 Miguel Ayuso Parrilla
Miguel Ayuso ParrillaThis log is just to let all know that I'm still working on the robot. It's been quite a long time without any update (Studiying physics require must of my time this past years) but I've been doing some important progress on leg design and simulation.
From now I'll be updating and producing more content about the robot. Stay tuned!
Until then, to ilustrate what is coming, here a render of the new leg.
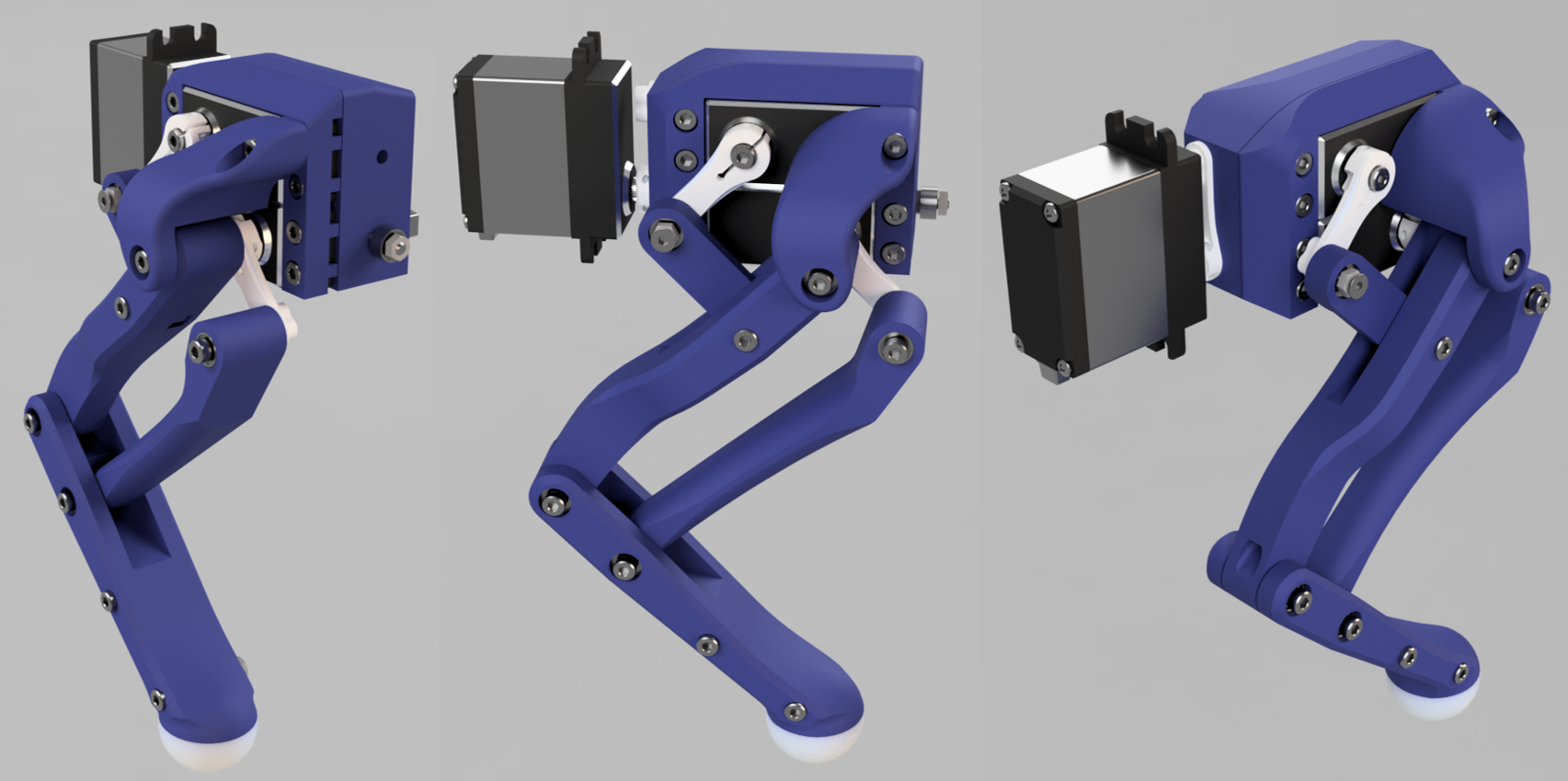
Testings on this design have shown a quite remarkable improvement on performance.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Very elegant design, I am most impressed !
Are you sure? yes | no
What do you think is responsible for the better performance? Is it the fact that the servo no longer moves with the leg, and so the moving part has less inertia?
Are you sure? yes | no
Yeah, what you pointed out is one of the reasons, but the most important one is that with this kind of lever mecanism, torque is shared between both servos unlike the previous design that most of the torque was transfered to only one servo.
Are you sure? yes | no
Oh, I didn't even think about it, make sense. Thanks!
Are you sure? yes | no