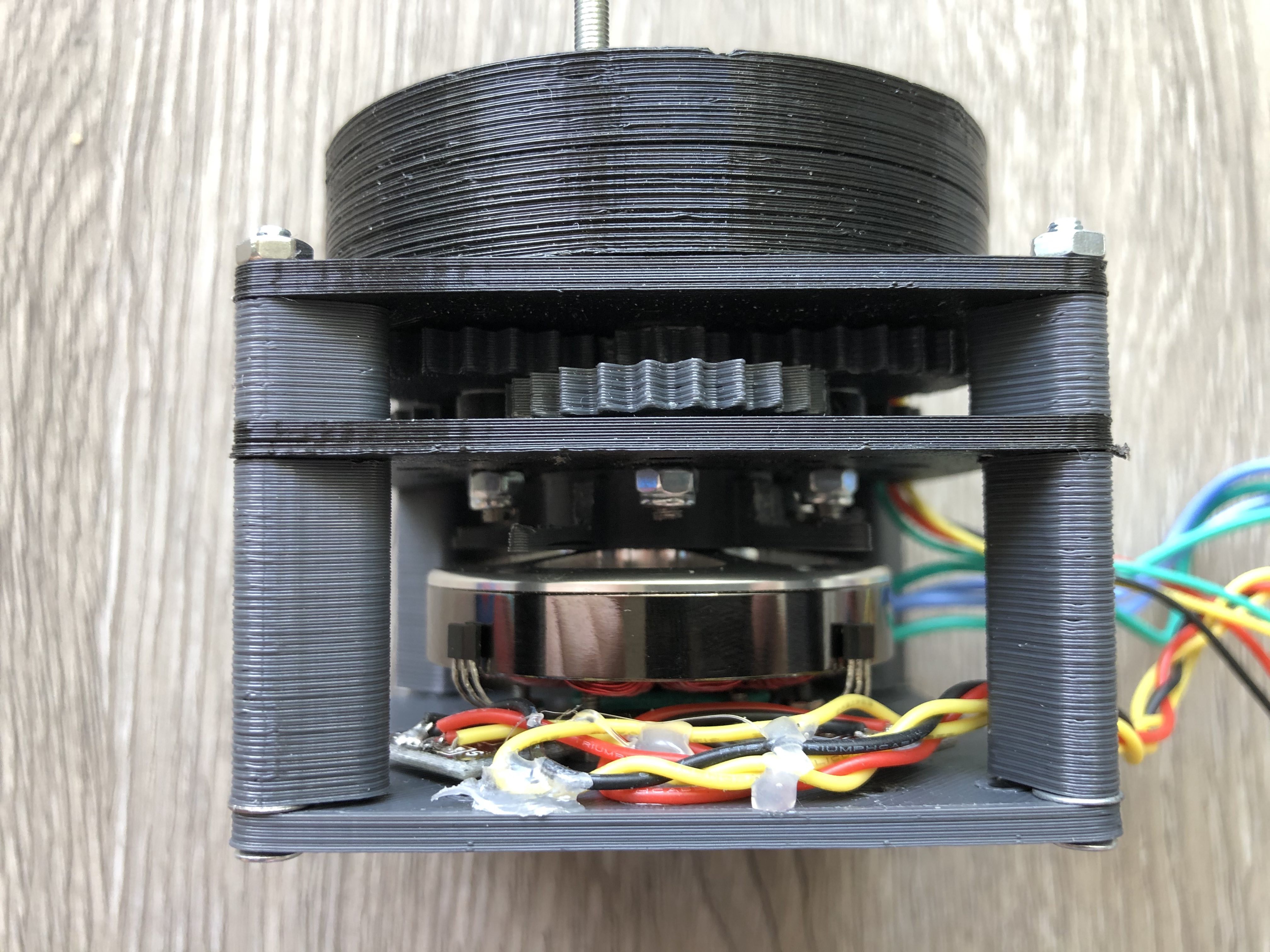
Motor
04/29/2020 at 08:10 • 0 commentsMotor theory and practice
I use brushless 5010 motor rewired as stepper motor with 28 steps per revolution, controlled by L298N module, arduino and 2 hall effect sensors
Image bellow is a 3 phase brushless motor (5010 model) with 14 magnet poles and 12 