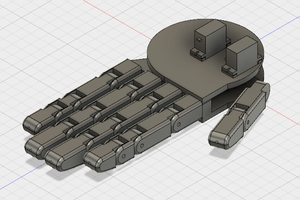
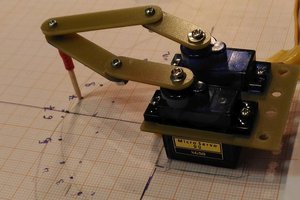
The goal of the first 1-3 prototypes is to hammer down the application of the Mckibben pneumatic muscles and the servo motors in conjunction with the hand assembly. After that, the goal will be to either A, make a full body suit or B, use more muscle sensors for a type of prosthetic hand with arm-enhancing capabilities. At that point, I will attempt to make the suit economically and time-management wise realistic to recreate and sell.
0%
0%
Oreon Exosuit
An exoskeleton that combines a rigid steel frame with soft robotics and servo motors.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Sergei V. Bogdanov
Sergei V. Bogdanov
 OpenBionics
OpenBionics