 Val
ValThis week I got all actuators to work for one arm, but some of the wood parts broke, so I am waiting for stainless steel brackets to arrive from the manufacturer. I will be able to film everything moving once I replace the weak prototype parts.
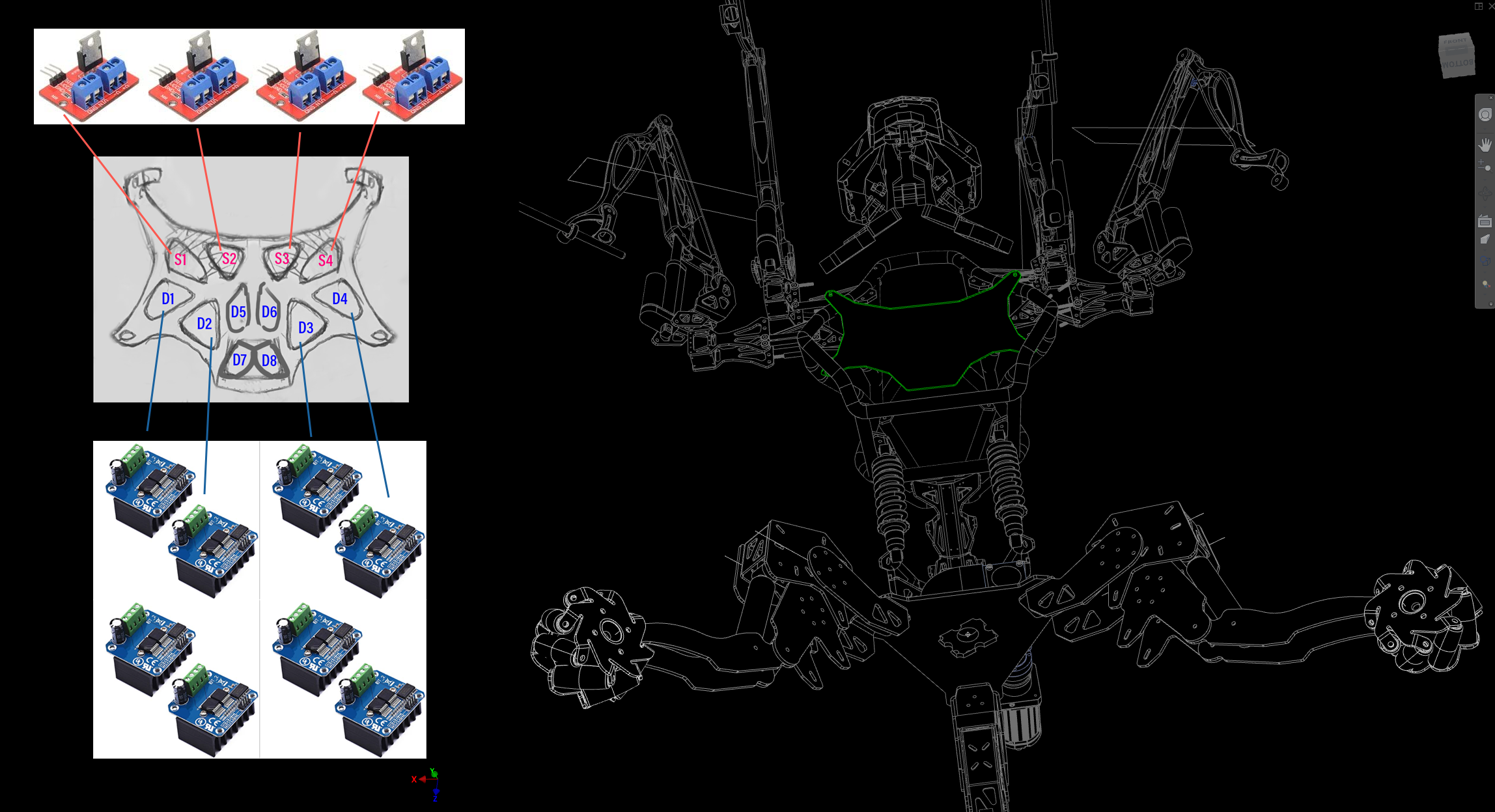
Meanwhile I'm working on more electronic layout, like finding a place for solenoid and servo driver boards. I think I will put all the drivers in the chest area, then Raspberri Pi goes in the middle, and power supplies go in the stomach.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.