Kenny.Industries
Kenny.Industries-
Hedonistika 2022
11/27/2022 at 21:40 • 0 commentsYeah, so the arm was moving with the new shaker design, but definitely too heavy. It needs 4 bars to just lift the arm.
During the event, I fried the electronic boards by switching the 5v and 12v, because both had the same connector. Next time, i am using XT60 for 12Volts and barrel jacks for 5V. There is also a component, which if it detects a higher voltage than rated, it cranks up its impedence. But it requires further investigation and would further complicate things.
This year, the electronic boards (esp8266 and esp32) were connected over openWRT router, to the raspberry pi, running mosquitto (MQTT Broker) so the code on the microcontrollers were fairly simple, and the fine tuning could be done more efficiently and easily. The EMP of the compressor does not seem to pose a problem.
Need waterproof electronics housing though. -
It's aliiiive! Muhahaha! (I got it to work on the final day)
09/13/2021 at 18:41 • 0 comments -
How far did I came during ACRA v22?
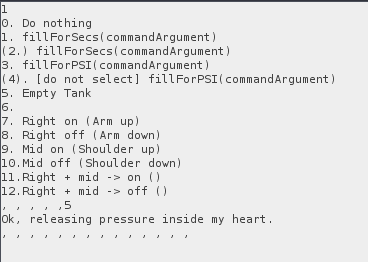
09/12/2021 at 20:04 • 0 comments1) Put together the compressor
2) I built in the electrical circuits which I made at ACRAv21 (during the online stream, which was lost due to configuration errors.
3) I put together the upper arm and lower arm with pneumatics
4) Programmed basic state based functions for the compressor and the arm.
![]()
Sources can be found here: https://github.com/KennyAwesome/ChaosCalmerBot/blob/master/chaosCalmerHardwaretest.ino
5) it moved at the end of this roboexotica. Link fill follow.
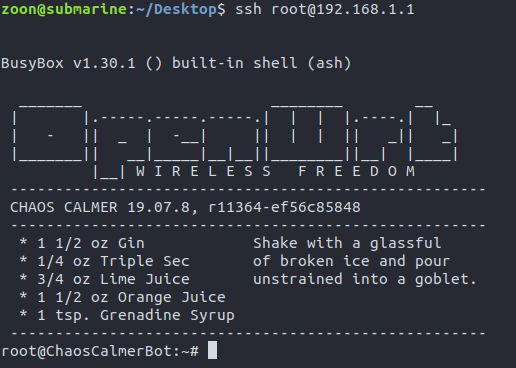
6) I set up an old router with openWRT and configured the ssh banner to the chaos calmer version. (because that specific version is depricated.)
![]()
7) Configured rpi a bit, but was not leading anywere dring this acra so i allocated my resourced to archieve 5)
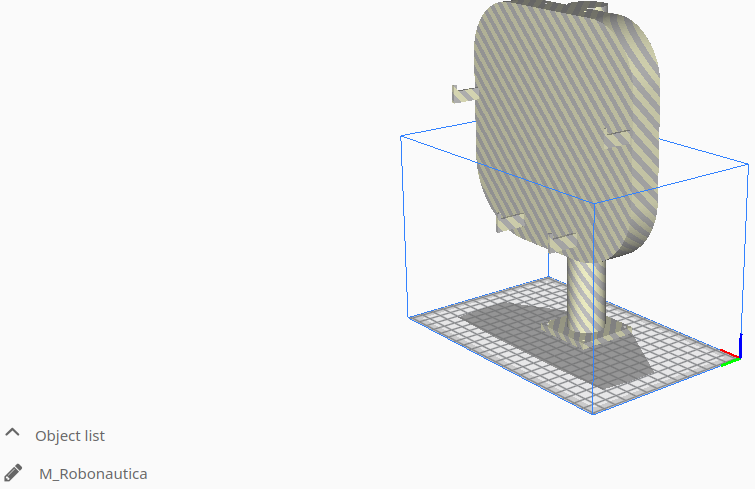
8) A visitor also helped me design the head of the robot, but I could not bring the local 3D printer to print me something, I left it be for future features. I liked that he misunderstood roboexotica with robonautica. One day, we might have cocktail robots on mars then that festival could be called "Robonautica".xD
![]()
-
ACRA v22 @DH5 (Linz, Austria)
09/12/2021 at 19:41 • 0 comments"The same procedure as every year." - Well said in "Dinner for one". My procedure for ACRA (Annual Cocktail Robot Award) is:
1) Working on the vision of the project for years (every year a different robot idea)2) Collecting parts.
3) Try out a bit and realize I bought the wrong parts.
4) Go to local hardware stores/home improvement stores and buy expensive replacement.
5) Re peat 2 - 4 until it is already time for ACRA.
6) Throw all the parts into my huge suitcases which becomes super heavy.
7) Bring the parts to Roboexotica and build it there.
8) Get it to do something, which was only a small part of what I actualy wanted to achieve.
