 Gertlex
GertlexTo connect to the laser, we need to identify what pins or test points to solder or otherwise connect wires to. Based on hearsay, the expectation was that the same interface as the XV11 Lidars was still in place:
- 115200 baud serial
- 3V3 logic (?verify)
- 5V power for the motor
The interface board, shown below, is also an interface for several other components on the vacuum: wheel motors, wheel encoders and speakers.
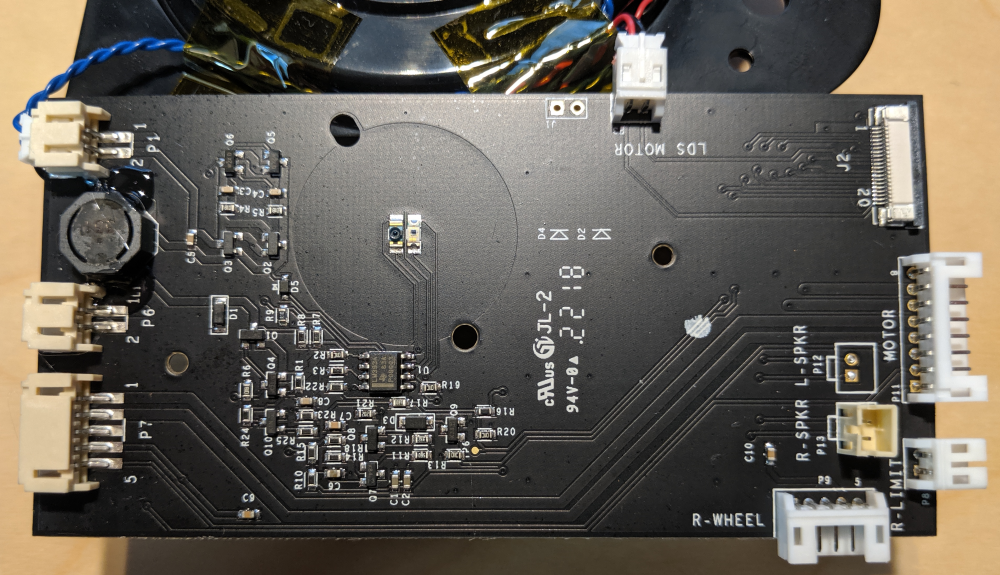
- Motor power: LDS MOTOR connector
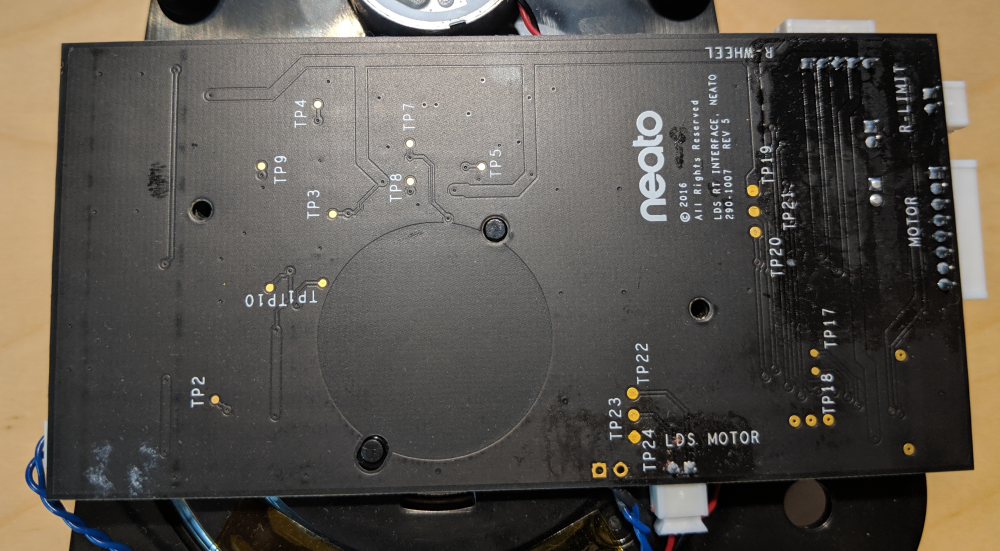
- GND: TP10
- TX: TP6
- RX: TP7
- VCC: TP3, TP19
Less relevant:
- Driving the inductor (blue wires): TP1 and TP2
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.