stator poles, this motor need to be rewired as stepper motor with 28 steps per revolution
![]()
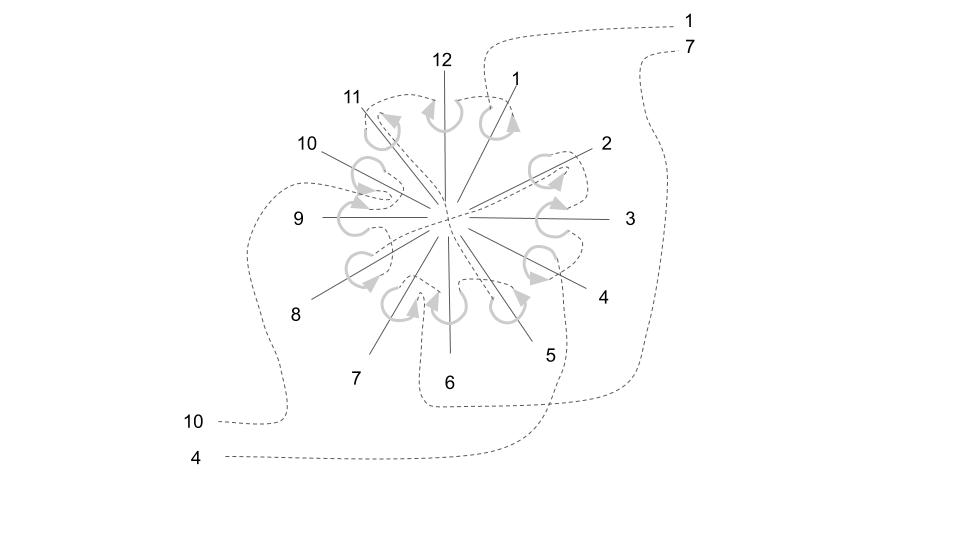
Motor wiring diagram (14 magnet poles, 12 stator poles) converted to stepper motor (top view)
NOTE: Arrows lines is always on top of stator lines
![]()
Motor phases animation with wiring above visualized in video bellow
