 Leandro
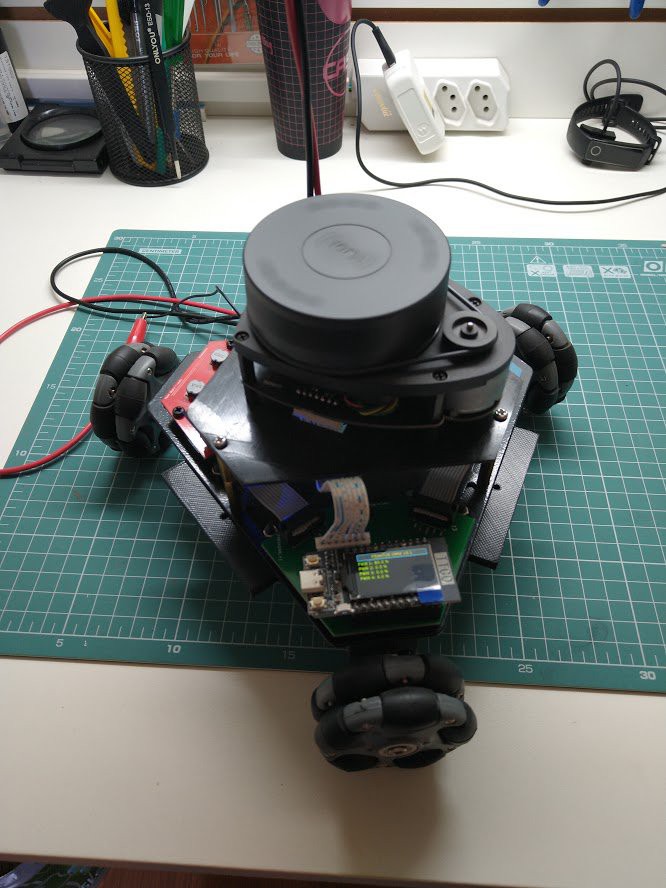
LeandroThe new control board rev0.2 arrived!!! All the components were soldered and the new board was tested in the robot.
This new board will speed the development since the lidar, ESP and motor have different voltages, so with this boars is possible to test and development directly in the robot.
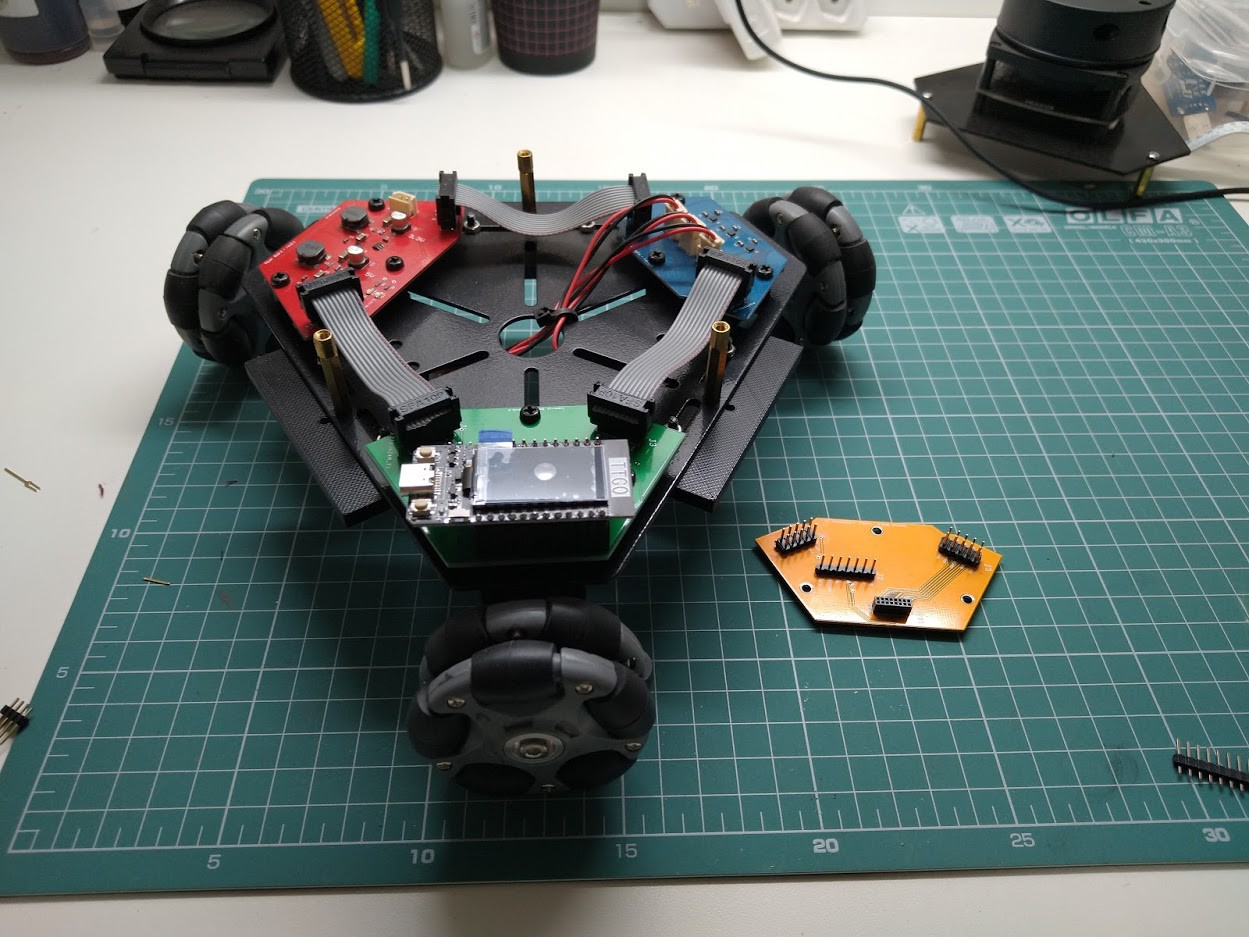
With this upgrade all the logical and control board are done, the last hardware need it is the batterry control board, which if anyone could recommend any design I would much appreciated! (the plan is to use 3 series and 2 parallel, total of six batteries).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.