9) Still get some awards for special categories, because I take the liberty to just do what I want there.
10) Be happy that my efforts has been acknowledged by the jury.
This year, my bot won the "innovation award", which made me super happy, because it is truely something I have been working on.
I wanted to see a cocktail robot, which shakes proper cocktails.
And this year I said to myself:
1) Do one thing and do it well: Only one cocktail. (Unfortunate it did not came that far, but made the project less complex.2) Implement the most important feature: The shaking arm. (I got it moving, link will be updated later.
3) Enjoy the process, don't get too attached to the award itself or the money. So I was just making it, without serving it. Occasionally explaining it to people I liked.
4) Help others for their repairs, since I have occupated the workshop for myself.
5) Performance art: How innovations are born: Out of necessecity.
6) Don't get lost in planning, just get started.
Every project of mine so far has questions I want answers to. This year, I was asking: "What is an ideal human?" Of course, there are many answers to this question. But I realized of the conceptualization phase, that the ideal human does not need tools, because it has already the capability it desires as body functions. For instance, if you had the ability to remember everything instantly (like fotographic memory) there would be no need to buy an ebook reader, since you coud just go to library and look through the pages super fast and then you can just access that later. Since we don't have them all, since we cannot have them all, we have to accept, that we as humans cannot be ideal. Therefore we will always need tools. Therefore we need to take care and improve the tools we use in order to live.
Since the idealization is based on skills and the preservation of valuable skills becomes apparent. And the nature of a skill is a request. Because there is no meaning in having a skill when you don't use it. And when it is a skill which you don't need for yourself, then the only time one will need that skill, is when asked to. One of the fundamental value of a human lies in the ability to help other creatures unconditionally. Thus this ideal skill will need ot be a request. Since an ideal human does not die, because it has the ability to live forever, the ideal human boils down to wait for the request for the valuable skill for humanity. In a sense, it is a "Genie" ( https://en.wikipedia.org/wiki/Genie_(Disney) ) That Genie also confirms that he does not need tools to fulfill the request.
And here lies the double edges sword: Since a Genie can do everything, you have to formulate carefully.
If I were to create such an ideal human, I would "verewigen" (german word for "eternalize") my skill as a bartender for shaking a proper cocktail. The value of a proper cocktail are fundamentally the following three:
1) Alcohol2) Sugar
3) Entertainment
The reason why most cocktails are shaken and not stirred is, because by shaking, you cool down the cocktail so the taste of alcohol and sugar are not that annoying, since our taste buds are less sensitive when the operating temperature is low. The dilemma is, if you shake too slowly or too long (usually in combination) then the cocktail will suck, because it will be watery and not really cool. Thus there is a sweetspot where it cools the cocktail down but still the ice has not still melted.
And I believe that this cocktail can be created by ChaosCalmerBot.
Since I have finally figured out, what I wanted to create, I will no longer start making a different robot until this robot is complete. But every year I will keep building on new features, to approximate to the "ideal cocktail" ("Cup of God" from the anime "Bartender"). And this will be the Entertainment component.
In the sense of Mr. Spock, I want to "Live long and prosper" to keep building cocktail robots. Thank you all for your support and enabling all of this. -
Planning the road map
07/03/2020 at 21:07 • 0 commentsKW -> calender week in german abbreviation
Project start: KW27
Roboexotica KW48
-> I have 21 Weeks, so for each step I can use 2 Weeks roughtly, I will be busy with other stuff in life so wouldn't be too generous with it.
Week 1: Compressor
Week 16: Testest some neumatic parts for the compressor, but cannot decide for a final design and thus postponed the deadline for one year. Should probably make a blueprint as I did in my good old days with pencil and paper.
-
Brainstorm - Silence Before the storm
07/03/2020 at 17:24 • 0 commentsMetric recipe for Chaos Calmer:
4,4cl gin, want to use quality gin like "The Duke" (external link)
0,74cl triple sec, might be replaced with hops-liquor by "Hopfa" (See external link)
2,2 cl lime juice
4,4cl orange juice
0,5cl grenadineTotal 12.24 cl
Is a usual serving at a bar from my experience. It is actually measured in volume but for my project I will need this recipe in grams, which we will do in the future with a syringe and a precision scale. I want to measure the bottles with the liquids constantly to be able to measure out the liquids and not running on empty, which can be a little bit fatal, because I want to pressurize the bottles (not too much) like a kegerator, in that way, I don't need the ugly and slow peristaltic motors.
I have once made a simple robot arm with just a dc motor and at the pivot point a potentiometer. This robot will get ice from a rotatable carrousel with dispensable cups (hopefully paper, since it has a flat bottom and more environmentally friendly) and everything will be controlled via mqtt on a raspberry pi and a 12v simple router (not running openWRT....yeah kinda defeats it's purpose). I chose mqtt because it is flexible and asynchronous and i love ESP8622, and I want to expland my knowledge with ESP32 this time, I hope it does not escalate too much. This approach keeps the option open to have a ESP or even nodeRed server on the raspberry to control the whole thing, which does not involve tiresome debugging. It decouples the application (making cocktail) from the firmware (controlling motors) which is a good practice, since my things are usually hardcoded, which is not a good practice.
