 Lucas Gerez
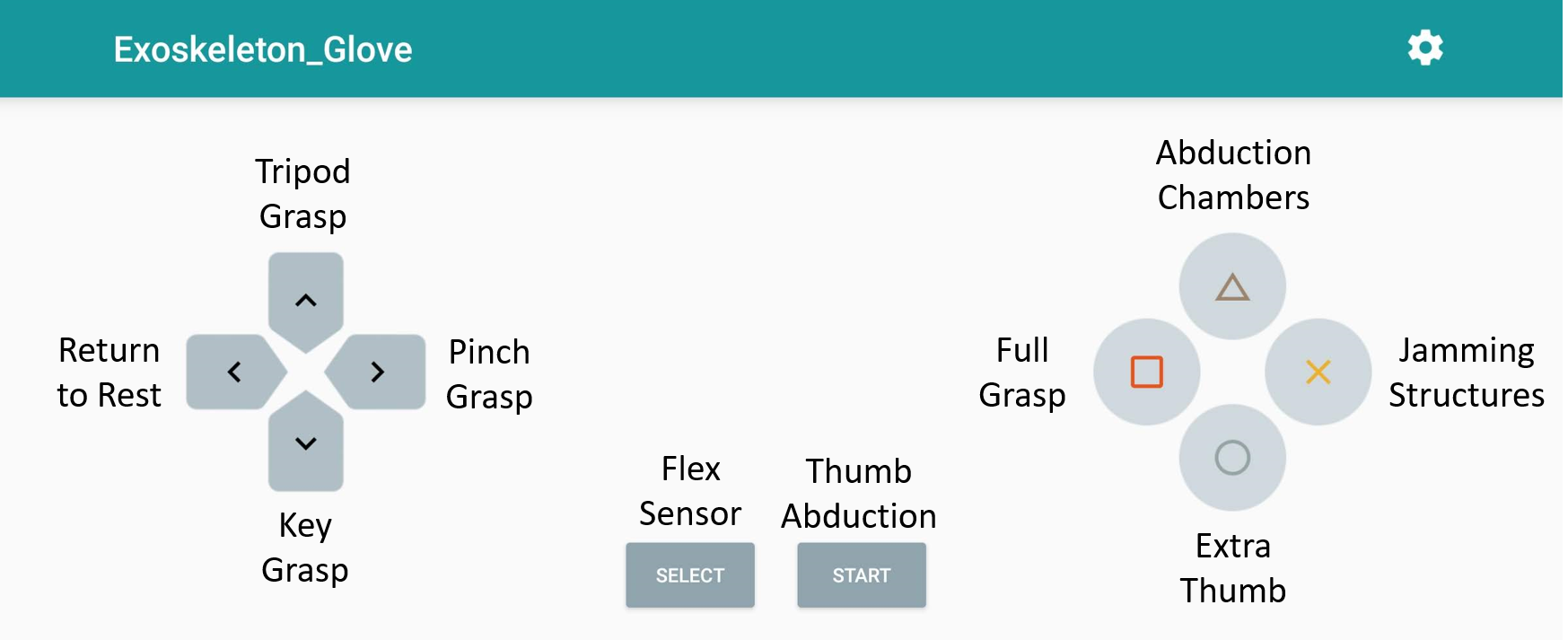
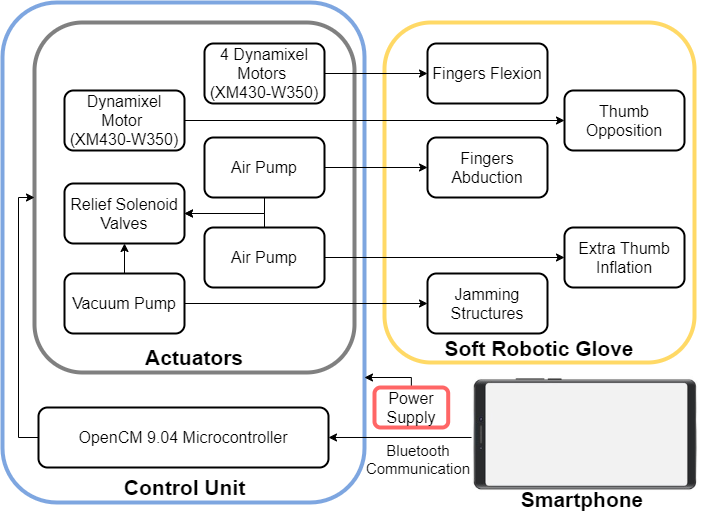
Lucas GerezThe hybrid, motorized exoskeleton glove uses an intuitive smartphone based interface, which allows the user selects the mode desired to control the exoskeleton glove. The user can combine the motions (e.g., full grasp with abducted fingers or tripod grasp with the extra thumb inflated and the jamming structures activated). The flex sensor can be used in order to trigger the desired function when a set bending angle is reached. The desired function is selected from a predefined set stored within the smartphone app, like tripod grasp, full grasp, or jamming structures triggering, as seen in the figures below. The information is transmitted to a microcontroller through Bluetooth communication. Then, the microcontroller activates the chosen actuators that are connected to the glove. Each air supply is connected to a solenoid valve that is used to release the air pressure of the system when the glove returns to its original position. The entire system is powered by a 12V power supply. A battery can be added to the control unit to make the device portable and wearable. The amount of force applied by each finger is determined through a current control of each motor and can be adjusted according to the user’s needs.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.