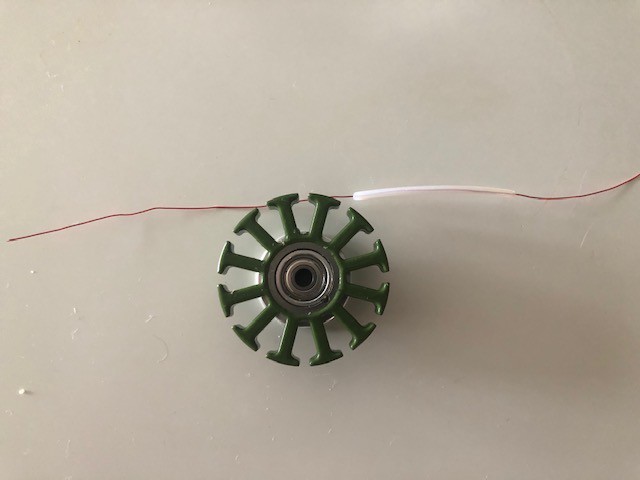
Disassembled motor ready for rewire
![]()
I use small radius PTFE tube as a helper for rewiring
![]()
100 turns per pole by 28 AWG wire (very challenging process)
Final resistance 3.7 Ohm per phase
![]()
Assembled motor (wires covered by nail polish (pole 1 marked by blue)
