 Val
ValI got the shocks and drive links ordered, modeled, and installed in the virtual assembly.

Next I am shopping for a hollow rotary reducer platform that will rotate the torso. Something like this:
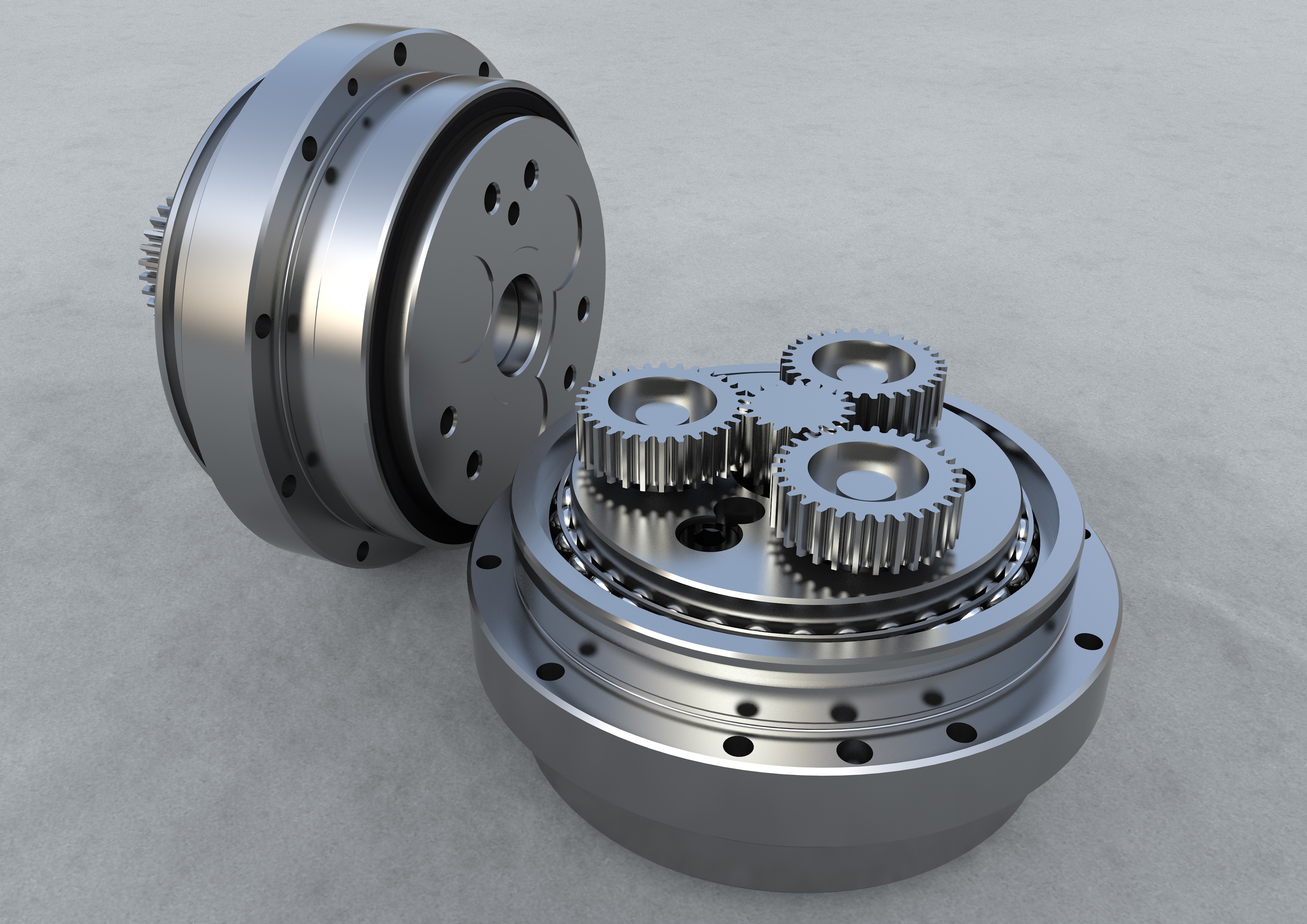
Most DC motors that work well for robotics applications have lower torque and aren't designed to withstand a significant off-axis force (i.e. torso trying to fall over and rip the motor flange out of the motor). Planetary gear reducers solve this problem because they have bearings to counteract off-axis force, and between 5:1 and 10:1 ratio that makes it possible to use a low power motor to turn a great deal of mass.
Unfortunately the American-made rotary reducers are around $4000, and buying a Chinese one for $400 is pretty scary because there is no guarantee that it will ever be shipped, will work, or will arrive this year. Let's see what happens!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.