I specifically chose one cocktail, because I wanted to focus on the reduction of human interaction, because I don't like babysitting robots. Makes me feel like a bad cog in a machine. I have been at roboexotica many times also as exhibitor, and you have to explain your robot everytime to everyone to sell your cocktail to finance back a little bit, because making robots is usually not cheap and I want to refund my travelling costs.
The idea for the cocktail shaker took me two years to come up: There is a stainless steel container with acrylic lid which is hinged. This hinge will be the middle point for some aluminum profile piece which is connected with a pneumatic cylinder. My hope is, that the pressure of the pneumatic cylinder is great enough to close it airtight but easy to open with the pneumatic cylinder. On the lid, there is a hole for stainless steel quick push. There will be only one hose and it will be connected to a manifold which is connected to the bottle of spirits and water. The bottles has air inlets with seperate electromagnetic valves, and i hope that the low pressure will be enough otherwise i have to put seperate flow regulators on each valve afterwards. Need to test. Currently I am not sure, whether i should open the valves seperately or at the same time.
This shaker is mounted on the right arm which is pneumatic. It should be removable for cleaning. There will be a load cell on lower arm, not taking the full load like the openDog from Xrobots but mounted in parallel. My hope is, that through the maximal weight, an appropriate acceleration can be calibrated or maybe just a threshold. but definitely a interesting data to look at. Because shaking requires timing, which cannot be hardcoded, otherwise it won't shake well. Since pneumatics cannot be really well position controlled (possible but requires precise pressure difference controlling with some absolute measuring point) i would mount several hall sensors to also trigger the shaking motion. I am currently thinking whether I should use a AS5600 magnetic encoder or something to be able to control the motion more precisely.
It is my vice and virtue to pursuit beauty in motion and my ideal shaking technique is shaking up and down with one arm. You can find it in the link collection under "Shaking technique". I could have made it simpler, but it is a compromise i cannot make. It is the technique i used when I worked at the bar.There is for me the so called "ice problem" (originally from Iron Man). Ice clumps together and melts and is difficult to dose and requires too much energy to make it on your own. Therefore I came up with the carrousel idea, where few glasses will be prefilled by humans and put it in there and through distance sensor, provides like a revolver the glassed to the robot. I will melt a bit but I hope that enough people will want the cocktail so it won't be a issue. Additionally, i thought about a sieve and the carousel will drop the ice into the cups. But i will let it open for future development, keep it simple stupid. It can notify when you are out of glasses. Will have a stepper motor and hallsensor to controll position. I am thinking about six of these. First prototype will be laser cut i guess.
To take the cup, pour the ice into the shaker and serve the cup to the final destination, a stepper motor controlled arm will be used, which is the left arm. This is where I am currently still thinking about. I would prefer, to have a shoulder motion with pneumatics on both arms, which would look more spectacular, but requires a lot of the left stepper arm. the alternative is keep the upper arms in parallel but raise one shoulder and lower other shoulder like a parallelogram. This is simpler, but doesnt look spectacular and requires wrist rotational movement. which can be tricky for the right arm, since will make the arm more unstable und not ridgit. And I am not sure whether i want a wrist suspended with springs to maximize the shaking effect. The left hand has a pneumatic suction cup to hold on to the cup while pouring the ice into the shaker.
This year I want to have a bank note acceptor. And if i have too much time, a nfc payment device. But first, I guess i will make a universal coin acceptor out of a ammunition case.
Finally, the head will be a pretty loud speaker, explaining and advertising itself, so I don't have to. I will have some kind of mqtt client which notifies me if there is any problem, kinda like a debug terminal. I would add vibraiton, because it will be pretty loud.------------------------------------------------------------
So in conclusion, there are the following parts for the project (breaking up a big project in small pieces will help with organizing minds and will be built in the numbered order for priorities.
1) Raspberry Pi with mqtt server (+ultra: node red)
2) Intelligent Compressor: I want to keep the pressure for the system small as possible, because it is my first project with pneumatics. It has a analog pressure sensor and 12v compressor. It will be loud, but yeah, i don't have the options i guess.
3) Shaker: It is kinda difficult so I have to try it first so I have more time to work on solutions.
4) Pneumatic right arm: Shaking motion with hopefully working shaker system
5) Bottle Dispenser: 6 bottles (5 ingredients, 1 Water for cleaning)
6) Carousel
7) Final Destination (it has to put the cup somewhere, where there is some explanation)
8) Explaining Head (with some servo motion and speaker, connected to RPi)
9) Money acceptor
10) MQTT Client Terminal, so i don't have to babysit
Chaos Calmer Bot
Pneumatic robot that can mix, shake with ice and serve the world famous cocktail "Chaos Calmer" from openWRT for RoboExotica.