 Anthrobotics
AnthroboticsIt's been a long time since the last update, but we are finally ready for some real-world testing!
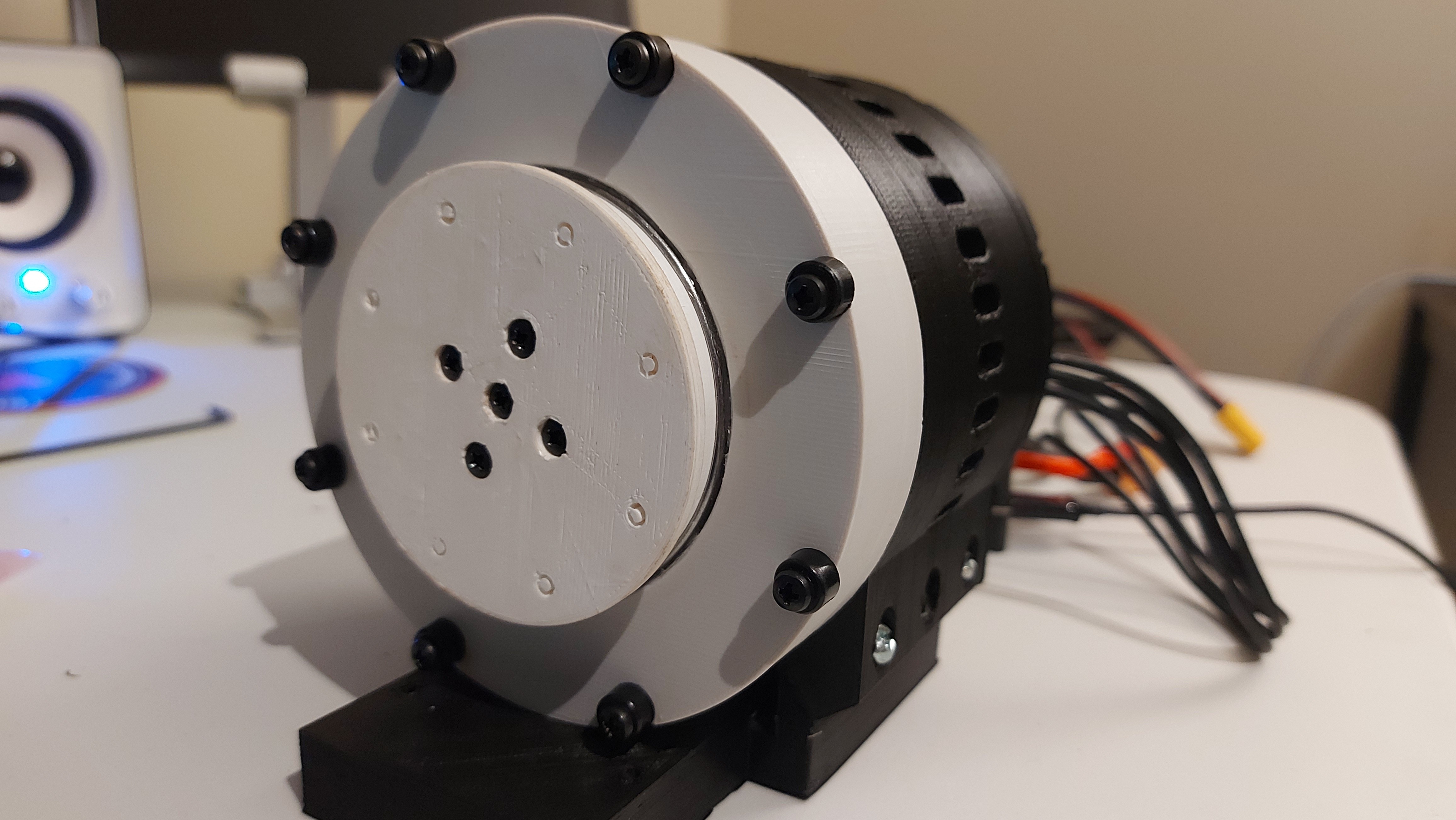
We have a completed actuator to test with the modified ESC, including the onboard absolute contactless encoder. This way we can implement position control on the motor-side of things, with the eventual goal of having a second encoder somewhere on the output side (say on a joint or chain and sprocket).
Stay tuned for a demo in the next couple of weeks!
Here is a video on the actuator undergoing testing with the ODrive motor controller. We will make a video comparing the ODrive to our modified bidirectional ESC once we get a stable position control method implemented.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.