![]()
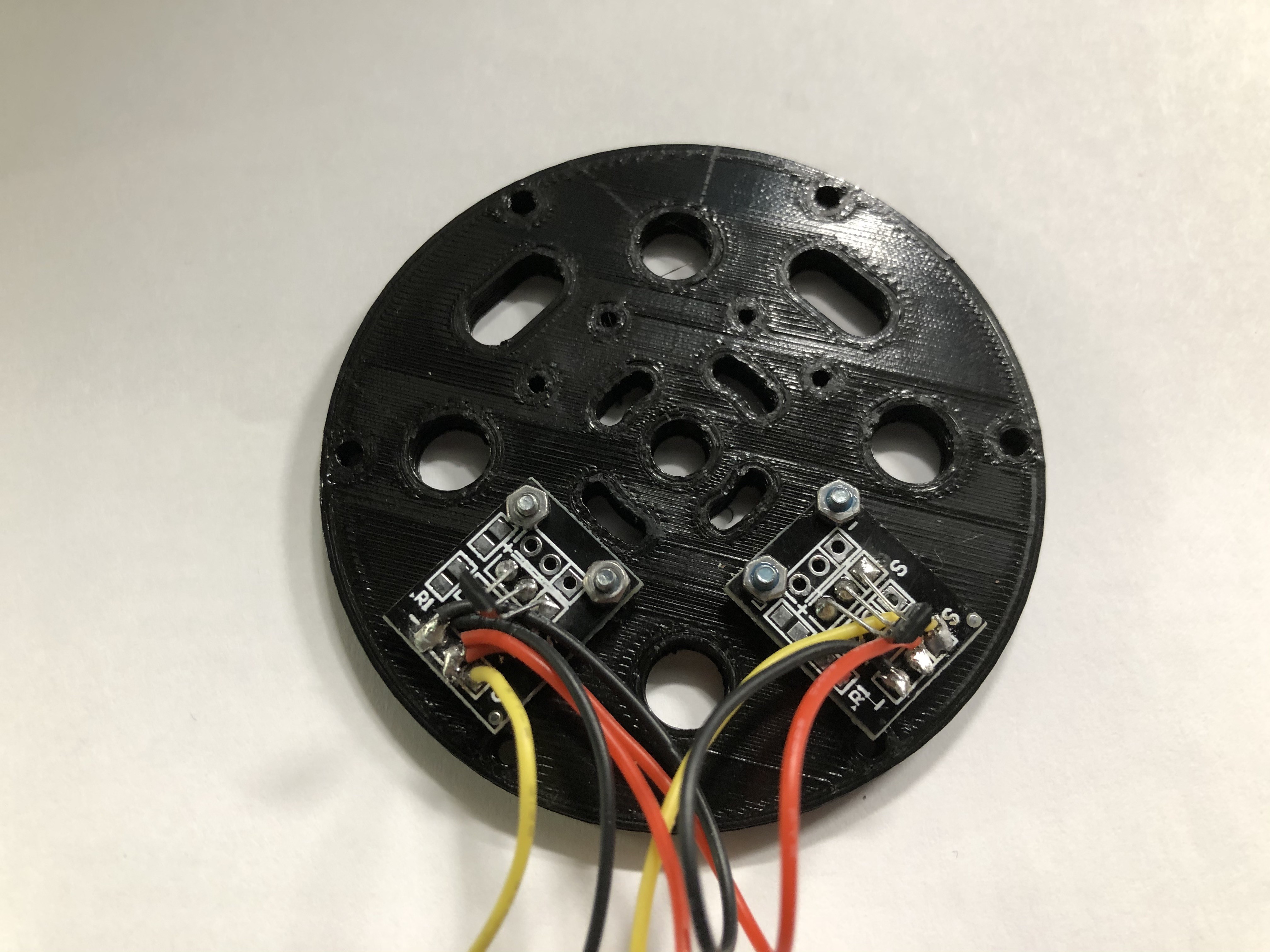
Motor base plate 3d Printed (small holes for hall effects sensors mounting)
![]()
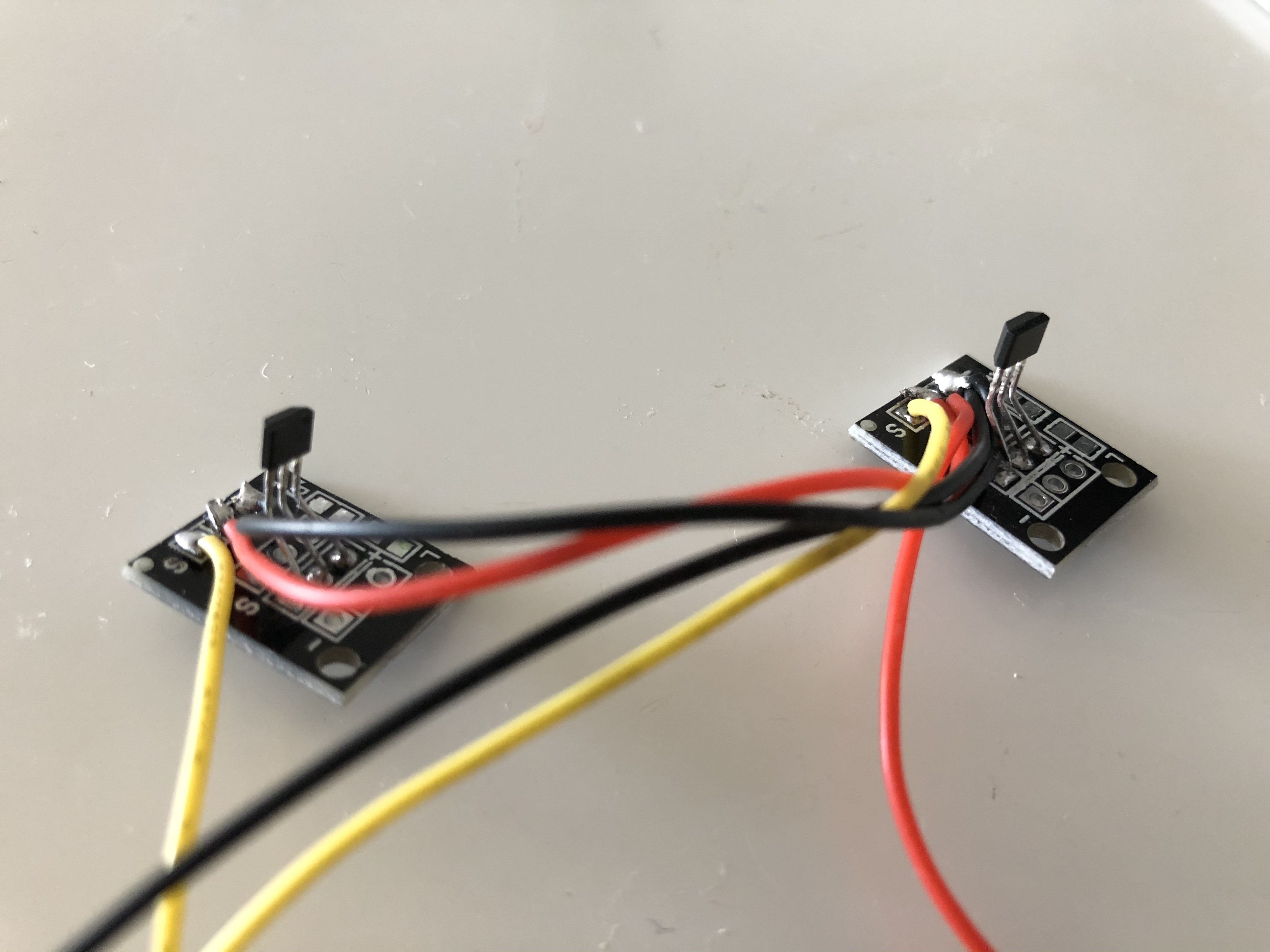
2 Hall sensors ready to be mount on base plate (49E 9148G sensor)
![]()
Sensors mounted to base
![]()
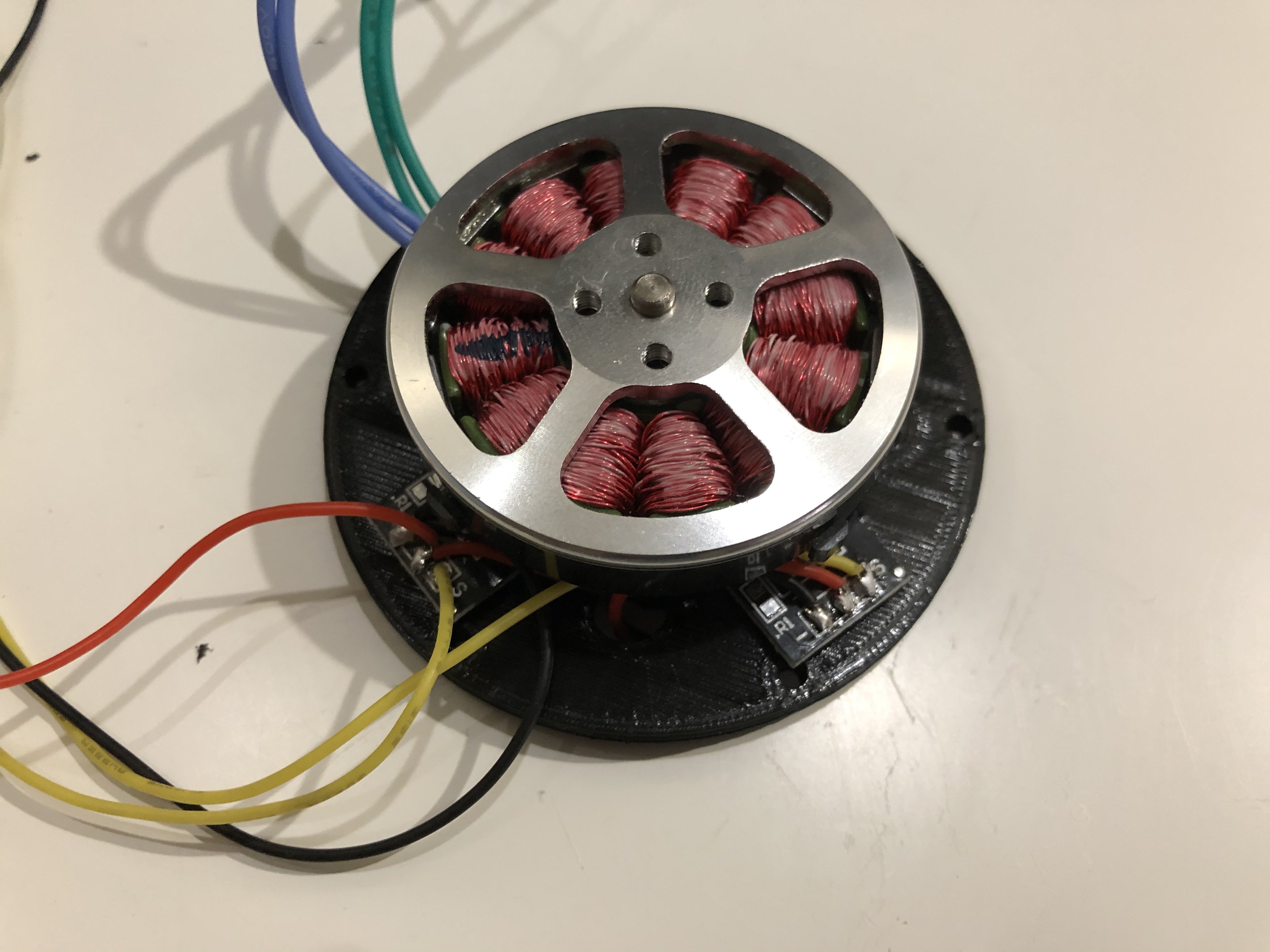
Motor mounted to base plate 1st hall sensor look at stator pole 12 2nd to 9 (it should be 90 degrees)
![]()
Sensorless motor test run
Sensored test run
Motor torque test
- 160 PWM - 70g/10cm or 700g/cm
- 255 PWM - 160g/10cm or 1600g/cm
Hi torque 3d printed cheap robot actuator
Cheap 3d printed hi torque robot actuator with electronics